{width=500px}
In the last two lecturs, we discuss a general framework for learning, neural networks. ## History and recent surge From [Wang and Raj (2017)](https://arxiv.org/pdf/1702.07800.pdf):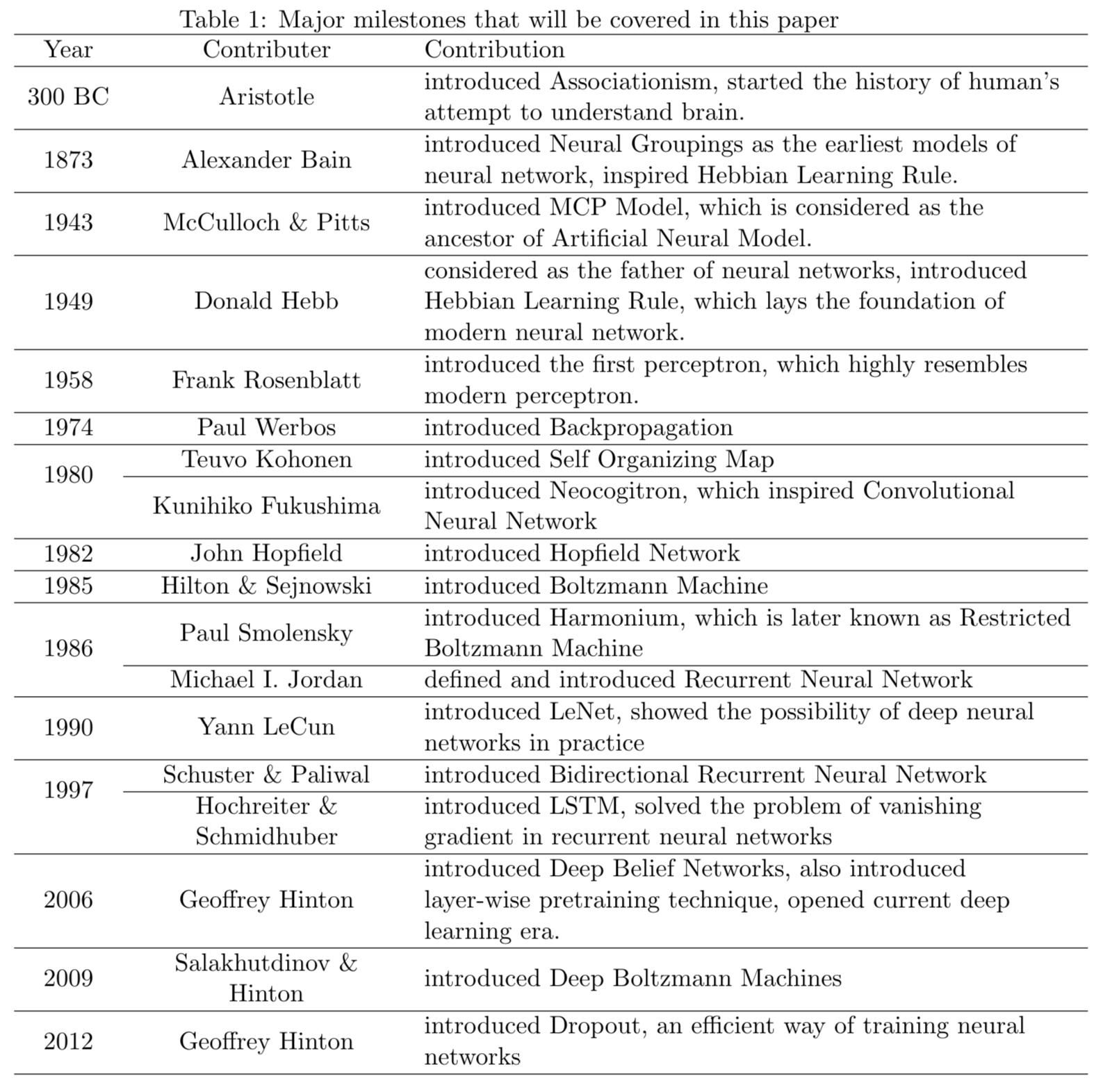{width=500px}
## Learning sources - _Elements of Statistical Learning_ (ESL) Chapter 11: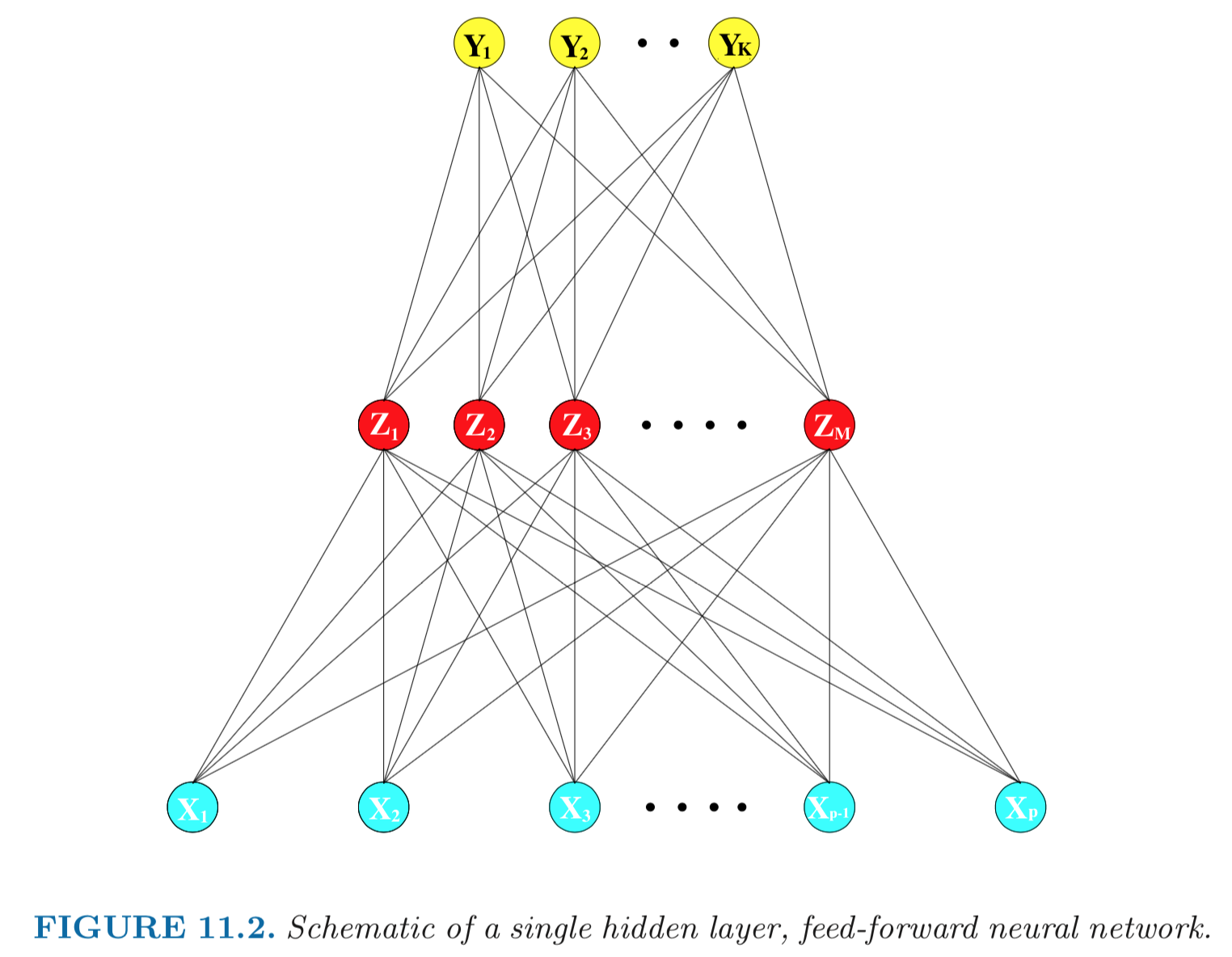{width=500px}
- Mathematical model: \begin{eqnarray*} Z_m &=& \sigma(\alpha_{0m} + \alpha_m^T X), \quad m = 1, \ldots, M \\ T_k &=& \beta_{0k} + \beta_k^T Z, \quad k = 1,\ldots, K \\ Y_k &=& f_k(X) = g_k(T), \quad k = 1, \ldots, K. \end{eqnarray*} - **Output layer**: $Y=(Y_1, \ldots, Y_K)$ are $K$-dimensional output. For univariate response, $K=1$; for $K$-class classification, $k$-th unit models the probability of class $k$. - **Input layer**: $X=(X_1, \ldots, X_p)$ are $p$-dimensional input features. - **Hidden layer**: $Z=(Z_1, \ldots, Z_M)$ are derived features created from linear combinations of inputs $X$. - $T=(T_1, \ldots, T_K)$ are the output features that are directly associated with the outputs $Y$ through output functions $g_k(\cdot)$. - $g_k(T) = T$ for regression. $g_k(T) = e^{T_k} / \sum_{k=1}^K e^{T_k}$ for $K$-class classification (**softmax regression**). - Number of **weights** (parameters) is $M(p+1) + K(M+1)$. - **Activation function** $\sigma$: - $\sigma(v)=$ a step function: human brain models where each unit represents a neuron, and the connections represent synapses; the neurons fired when the total signal passed to that unit exceeded a certain threshold. - **Sigmoid** function: $$ \sigma(v) = \frac{1}{1 + e^{-v}}. $$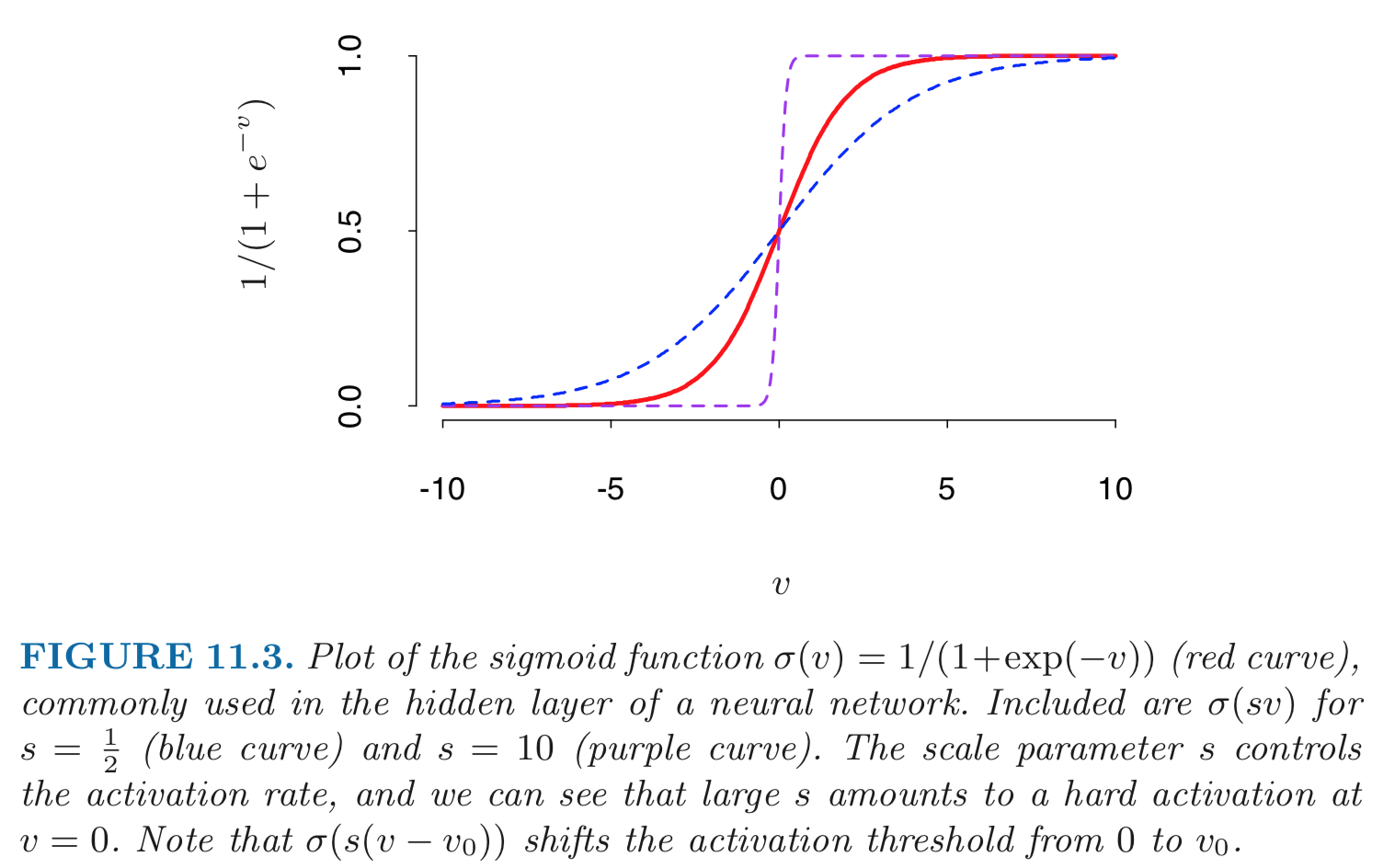{width=500px}
