|
CMSIS-RTOS RTX
Version 4.51
CMSIS-RTOS RTX: Real-Time Operating System for Cortex-M processor-based devices
|
|
CMSIS-RTOS RTX
Version 4.51
CMSIS-RTOS RTX: Real-Time Operating System for Cortex-M processor-based devices
|
This section explains how to create a simple application with the CMSIS-RTOS RTX kernel.
The directory Templates contains CMSIS-RTOS RTX templates for every supported compiler and every supported Cortex-M processor.
| File or Directory | Content |
|---|---|
| main.c | Template for a CMSIS-RTOS RTX main thread function. |
| RTX_Conf_CM.c | Configuration File for CMSIS-RTOS RTX. Refer to Configuration of CMSIS-RTOS RTX for more information. |
| .\CM0 | Template project files for Cortex-M0 and Cortex-M1 processor. |
| .\CM3 | Template project files for Cortex-M3 and Cortex-M4 without FPU processor. |
| .\CM4 | Template project files for Cortex-M4 with FPU processor. |
| .\CMx\ARM | Template project files for ARMCC Compiler. |
| .\CMx\G++ | Template project files for CodeSoucery G++ Compiler. |
| .\CMx\GCC | Template project files for GCC Compiler. |
| .\CMx\IAR | Template project files for IAR Compiler. |
Each template project file shows the basic configuration and the usage of the CMSIS-RTOS RTX Library and Configuration File. You may directly load this project templates with Keil MDK or IAR EW-ARM.
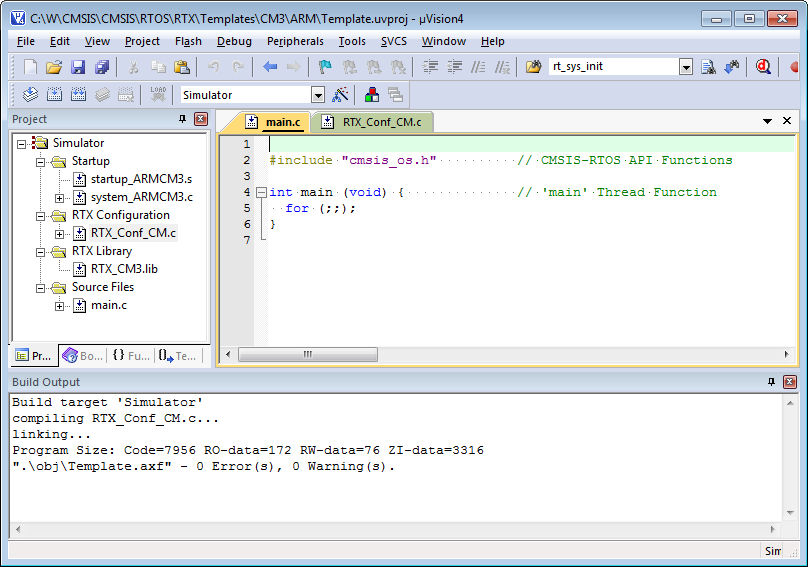
The file main.c is the very minimal valid CMSIS-RTOS file and contains simply just a 'main' function that is executed as a thread.
The example project provided in .\Examples\RTX_ex1 shows the usage of:
The example project provided in .\Examples\RTX_ex2 shows in addition to the features demonstrated in RTX_ex1 the usage of:

