# SelaVPR
🆕 **[Feb 2026]** The code and models for **SelaVPR++** have been released in a separate [repository](https://github.com/Lu-Feng/SelaVPRplusplus).
This is the official repository for the ICLR 2024 paper "[Towards Seamless Adaptation of Pre-trained Models for Visual Place Recognition](https://openreview.net/pdf?id=TVg6hlfsKa)".
 ## Summary
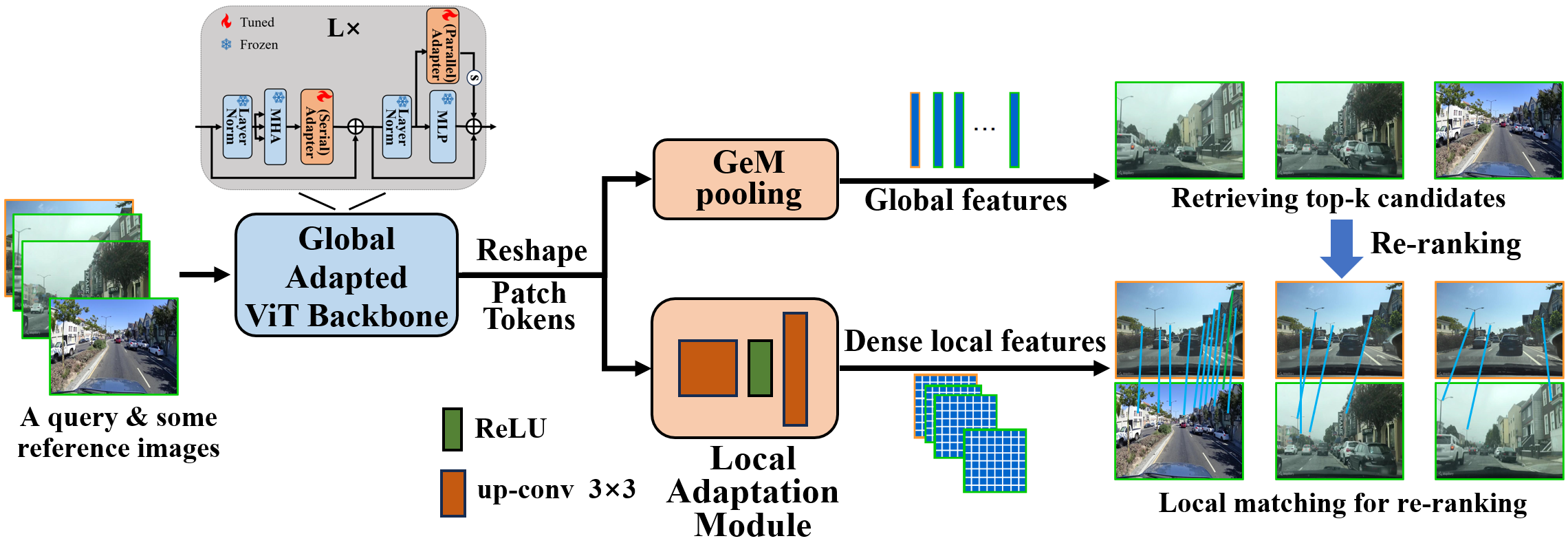
This paper presents a novel method to realize **Se**am**l**ess **a**daptation of pre-trained foundation models for the (two-stage) VPR task, named **SelaVPR**. By adding a few tunable lightweight adapters to the frozen pre-trained model, we achieve an efficient hybrid global-local adaptation to get both global features for retrieving candidate places and dense local features for re-ranking. The SelaVPR feature representation can focus on discriminative landmarks, thus closing the gap between the pre-training and VPR tasks (fully unleash the capability of pre-trained models for VPR). SelaVPR can directly match the local features without spatial verification, making the re-ranking much faster.
The global adaptation is achieved by adding adapters after the multi-head attention layer and in parallel to the MLP layer in each transformer block (see adapter1 and adapter2 in `/backbone/dinov2/block.py`).