- **Rectifier**. $\sigma(v) = v_+ = max(0, v)$. A unit employing the rectifier is called a **rectified linear unit (ReLU)**. According to Wikipedia: _The rectifier is, as of 2018, the most popular activation function for deep neural networks_. - **Softplus**. $\sigma(v) = \log (1 + \exp v)$.{width=400px}
- Given training data $(X_1, Y_1), \ldots, (X_n, Y_n)$, the **loss function** $L$ can be: - Sum of squares error (SSE): $$ L = \sum_{k=1}^K \sum_{i=1}^n [y_{ik} - f_k(x_i)]^2. $$ - Cross-entropy (deviance): $$ L = - \sum_{k=1}^K \sum_{i=1}^n y_{ik} \log f_k(x_i). $$ - Model fitting: **back-propagation** (gradient descent) - Consider sum of squares error and let \begin{eqnarray*} z_{mi} &=& \sigma(\alpha_{0m} + \alpha_m^T x_i) \\ R_i &=& \sum_{k=1}^K [y_{ik} - f_k(x_i)]^2. \end{eqnarray*} - The derivatives: \begin{eqnarray*} \frac{\partial R_i}{\partial \beta_{km}} &=& -2 [y_{ik} - f_k(x_i)] g_k'(\beta_k^T z_i) z_{mi} \equiv \delta_{ki} z_{mi} \\ \frac{\partial R_i}{\partial \alpha_{ml}} &=& - 2 \sum_{k=1}^K [y_{ik} - f_k(x_i)] g_k'(\beta_k^T z_i) \beta_{km} \sigma'(\alpha_m^T x_i) x_{il} \equiv s_{mi} x_{il}. \end{eqnarray*} - Gradient descent update: \begin{eqnarray*} \beta_{km}^{(r+1)} &=& \beta_{km}^{(r)} - \gamma_r \sum_{i=1}^n \frac{\partial R_i}{\partial \beta_{km}} \\ \alpha_{ml}^{(r+1)} &=& \alpha_{ml}^{(r)} - \gamma_r \sum_{i=1}^n \frac{\partial R_i}{\partial \alpha_{ml}}, \end{eqnarray*} where $\gamma_r$ is the **learning rate**. - Back-propagation equations $$ s_{mi} = \sigma'(\alpha_m^T x_i) \sum_{k=1}^K \beta_{km} \delta_{ki}. $$ - Two-pass updates: \begin{eqnarray*} & & \text{initialization} \to \widehat{f}_k(x_i) \quad \quad \quad \text{(forward pass)} \\ &\to& \delta_{ki} \to s_{mi} \to \widehat{\beta}_{km} \text{ and } \widehat{\alpha}_{ml} \quad \quad \text{(backward pass)}. \end{eqnarray*} - Advantages: each hidden unit passes and receives information only to and from units that share a connection; can be implemented efficiently on a parallel architecture computer. - Stochastic gradient descent (**SGD**). In real machine learning applications, training set can be large. Back-propagation over all training cases can be expensive. Learning can also be carried out **online** — processing each batch one at a time, updating the gradient after each training batch, and cycling through the training cases many times. A training **epoch** refers to one sweep through the entire training set. **AdaGrad** and **RMSProp** improve the stability of SGD by trying to incorpoate Hessian information in a computationally cheap way. - Neural network model is a **projection pursuit** type additive model: $$ f(X) = \beta_0 + \sum_{m=1}^M \beta_m \sigma(\alpha_{m0} + \alpha_M^T X). $$ ## Multi-layer neural network (MLP) - Aka multi-layer perceptron (MLP). - 1 hidden layer: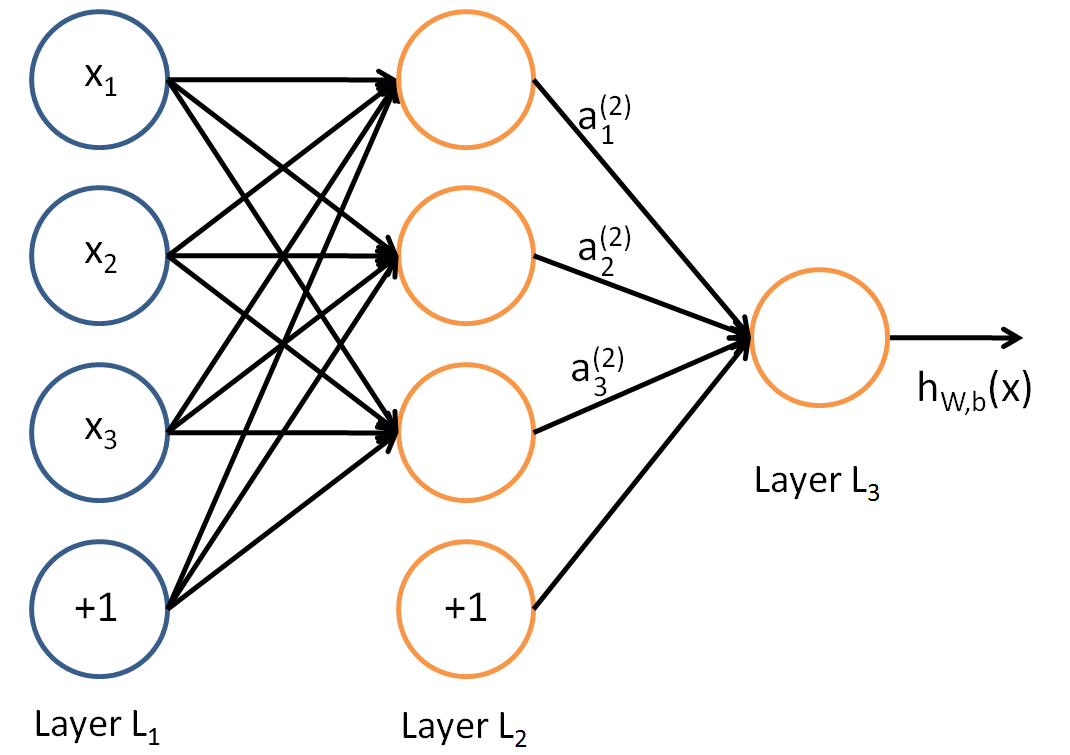{width=400px}
- 2 hidden layers: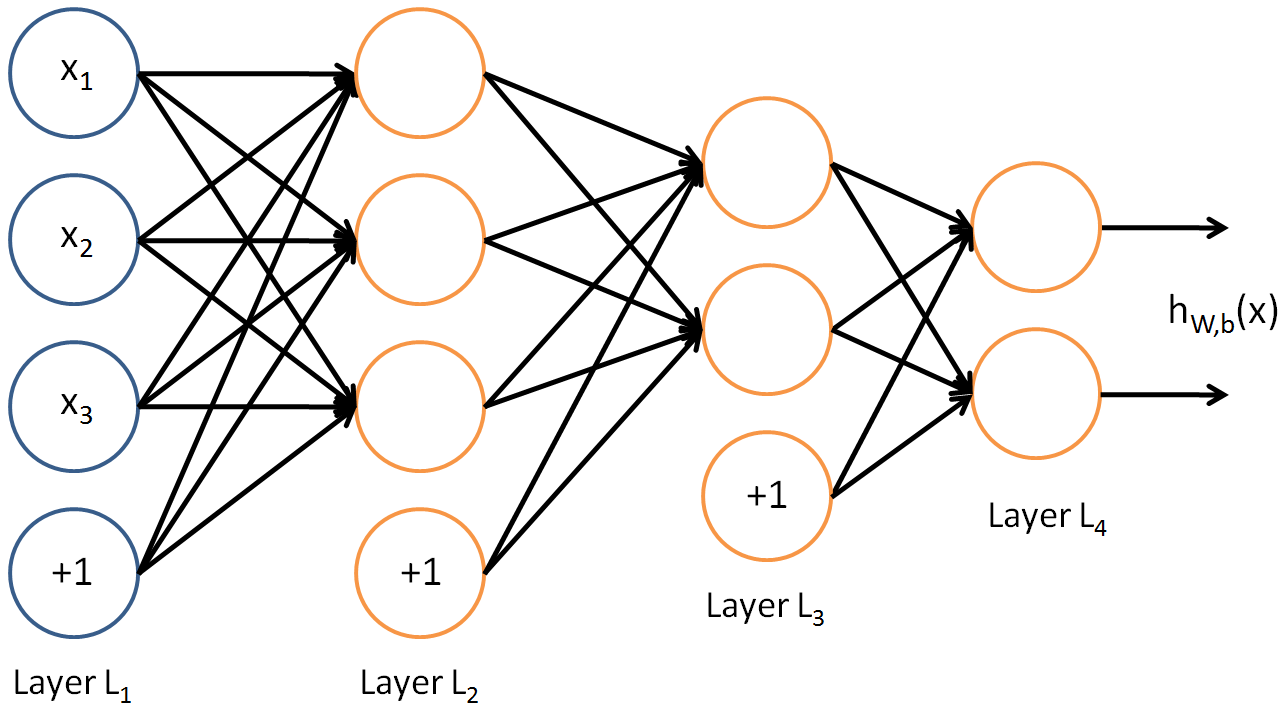{width=400px}
## Universal approximation properties - Boolean Approximation: an MLP of one hidden layer1 can represent any boolean function exactly. - Continuous Approximation: an MLP of one hidden layer can approximate any bounded continuous function with arbitrary accuracy. - Arbitrary Approximation: an MLP of two hidden layers can approximate any function with arbitrary accuracy. ## Practical issues Neural networks are **not a fully automatic tool**, as they are sometimes advertised; as with all statistical models, subject matter knowledge should and often be used to improve their performance. - Starting values: usually starting values for weights are chosen to be random values near zero; hence the model starts out nearly linear (for sigmoid), and becomes nonlinear as the weights increase. - Overfitting (too many parameters): 1. early stopping; 2. weight decay by $L_2$ penalty $$ L(\alpha, \beta) + \frac{\lambda}{2} \left( \sum_{k, m} \beta_{km}^2 + \sum_{m, l} \alpha_{ml}^2 \right). $$ $\lambda$ is the **weight decay parameter**. 3. **Dropout**. At each training case, individual nodes are either dropped out of the net with probability $1-p$ or kept with probability $p$, so that a reduced network is left; incoming and outgoing edges to a dropped-out node are also removed. Forward and backpropagation for that training case are done only on this thinned network.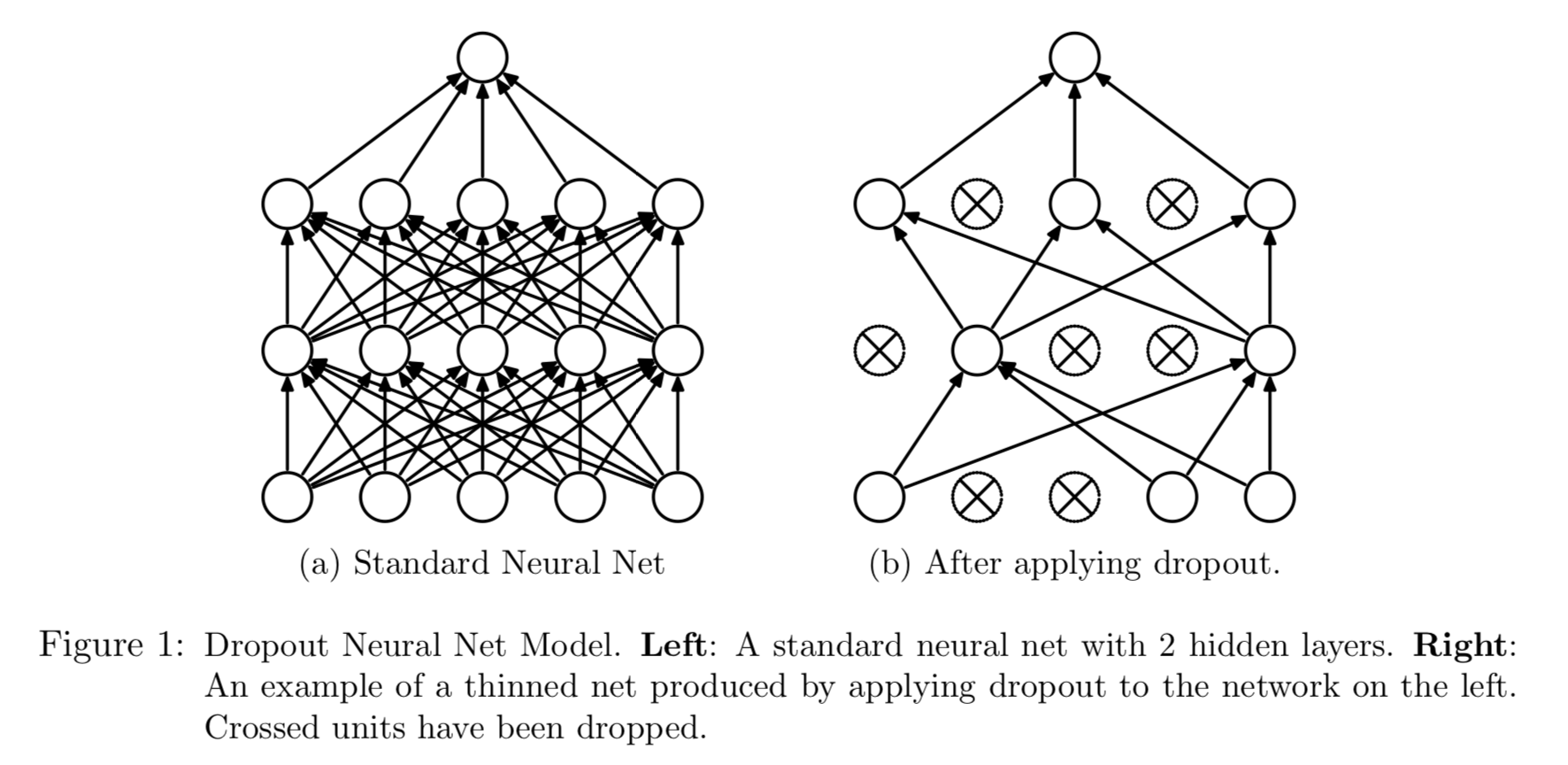{width=500px}
Figure from [Srivastava, Hinton, Krizhevsky, Sutskever, and Salakhutdinov (2014)](https://www.cs.toronto.edu/~hinton/absps/JMLRdropout.pdf). - Scaling of inputs: mean 0 and standard deviation 1. With standardized inputs, it is typical to take random uniform weights over the range [−0.7,+0.7]. - How many hidden units and how many hidden layers: guided by domain knowledge and experimentation. - Multiple minima: try with different starting values. ## Convolutional neural networks (CNN) Sources: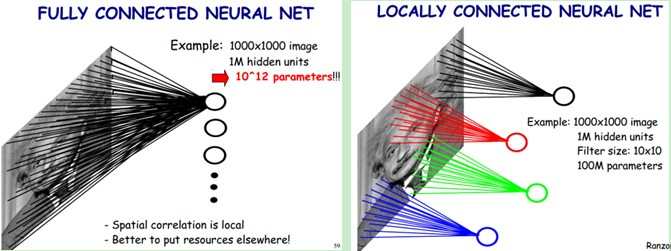{width=500px}
- **Fully connected networks** don't scale well with dimension of input images. E.g. $96 \times 96$ images have about $10^4$ input units, and assuming you want to learn 100 features, you have about $10^6$ parameters to learn. - In **locally connected networks**, each hidden unit only connects to a small contiguous region of pixels in the input, e.g., a patch of image or a time span of the input audio. - **Convolutions**. Natural images have the property of being **stationary**, meaning that the statistics of one part of the image are the same as any other part. This suggests that the features that we learn at one part of the image can also be applied to other parts of the image, and we can use the same features at all locations by **weight sharing**.{width=400px}
Consider $96 \times 96$ images. For each feature, first learn a $8 \times 8$ **feature detector** (or **filter** or **kernel**) from (possibly randomly sampled) $8 \times 8$ patches from the larger image. Then apply the learned detector to all $8 \times 8$ regions of the $96 \times 96$ image to obtain one $89 \times 89$ convolved feature for that feature. From [Wang and Raj (2017)](https://arxiv.org/pdf/1702.07800.pdf):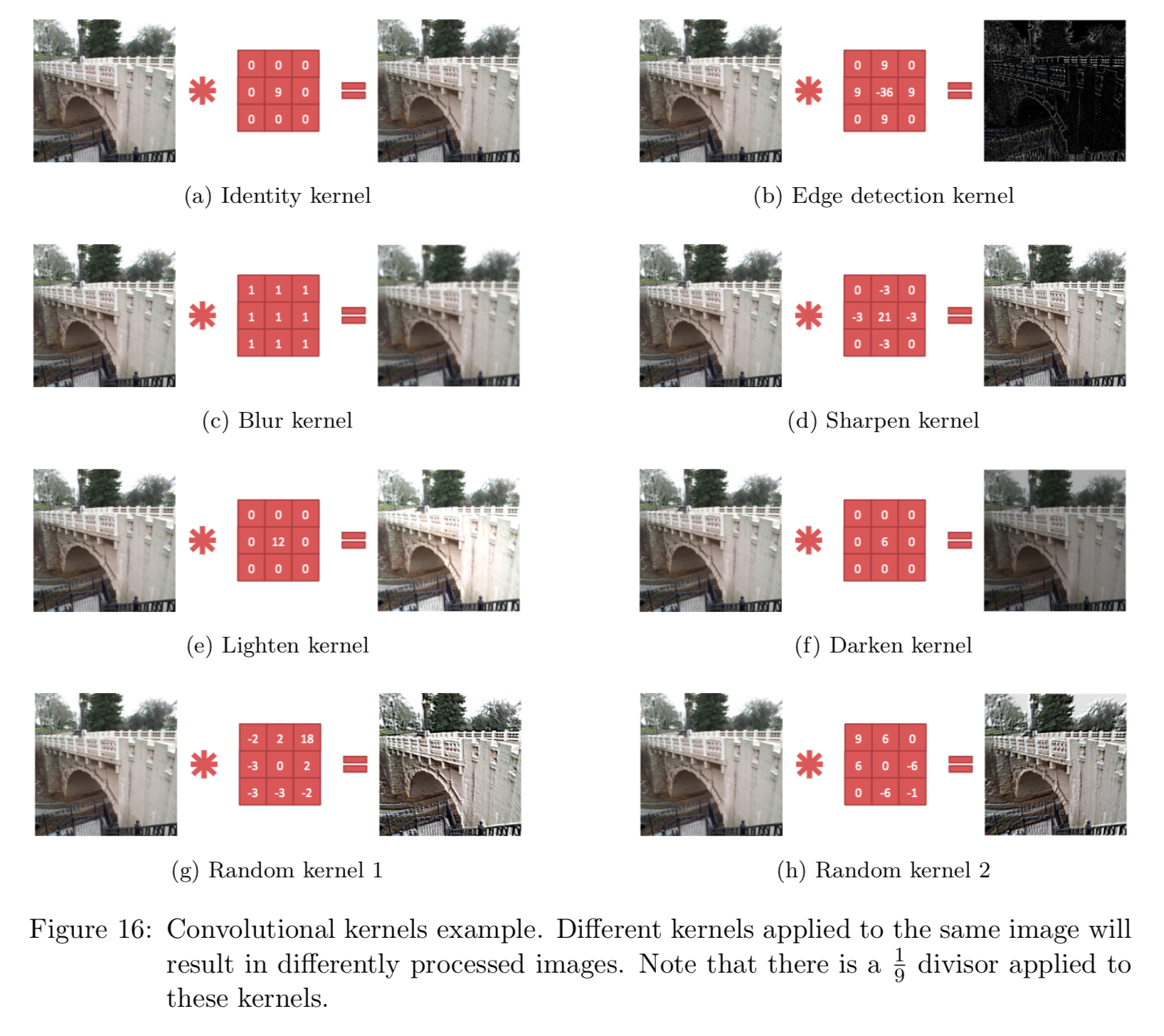{width=700px}
