Loading...
Searching...
No Matches
topology/cubical-complex-collapse.cpp
Collapse of 3D cubical complex that is made of 20x20x20 voxels with their faces. Fixed cells were marked in red. It was the eight vertices, plus all border linels on the upper faces plus a random linel within the complex. The priority was the distance to the diagonal. Note that the Euler characteristic of the complex is unchanged after collapse.
* $ ./examples/topology/cubical-complex-collapse * New Block [Creating Cubical Complex] * After close: [CubicalComplex dim=3 chi=1 #0=9261 #1=26460 #2=25200 #3=8000] * EndBlock [Creating Cubical Complex] (12.088 ms) * New Block [Collapsing complex] * [CC::collapse]-+ tag collapsible elements... 68756 found. * [CC::collapse]-+ entering collapsing loop. * [CC::collapse]---+ Pass 1, Card(PQ)=68921 elements, nb_exam=0 * [CC::collapse]---+ Pass 2, Card(PQ)=16219 elements, nb_exam=68921 * [CC::collapse]---+ Pass 3, Card(PQ)=7956 elements, nb_exam=85140 * [CC::collapse]---+ Pass 4, Card(PQ)=36 elements, nb_exam=93096 * [CC::collapse]-+ cleaning complex. * Collapse removed 64066 cells. * After collapse: [CubicalComplex dim=2 chi=1 #0=1268 #1=2427 #2=1160 #3=0] * EndBlock [Collapsing complex] (162.069 ms) * $ *
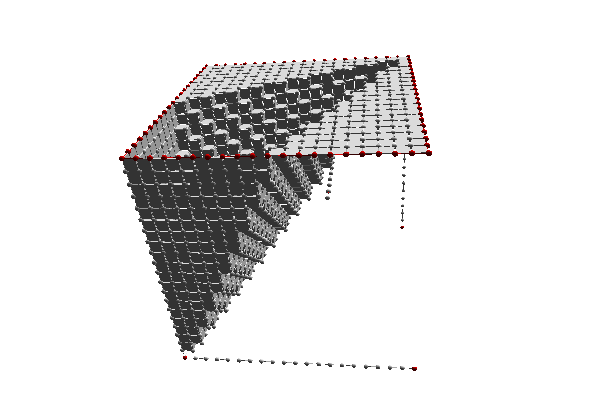
Collapse of a cubical complex made of 20x20x20 voxels with some cells marked as fixed (in red).
#include <iostream>
#include <map>
#include "DGtal/base/Common.h"
#include "DGtal/helpers/StdDefs.h"
#include "DGtal/io/viewers/PolyscopeViewer.h"
#include "DGtal/topology/KhalimskySpaceND.h"
#include "DGtal/topology/CubicalComplex.h"
using namespace std;
using namespace DGtal;
using namespace DGtal::Z3i;
template <typename CubicalComplex>
{
double d1 = Point::diagonal( 1 ).dot( k1 ) / sqrt( (double) KSpace::dimension );
double d2 = Point::diagonal( 1 ).dot( k2 ) / sqrt( (double) KSpace::dimension );;
RealPoint v1( k1[ 0 ] - d1 * k1[ 0 ], k1[ 1 ] - d1 * k1[ 1 ], k1[ 2 ] - d1 * k1[ 2 ] );
RealPoint v2( k2[ 0 ] - d2 * k2[ 0 ], k2[ 1 ] - d2 * k2[ 1 ], k2[ 2 ] - d2 * k2[ 2 ] );
double n2 = v2.dot( v2 );
return ( n1 < n2 ) || ( ( n1 == n2 ) && ( it1->first < it2->first ) );
}
};
{
// JOL: unordered_map is approximately twice faster than map for
// collapsing.