The local adaptation is implemented by adding up-convolutional layers after the entire ViT backbone to upsample the feature map and get dense local features (see LocalAdapt in `network.py`).
## Getting Started
This repo follows the [Visual Geo-localization Benchmark](https://github.com/gmberton/deep-visual-geo-localization-benchmark). You can refer to it ([VPR-datasets-downloader](https://github.com/gmberton/VPR-datasets-downloader)) to prepare datasets.
The dataset should be organized in a directory tree as such:
```
├── datasets_vg
└── datasets
└── pitts30k
└── images
├── train
│ ├── database
│ └── queries
├── val
│ ├── database
│ └── queries
└── test
├── database
└── queries
```
Before training, you should download the pre-trained foundation model DINOv2(ViT-L/14) [HERE](https://dl.fbaipublicfiles.com/dinov2/dinov2_vitl14/dinov2_vitl14_pretrain.pth).
## Train
Finetuning on MSLS
```
python3 train.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=msls --queries_per_epoch=30000 --foundation_model_path=/path/to/pre-trained/dinov2_vitl14_pretrain.pth
```
Further finetuning on Pitts30k
```
python3 train.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=pitts30k --queries_per_epoch=5000 --resume=/path/to/finetuned/msls/model/SelaVPR_msls.pth
```
## Trained Models
The model finetuned on MSLS (for diverse scenes).
## Summary
This paper presents a novel method to realize **Se**am**l**ess **a**daptation of pre-trained foundation models for the (two-stage) VPR task, named **SelaVPR**. By adding a few tunable lightweight adapters to the frozen pre-trained model, we achieve an efficient hybrid global-local adaptation to get both global features for retrieving candidate places and dense local features for re-ranking. The SelaVPR feature representation can focus on discriminative landmarks, thus closing the gap between the pre-training and VPR tasks (fully unleash the capability of pre-trained models for VPR). SelaVPR can directly match the local features without spatial verification, making the re-ranking much faster.
The global adaptation is achieved by adding adapters after the multi-head attention layer and in parallel to the MLP layer in each transformer block (see adapter1 and adapter2 in `/backbone/dinov2/block.py`).
The local adaptation is implemented by adding up-convolutional layers after the entire ViT backbone to upsample the feature map and get dense local features (see LocalAdapt in `network.py`).
## Getting Started
This repo follows the [Visual Geo-localization Benchmark](https://github.com/gmberton/deep-visual-geo-localization-benchmark). You can refer to it ([VPR-datasets-downloader](https://github.com/gmberton/VPR-datasets-downloader)) to prepare datasets.
The dataset should be organized in a directory tree as such:
```
├── datasets_vg
└── datasets
└── pitts30k
└── images
├── train
│ ├── database
│ └── queries
├── val
│ ├── database
│ └── queries
└── test
├── database
└── queries
```
Before training, you should download the pre-trained foundation model DINOv2(ViT-L/14) [HERE](https://dl.fbaipublicfiles.com/dinov2/dinov2_vitl14/dinov2_vitl14_pretrain.pth).
## Train
Finetuning on MSLS
```
python3 train.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=msls --queries_per_epoch=30000 --foundation_model_path=/path/to/pre-trained/dinov2_vitl14_pretrain.pth
```
Further finetuning on Pitts30k
```
python3 train.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=pitts30k --queries_per_epoch=5000 --resume=/path/to/finetuned/msls/model/SelaVPR_msls.pth
```
## Trained Models
The model finetuned on MSLS (for diverse scenes).
DOWNLOAD
|
MSLS-val |
Nordland-test |
St. Lucia |
| R@1 |
R@5 |
R@10 |
R@1 |
R@5 |
R@10 |
R@1 |
R@5 |
R@10 |
| LINK
| 90.8 |
96.4 |
97.2 |
85.2 |
95.5 |
98.5 |
99.8 |
100.0 |
100.0 |
The model further finetuned on Pitts30k (only for urban scenes).
DOWNLOAD
|
Tokyo24/7 |
Pitts30k |
Pitts250k |
| R@1 |
R@5 |
R@10 |
R@1 |
R@5 |
R@10 |
R@1 |
R@5 |
R@10 |
| LINK
| 94.0 |
96.8 |
97.5 |
92.8 |
96.8 |
97.7 |
95.7 |
98.8 |
99.2 |
## Test
Set `rerank_num=100` to reproduce the results in paper, and set `rerank_num=20` to achieve a close result with only 1/5 re-ranking runtime (0.018s for a query).
```
python3 eval.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=pitts30k --resume=/path/to/finetuned/pitts30k/model/SelaVPR_pitts30k.pth --rerank_num=100
```
### Local Matching using DINOv2+Registers
By adding registers, DINOv2 can achieve better local matching performance. A pre-trained DINOv2+registers model can be downloaded [HERE](https://dl.fbaipublicfiles.com/dinov2/dinov2_vitl14/dinov2_vitl14_reg4_pretrain.pth).
You can simply add `--registers` to the (train or test) run command and load the model with registers to use the SelaVPR model based on DINOv2+registers backbone, for example
```
python3 train.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=msls --queries_per_epoch=30000 --foundation_model_path=/path/to/pre-trained/dinov2_vitl14_reg4_pretrain.pth --registers
```
```
python3 eval.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=msls --resume=/path/to/finetuned/msls/model/SelaVPR_reg4_msls.pth --rerank_num=100 --registers
```
The finetuned (on MSLS) SelaVPR model with registers can be downloaded [HERE](https://drive.google.com/file/d/16Qkr6MGe3k0kYtFfw3YLQXZFn4c9YvJk/view?usp=sharing).
For the (dense or coarse) local matching between two images, run
```
python3 visualize_pairs.py --datasets_folder=./ --resume=/path/to/finetuned/msls/model/SelaVPR_reg4_msls.pth --registers
```
### HeatMap Visualization
To obtain the heatmap of an input image, run
```
python3 visual.py --datasets_folder=/home/lufeng/data/VPR/datasets_vg/datasets --resume=/path/to/finetuned/msls/model/SelaVPR_msls.pth
```
### Efficient RAM Usage (optional)
The `test_efficient_ram_usage()` function in `test.py` is used to address the issue of `RAM out of memory` (this issue may cause the program to be killed). This function saves the extracted local features in `./output_local_features/` and loads only the local features currently needed into RAM each time. You can simply add `--efficient_ram_testing` to the (train or test) run command to use it, for example
```
python3 train.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=pitts30k --queries_per_epoch=5000 --resume=/path/to/finetuned/msls/model/SelaVPR_msls.pth --efficient_ram_testing
```
```
python3 eval.py --datasets_folder=/path/to/your/datasets_vg/datasets --dataset_name=pitts30k --resume=/path/to/finetuned/pitts30k/model/SelaVPR_pitts30k.pth --rerank_num=100 --efficient_ram_testing
```
### More Details about Datasets
`MSLS-val`: We use the official version of [MSLS-val](https://github.com/mapillary/mapillary_sls) (only contains 740 query images) for testing, which is a subset of the MSLS-val formated by [VPR-datasets-downloader](https://github.com/gmberton/VPR-datasets-downloader) (contains about 11k query images). More detail can be found [here](https://github.com/Lu-Feng/SelaVPR/issues/1).
`Nordland-test`: Download the Downsampled version [here](http://webdiis.unizar.es/~jmfacil/pr-nordland/).
## Acknowledgements
Parts of this repo are inspired by the following repositories:
[Visual Geo-localization Benchmark](https://github.com/gmberton/deep-visual-geo-localization-benchmark)
[DINOv2](https://github.com/facebookresearch/dinov2)
## Citation
If you find this repo useful for your research, please consider leaving a star⭐️ and citing the paper
```
@inproceedings{selavpr,
title={Towards Seamless Adaptation of Pre-trained Models for Visual Place Recognition},
author={Lu, Feng and Zhang, Lijun and Lan, Xiangyuan and Dong, Shuting and Wang, Yaowei and Yuan, Chun},
booktitle={The Twelfth International Conference on Learning Representations},
year={2024}
}
```