- **Pooling**. For a neural network with 100 hidden units, we have $89^2 \times 100 = 792,100$ convolved features. This can be reduced by calculating the mean (or max) vale of a particular feature over a region of the image. These summary statistics are much lower in dimension (compared to using all of the extracted features) and can also improve results (less over-fitting). We call this aggregation operation **pooling**, or sometimes **mean pooling** or **max pooling** (depending on the pooling operation applied).{width=400px}
- **Convolutional neural network (CNN)**. Convolution + pooling + multi-layer neural networks.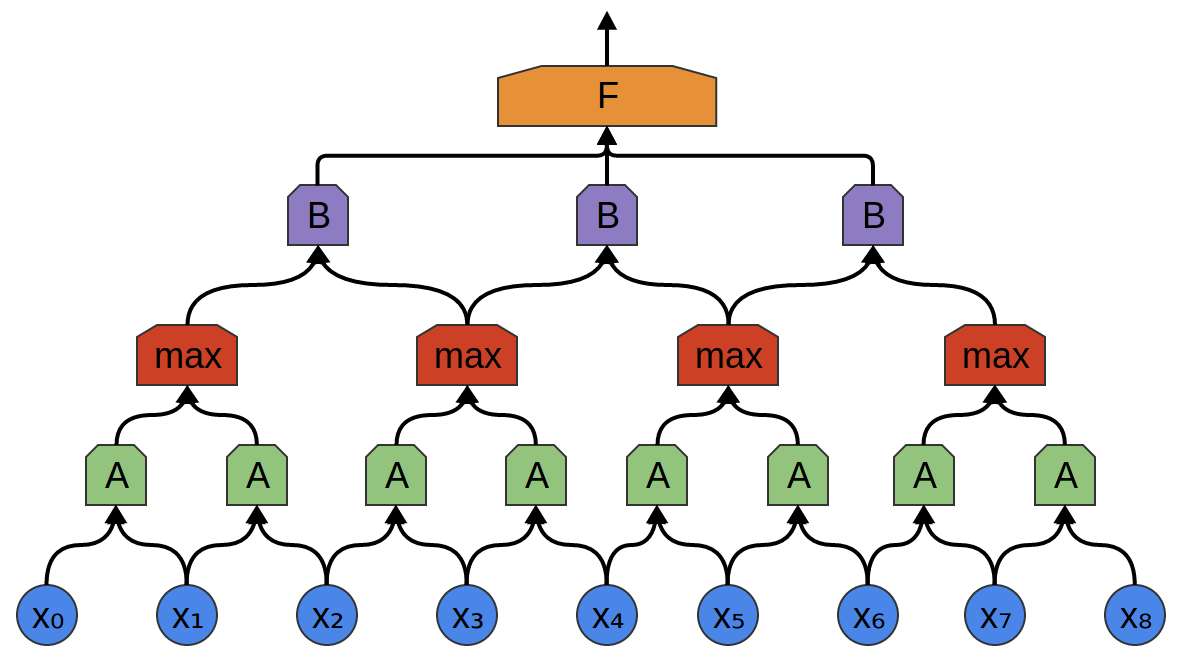{width=500px} 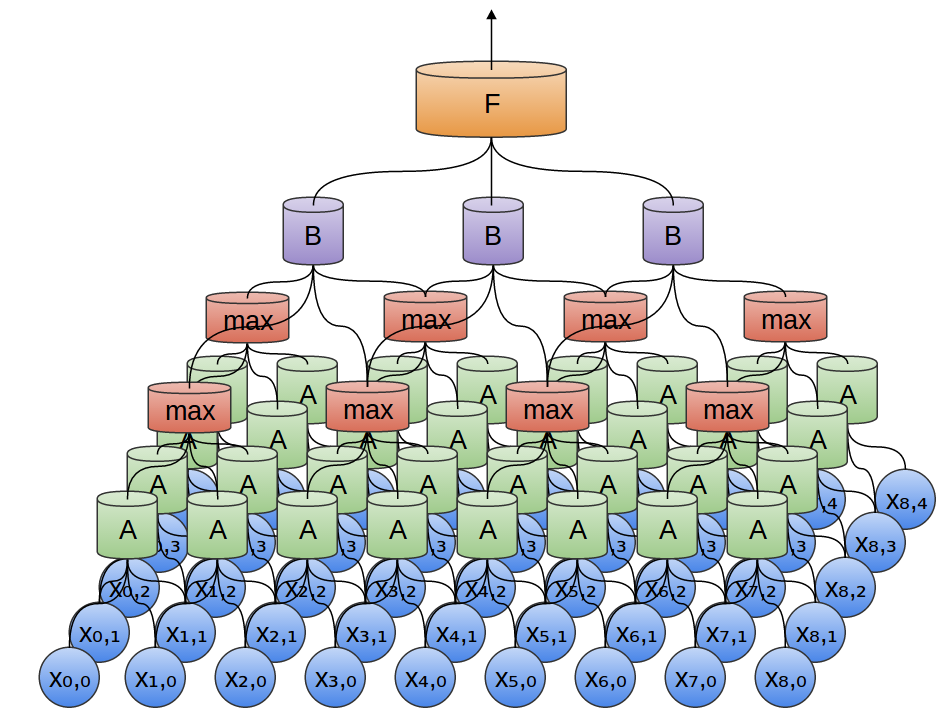{width=500px}
{width=700px}
## Example: handwritten digit recognition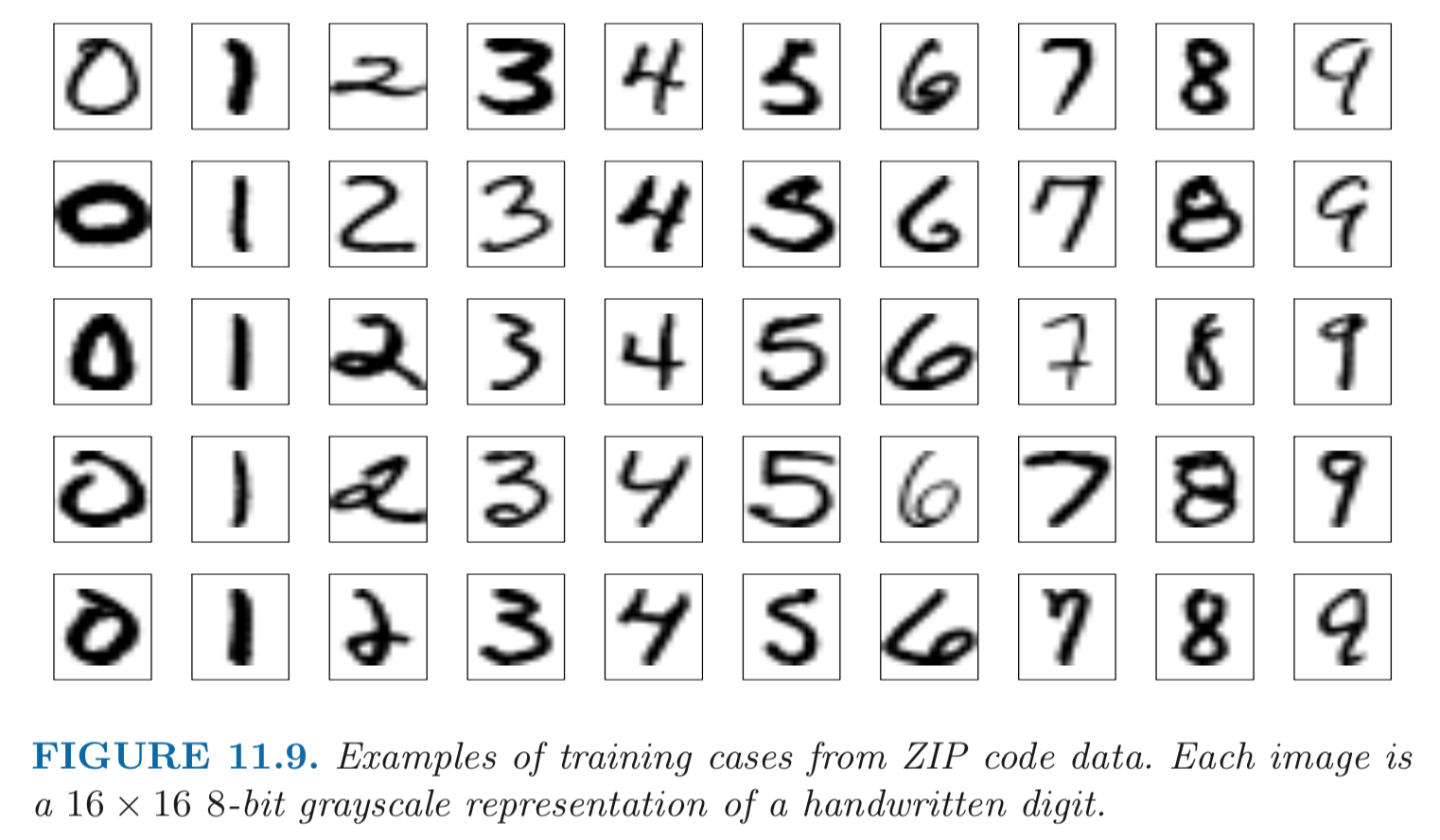{width=500px}
- Input: 256 pixel values from $16 \times 16$ grayscale images. Output: 0, 1, ..., 9 10 class-classification. - A modest experiment subset: 320 training digits and 160 testing digits. - net-1: no hidden layer, equivalent to multinomial logistic regression. net-2: one hidden layer, 12 hidden units fully connected. net-3: two hidden layers locally connected. net-4: two hidden layers, locally connected with weight sharing. net-5: two hidden layers, locally connected, two levels of weight sharing (was the result of many person years of experimentation).{width=500px}
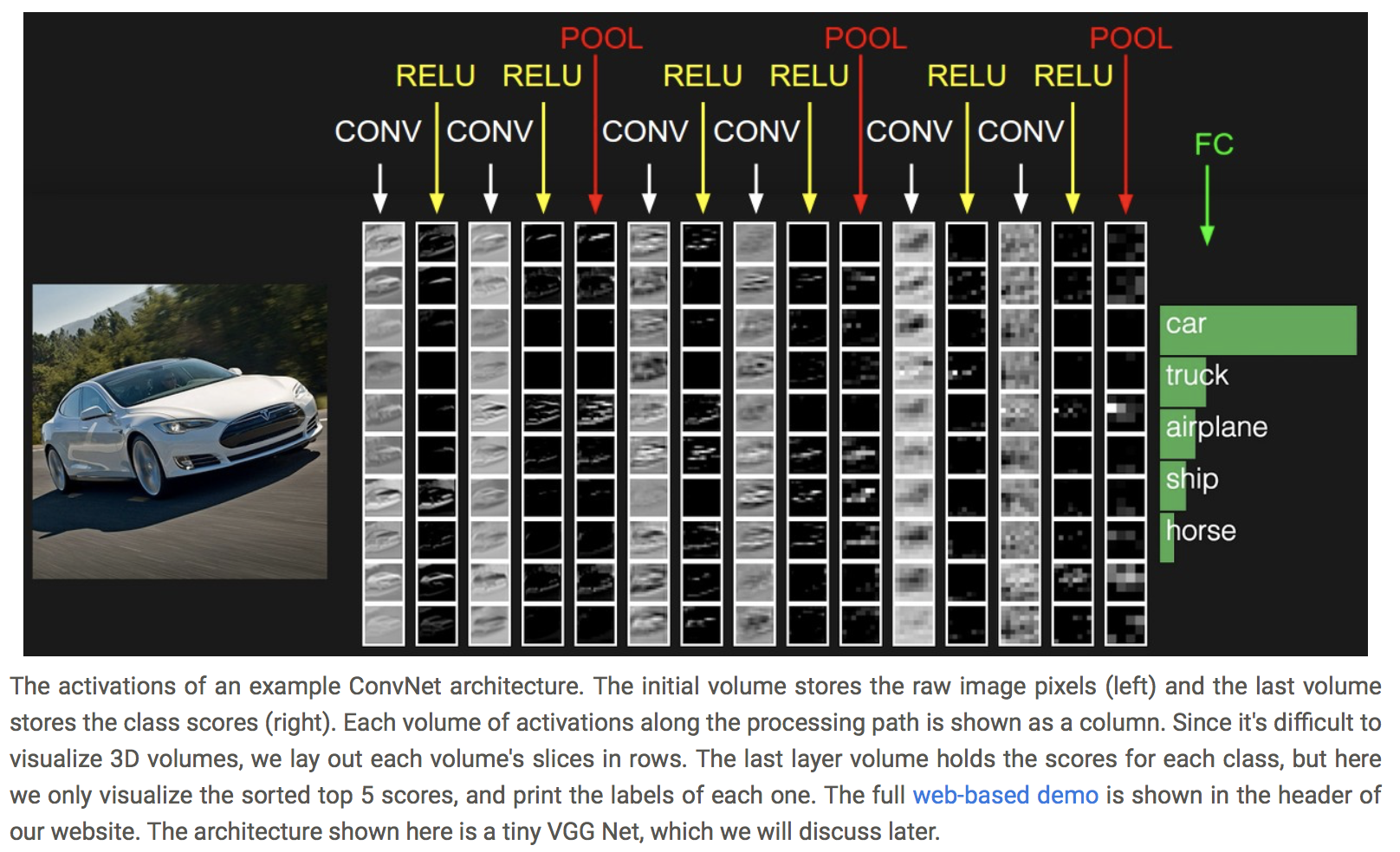