// typedef boost::unordered_map<Cell, CubicalCellData> Map;
Integer m = 40;
std::vector<Cell> S;
for ( Integer x = 0; x <= m; ++x )
for ( Integer y = 0; y <= m; ++y )
for ( Integer z = 0; z <= m; ++z )
{
S.push_back( K.uCell( k1 ) );
double d1 = Point::diagonal( 1 ).dot( k1 ) / (double) KSpace::dimension; // sqrt( (double) KSpace::dimension );
RealPoint v1( k1[ 0 ], k1[ 1 ], k1[ 2 ] );
v1 -= d1 * RealPoint::diagonal( 1.0 );
//RealPoint v1( k1[ 0 ] - d1 * k1[ 0 ], k1[ 1 ] - d1 * k1[ 1 ], k1[ 2 ] - d1 * k1[ 2 ] );
double n1 = v1.norm();
bool fixed = ( ( x == 0 ) && ( y == 0 ) && ( z == 0 ) )
|| ( ( x == 0 ) && ( y == m ) && ( z == 0 ) )
|| ( ( x == m ) && ( y == 0 ) && ( z == 0 ) )
|| ( ( x == m ) && ( y == m ) && ( z == 0 ) )
|| ( ( x == m/3 ) && ( y == 2*m/3 ) && ( z == 2*m/3 ) )
|| ( ( x == 0 ) && ( y == 0 ) && ( z == m ) )
|| ( ( x == 0 ) && ( y == m ) && ( z == m ) )
|| ( ( x == m ) && ( y == 0 ) && ( z == m ) )
|| ( ( x == m ) && ( y == m ) && ( z == m ) )
|| ( ( x == 0 ) && ( y == m ) )
|| ( ( x == m ) && ( y == m ) )
|| ( ( z == 0 ) && ( y == m ) )
|| ( ( z == m ) && ( y == m ) );
complex.insertCell( S.back(),
fixed ? CC::FIXED
);
}
//complex.close();
// for 3D display with PolyscopeViewer
{
for ( Dimension d = 0; d <= 3; ++d )
for ( CellMapConstIterator it = complex.begin( d ), itE = complex.end( d );
it != itE; ++it )
{
bool fixed = (it->second.data == CC::FIXED);
if ( fixed ) viewer.drawColor( Color::Red );
else viewer.drawColor( Color::White );
viewer << it->first;
}
viewer.show();
}
CC::DefaultCellMapIteratorPriority P;
DGtal::uint64_t removed
= functions::collapse( complex, S.begin(), S.end(), P, true, true, true );
{
typedef CC::CellMapConstIterator CellMapConstIterator;
for ( Dimension d = 0; d <= 3; ++d )
for ( CellMapConstIterator it = complex.begin( d ), itE = complex.end( d );
it != itE; ++it )
{
bool fixed = (it->second.data == CC::FIXED);
if ( fixed ) viewer.drawColor( Color::Red );
else viewer.drawColor( Color::White );
viewer << it->first;
}
viewer.show();
return 0;
}
}
Aim: This class represents an arbitrary cubical complex living in some Khalimsky space....
Definition CubicalComplex.h:176
const KSpace & space() const
auto dot(const PointVector< dim, OtherComponent, OtherStorage > &v) const -> decltype(DGtal::dotProduct(*this, v))
Dot product with a PointVector.
Definition PolyscopeViewer.h:56
void beginBlock(const std::string &keyword="")
std::ostream & info()
double endBlock()
Definition testClone2.cpp:346
Z3i this namespace gathers the standard of types for 3D imagery.
DGtal is the top-level namespace which contains all DGtal functions and types.
Definition ClosedIntegerHalfPlane.h:49
Trace trace
STL namespace.
bool operator()(const CellMapIterator &it1, const CellMapIterator &it2) const
Definition cubical-complex-collapse.cpp:97
const CubicalComplex & myComplex
Definition cubical-complex-collapse.cpp:110
CubicalComplex::CellMapIterator CellMapIterator
Definition cubical-complex-collapse.cpp:94
CC::CellMapConstIterator CellMapConstIterator
Definition testCubicalComplex.cpp:59