- Results: | network | links | weights | accuracy | |---------|-------|---------|----------| | net 1 | 2570 | 2570 | 80.0% | | net 2 | 3124 | 3214 | 87.0% | | net 3 | 1226 | 1226 | 88.5% | | net 4 | 2266 | 1131 | 94.0% | | net 5 | 5194 | 1060 | 98.4% | Net-5 and similar networks were start-of-the-art in early 1990s. - On the larger benchmark dataset **MNIST** (60,000 training images, 10,000 testing images), accuracies of following methods were reported: | Method | Error rate | |--------|----------| | tangent distance with 1-nearest neighbor classifier | 1.1% | | degree-9 polynomial SVM | 0.8% | | LeNet-5 | 0.8% | | boosted LeNet-4 | 0.7% | ## Example: image classification Source: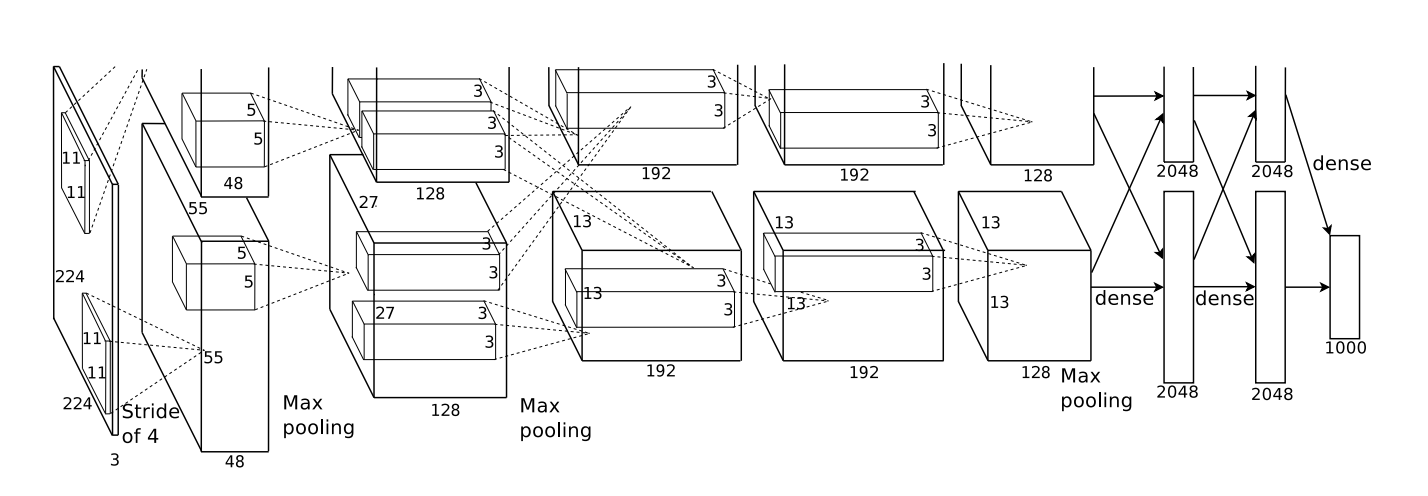{width=500px}
- Achieved 63% accuracy: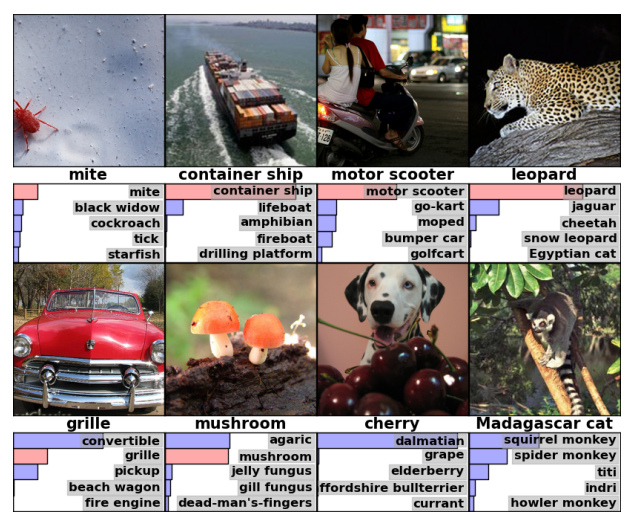{width=500px}
96 learnt filters: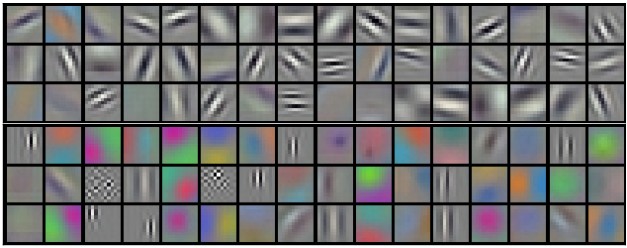{width=500px}
## Recurrent neural networks (RNN) Souces: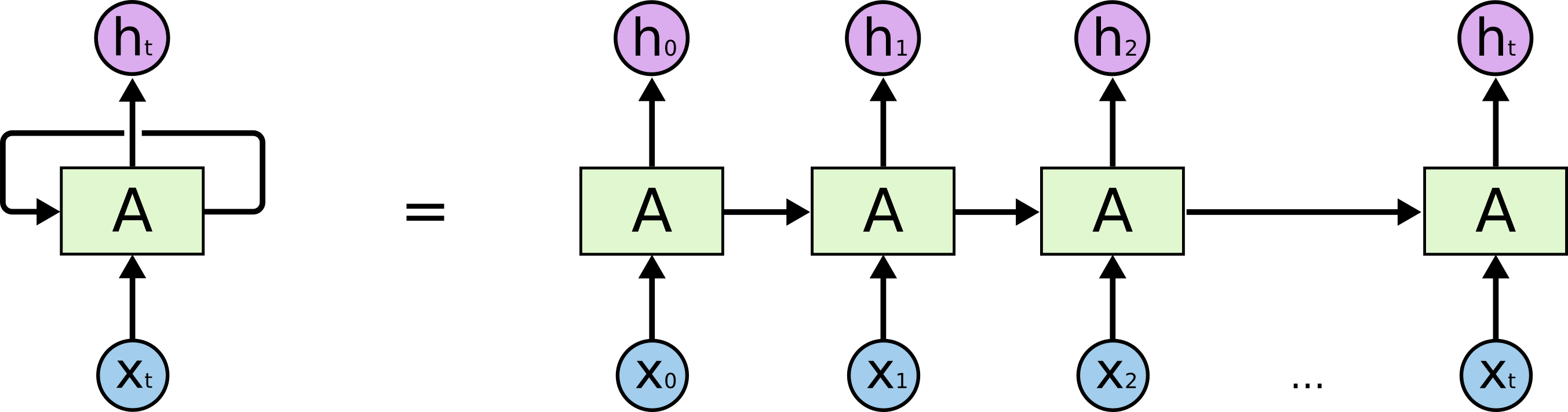{width=500px}
- RNNs allow us to operate over sequences of vectors: sequences in the input, the output, or in the most general case both. - Applications of RNN: - [Language modeling and generating text](http://karpathy.github.io/2015/05/21/rnn-effectiveness/). E.g., search prompt, messaging prompt, ...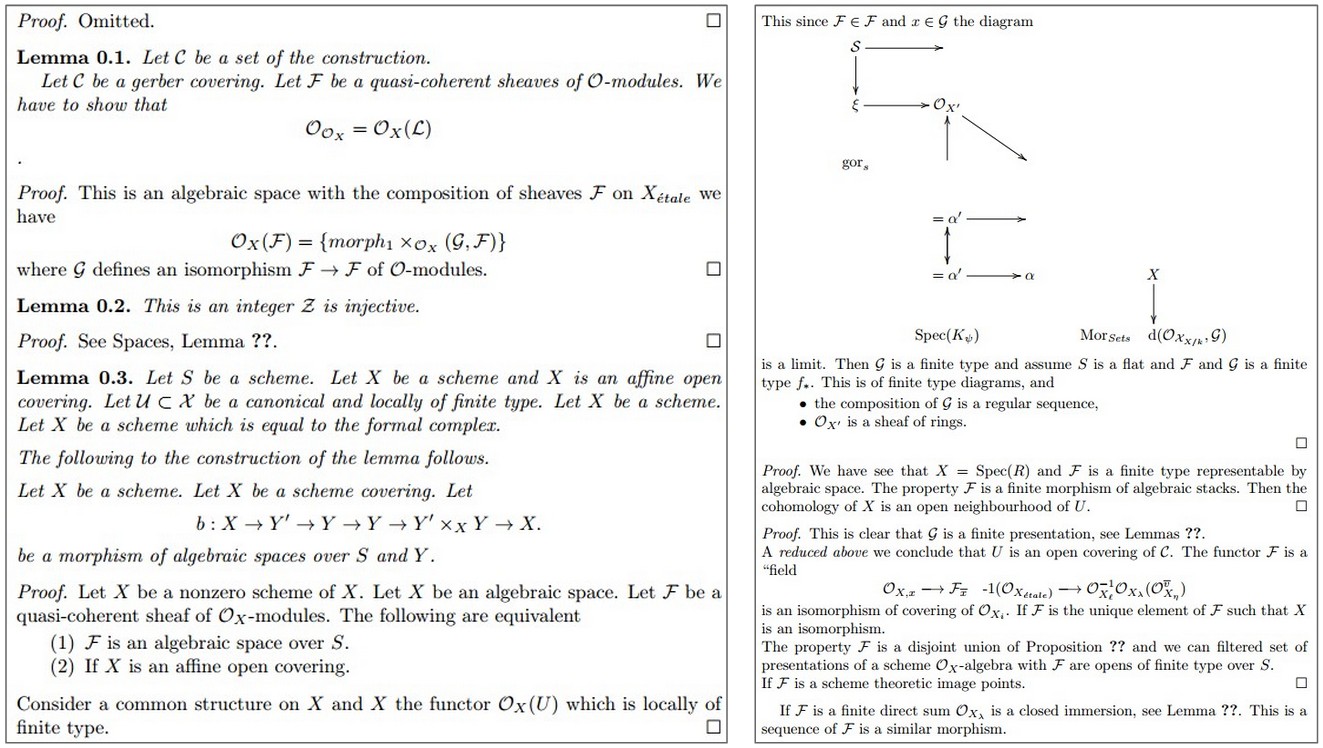{width=500px}
Above: generated (fake) LaTeX on algebraic geometry; see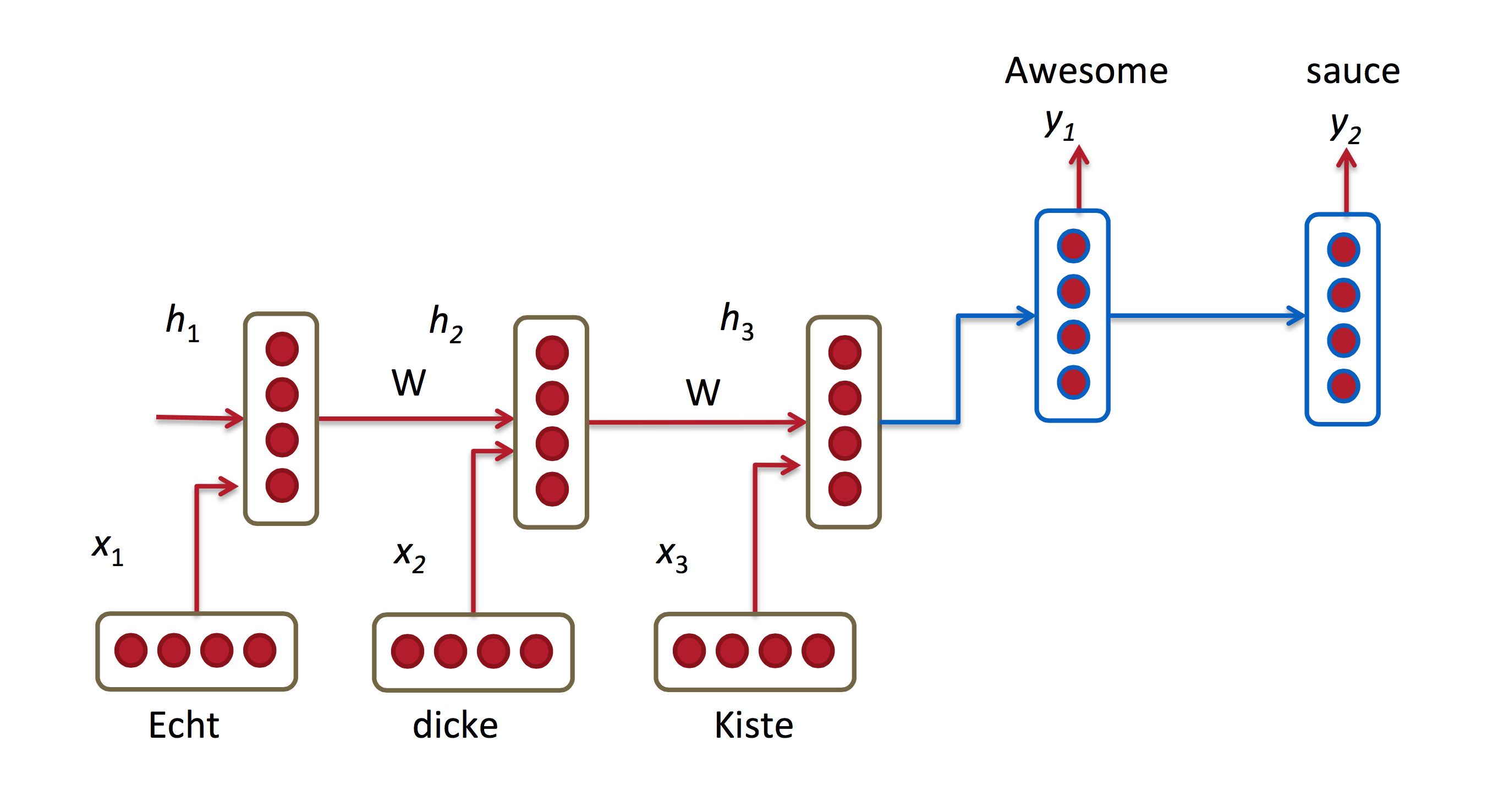{width=500px}
- **Computer vision**: image captioning, video captioning, ...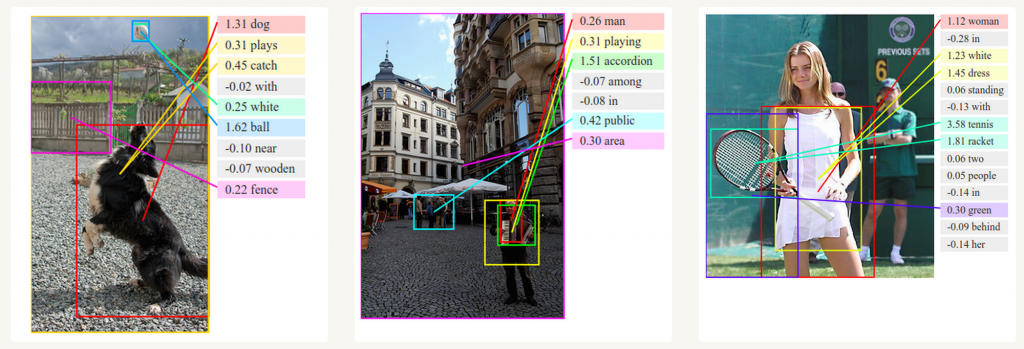{width=500px}
- RNNs accept an input vector $x$ and give you an output vector $y$. However, crucially this output vector’s contents are influenced not only by the input you just fed in, but also on the entire history of inputs you’ve fed in the past. - Short-term dependencies: to predict the last word in "the clouds are in the _sky_":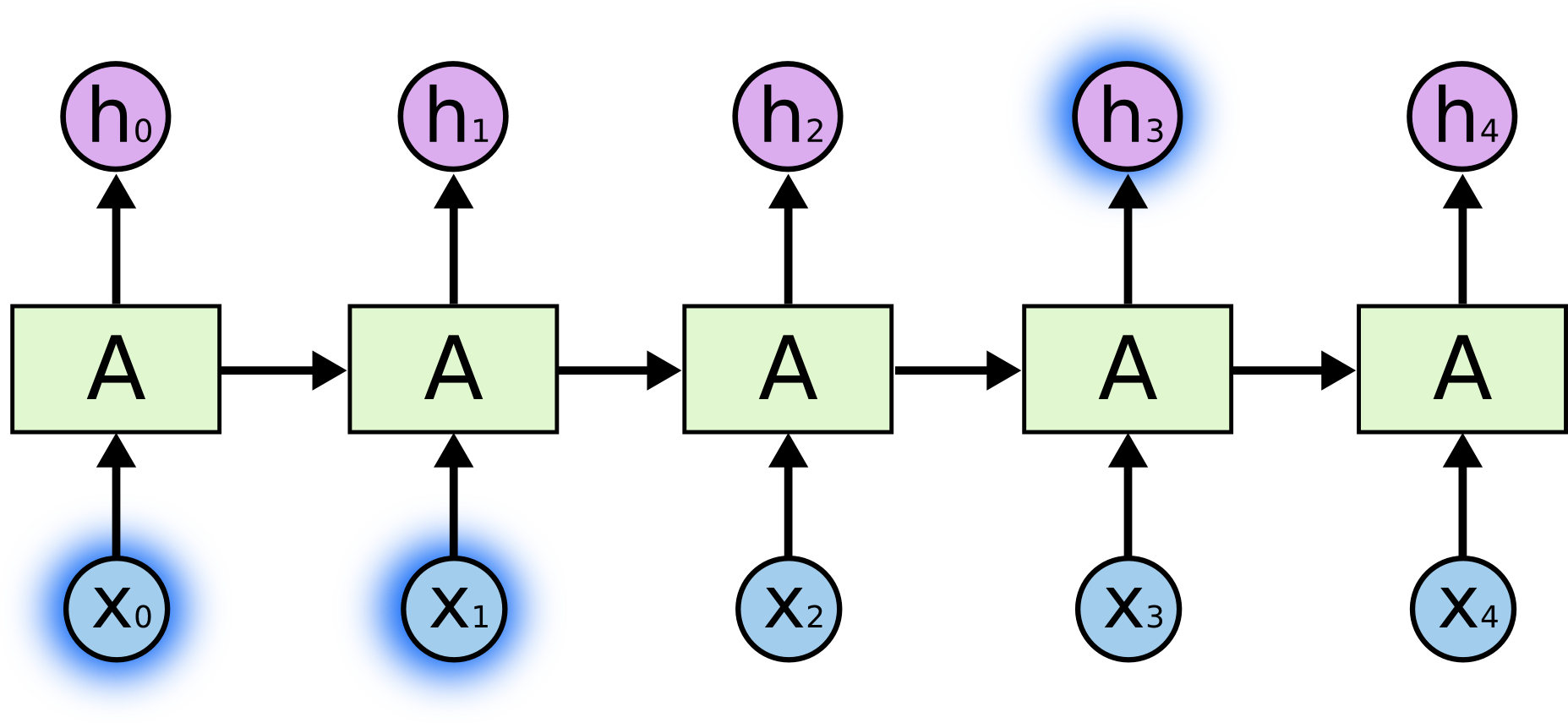{width=500px}
- Long-term dependencies: to predict the last word in "I grew up in France... I speek fluent _French_":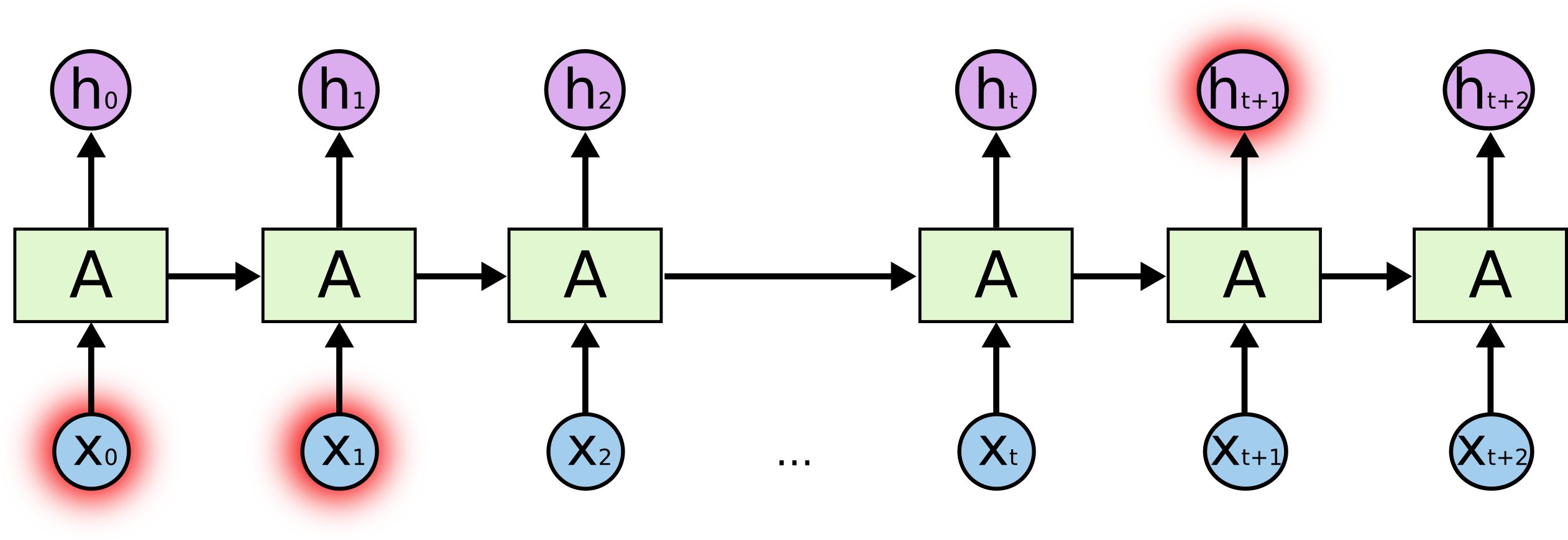{width=500px}
- Typical RNNs are having trouble with learning long-term dependencies.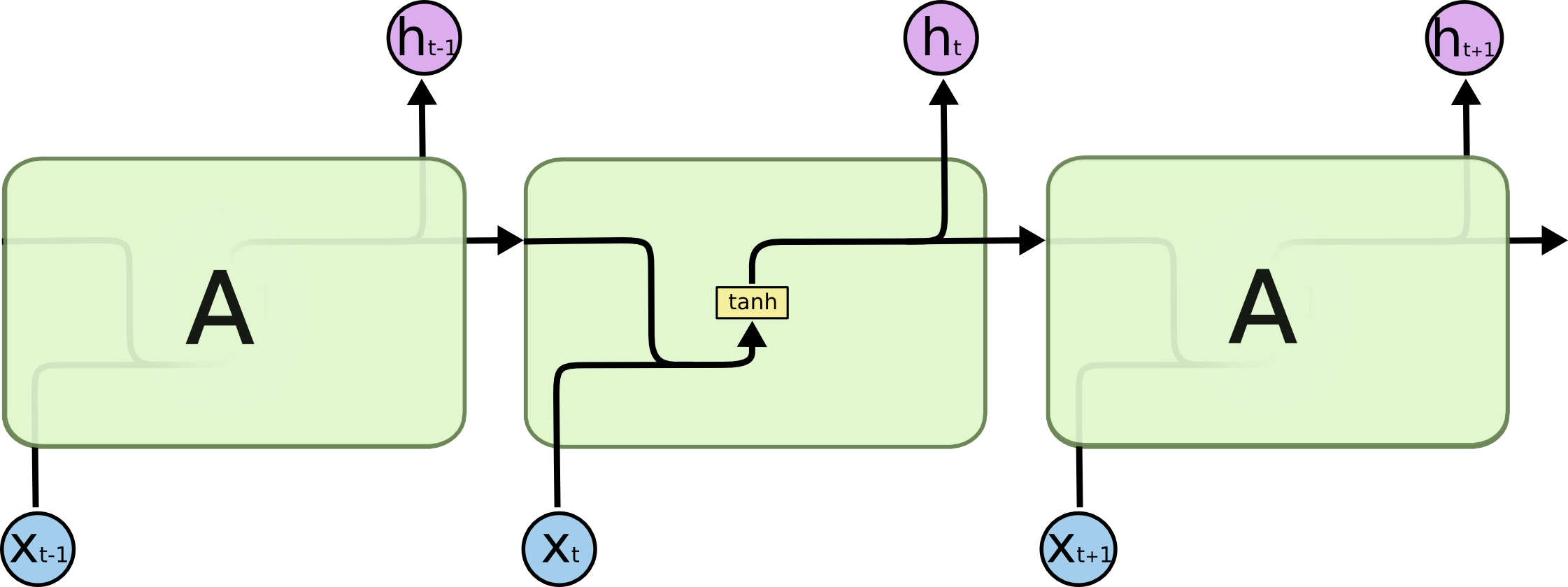{width=500px}
- **Long Short-Term Memory networks (LSTM)** are a special kind of RNN capable of learning long-term dependencies.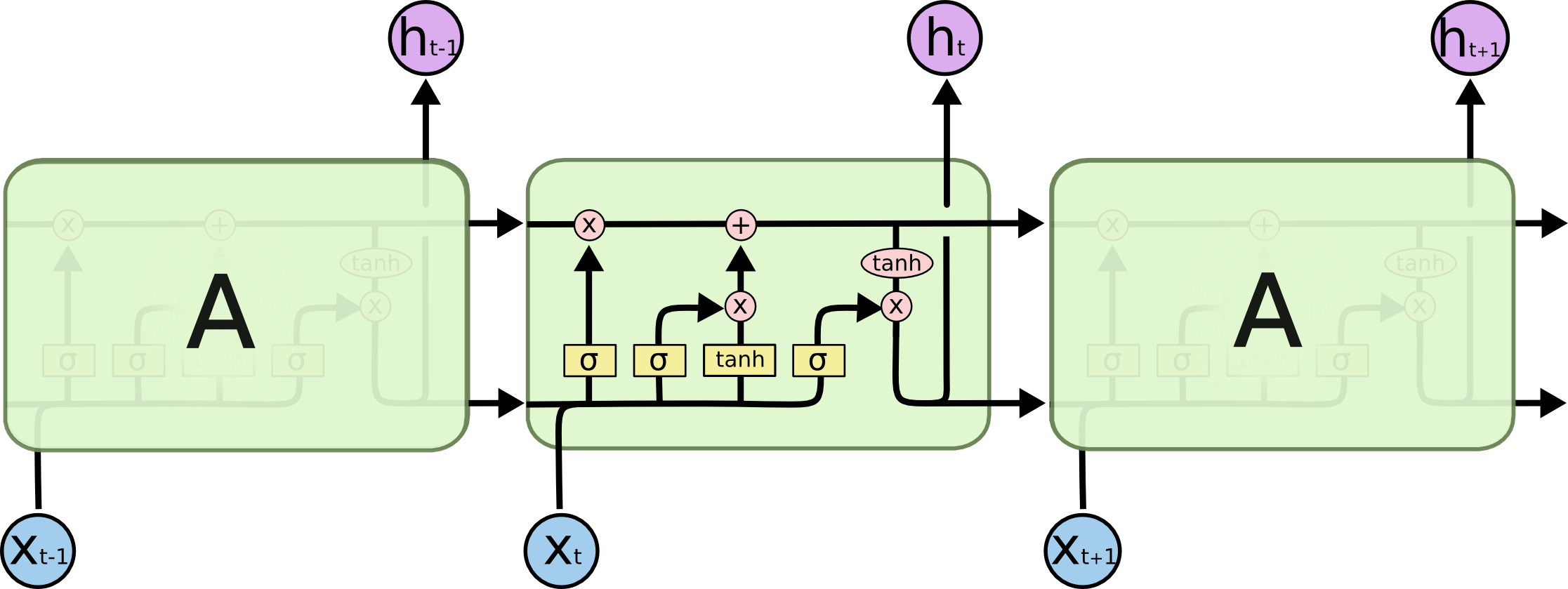{width=500px} {width=500px}
The **cell state** allows information to flow along it unchanged.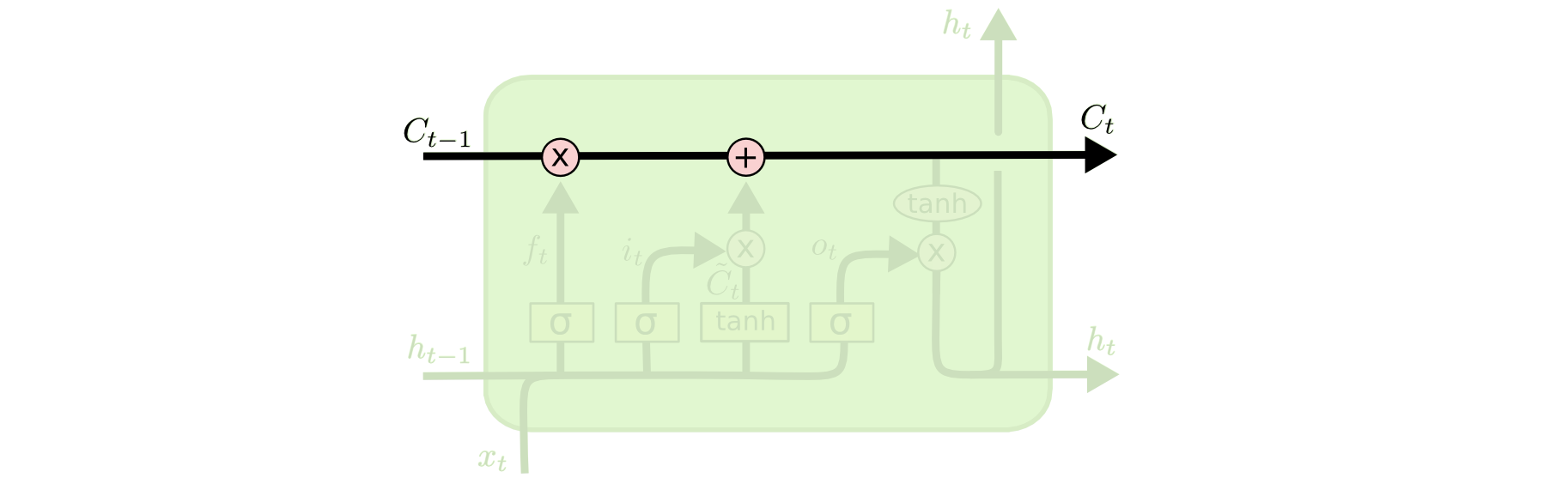{width=500px}
The **gates** give the ability to remove or add information to the cell state.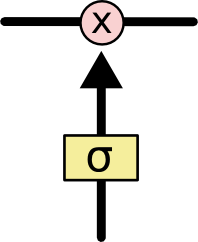{width=100px}
## Generative Adversarial Networks (GANs) Souces: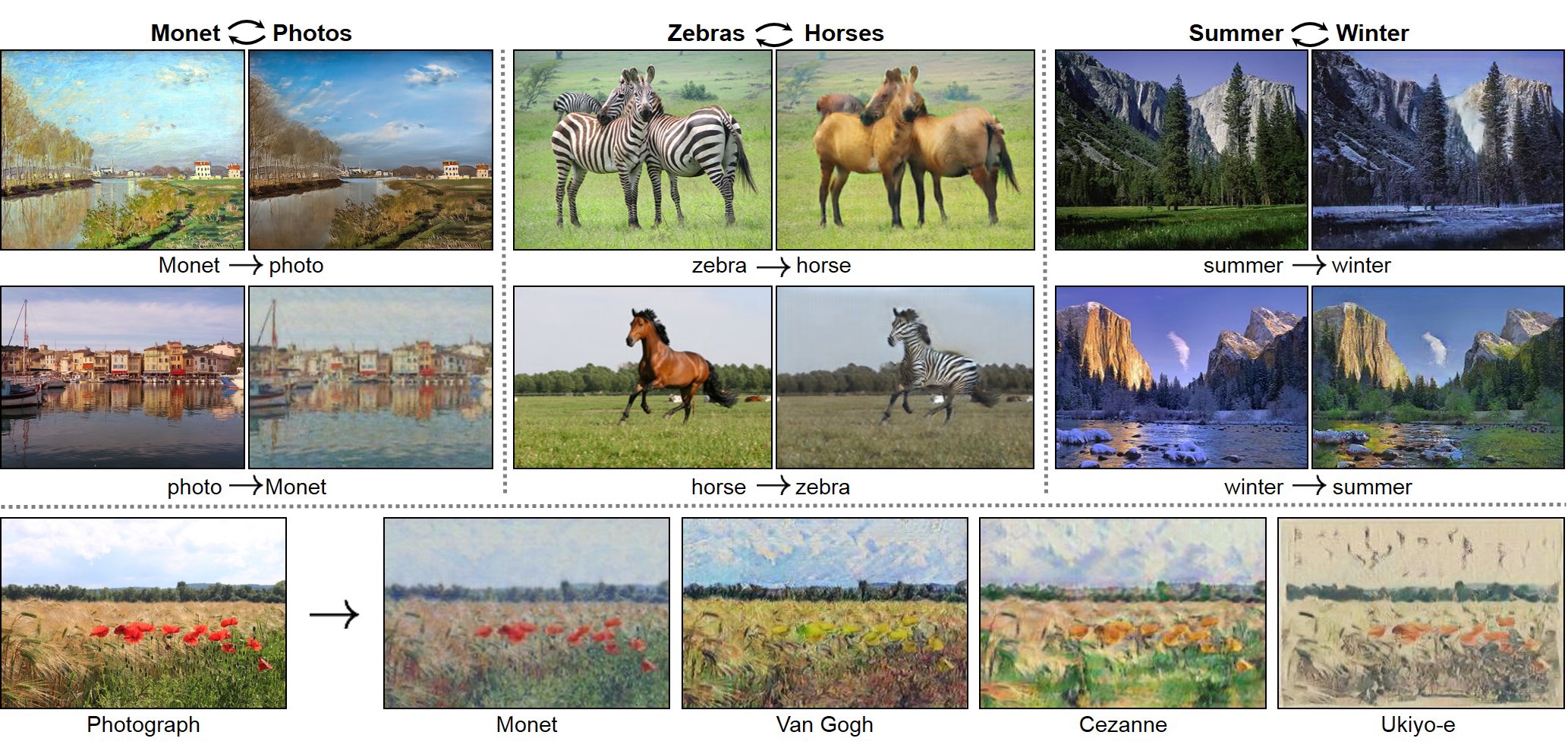{width=600px}
* AI-generated celebrity photos: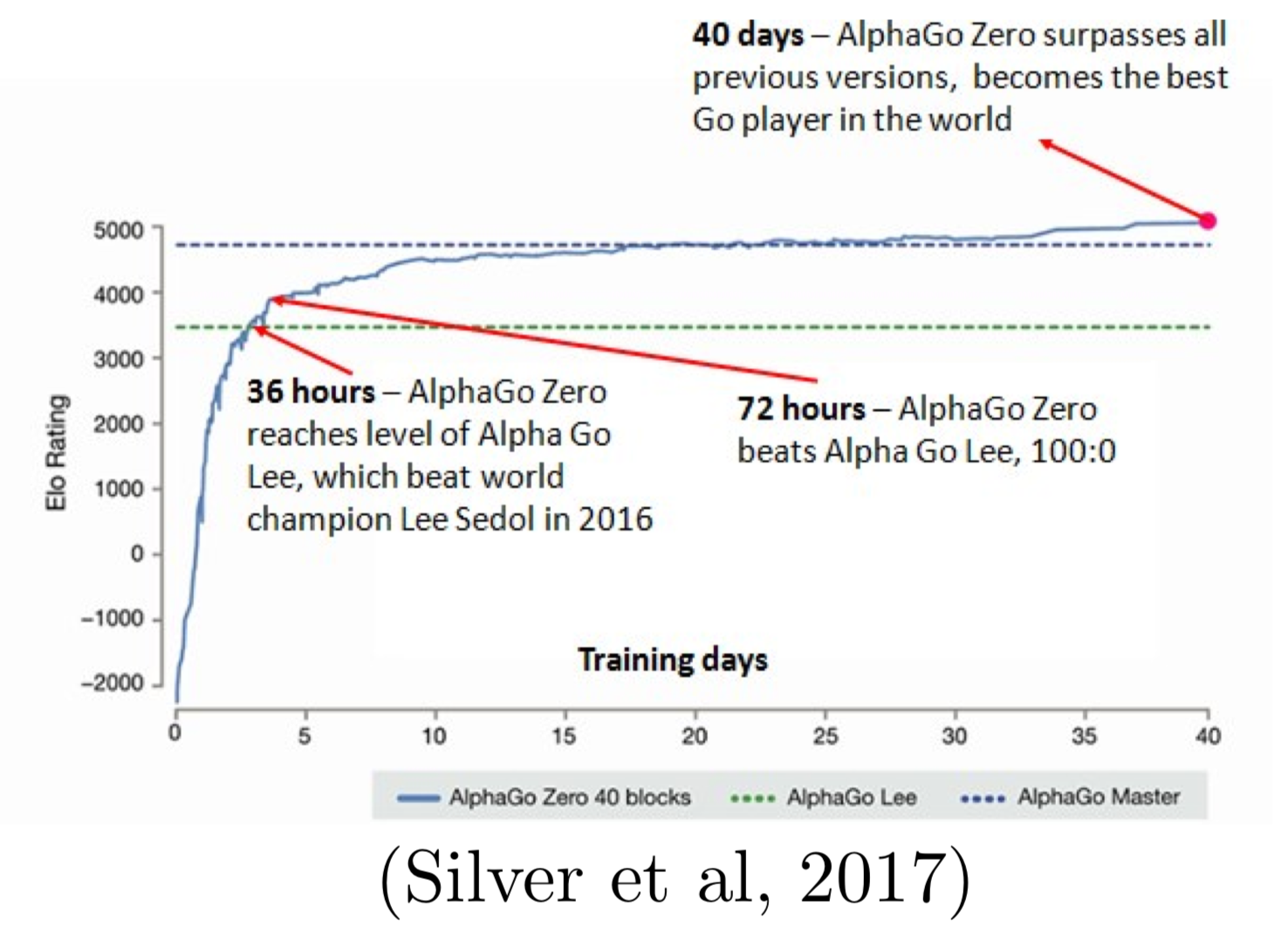{width=600px}
* GAN: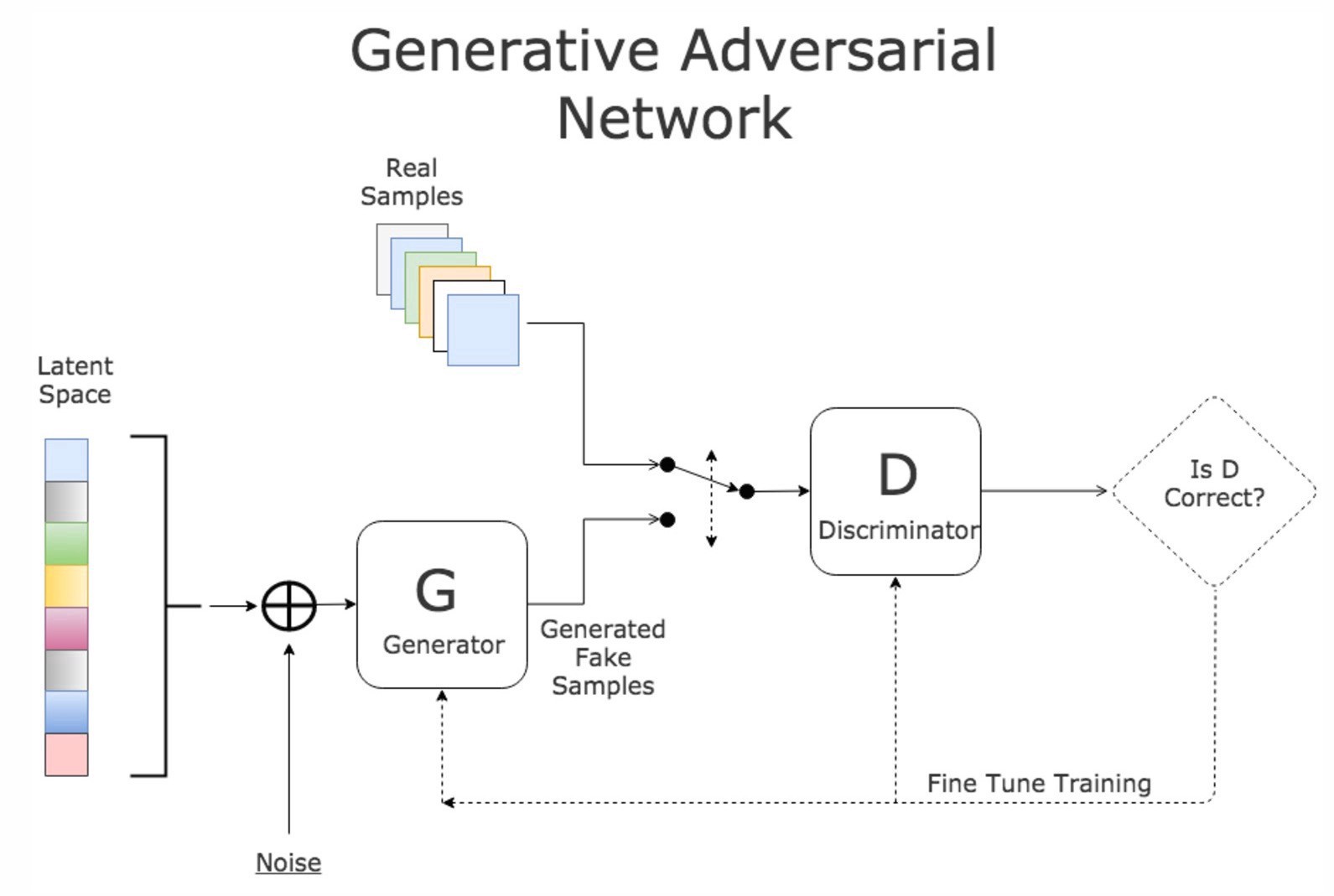{width=600px}
* Value function of GAN $$ \min_G \max_D V(D, G) = \mathbb{E}_{x \sim p_{\text{data}}(x)} [\log D(x)] + \mathbb{E}_{z \sim p_z(z)} [\log (1 - D(G(z)))]. $$ * Training GAN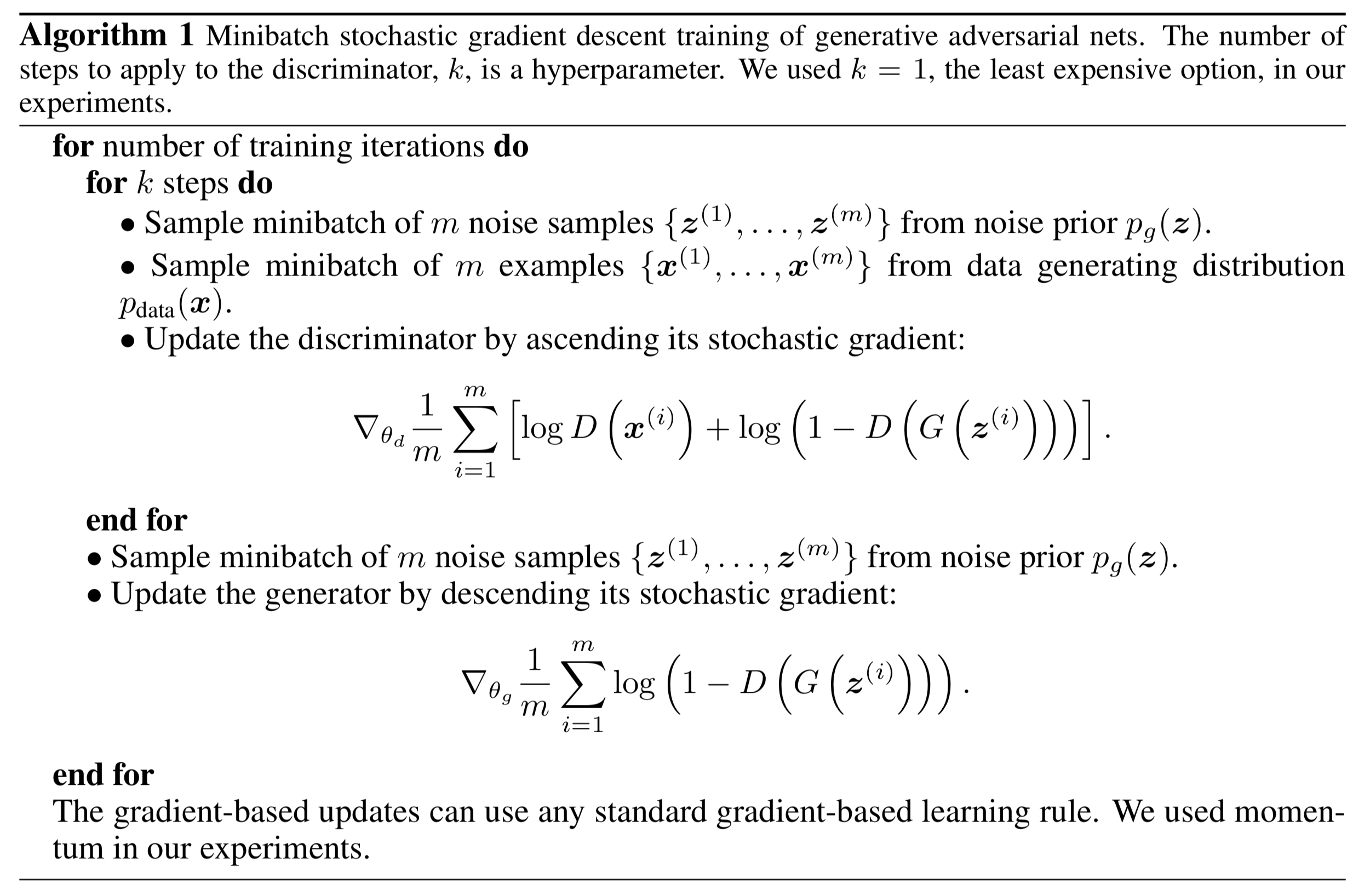{width=600px}