# SPADE/GauGAN: Semantic Image Synthesis with Spatially-Adaptive Normalization
###
[Project](https://nvlabs.github.io/SPADE/) |
[Paper](https://arxiv.org/abs/1903.07291) |
[GTC Video (2m)](https://youtu.be/p5U4NgVGAwg) |
[Video (2m)](https://youtu.be/MXWm6w4E5q0) |
[Demo](https://www.nvidia.com/en-us/research/ai-playground/) |
[Previous Implementation](https://github.com/NVlabs/SPADE) |
[Two Minute Papers Video](https://youtu.be/hW1_Sidq3m8)
 ## License
Imaginaire is released under [NVIDIA Software license](LICENSE.md).
For commercial use, please consult [researchinquiries@nvidia.com](researchinquiries@nvidia.com)
## Software Installation
For installation, please checkout [INSTALL.md](../../INSTALL.md).
## Hardware Requirement
We trained our model using an NVIDIA DGX1 with 8 V100 32GB GPUs. Training took
about 2-3 week.
## Training
SPADE prefers the following data structure.
```
${TRAINING_DATASET_ROOT_FOLDER}
└───images
└───0001.jpg
└───0002.jpg
└───0003.jpg
...
└───seg_maps
└───0001.png
└───0002.png
└───0003.png
...
└───edge_maps
└───0001.png
└───0002.png
└───0003.png
...
```
### Training data preparation
- Download
[COCO training images](http://images.cocodataset.org/zips/train2017.zip),
[COCO validation images](http://images.cocodataset.org/zips/val2017.zip)
, and [Stuff-Things map](http://calvin.inf.ed.ac
.uk/wp-content/uploads/data/cocostuffdataset/stuffthingmaps_trainval2017.zip)
the dataset and unzip the files.
Extract images, segmentation masks, and object boundaries for the edge maps.
Organize them based on the above data structure.
- Build the lmdbs
```bash
for f in train val; do
python scripts/build_lmdb.py \
--config configs/projects/spade/cocostuff/base128_bs4.yaml \
--data_root dataset/cocostuff_raw/${f} \
--output_root dataset/cocostuff/${f} \
--overwrite \
--paired
done
```
### Training command
```bash
python -m torch.distributed.launch --nproc_per_node=8 train.py \
--config configs/projects/spade/cocostuff/base128_bs4.yaml \
--logdir logs/projects/spade/cocostuff/base128_bs4.yaml
```
## Inference
SPADE prefers the following file arrangement for testing.
```
${TEST_DATASET_ROOT_FOLDER}
└───seg_maps
└───0001.png
└───0002.png
└───0003.png
...
└───edge_maps
└───0001.png
└───0002.png
└───0003.png
...
```
- Download sample test data by running
```bash
python scripts/download_test_data.py --model_name spade
```
```bash
python -m torch.distributed.launch --nproc_per_node=1 inference.py \
--config configs/projects/spade/cocostuff/base128_bs4.yaml \
--output_dir projects/spade/output/cocostuff
```
The results are stored in `projects/spade/output/cocostuff`
Below we show the expected output images.
## License
Imaginaire is released under [NVIDIA Software license](LICENSE.md).
For commercial use, please consult [researchinquiries@nvidia.com](researchinquiries@nvidia.com)
## Software Installation
For installation, please checkout [INSTALL.md](../../INSTALL.md).
## Hardware Requirement
We trained our model using an NVIDIA DGX1 with 8 V100 32GB GPUs. Training took
about 2-3 week.
## Training
SPADE prefers the following data structure.
```
${TRAINING_DATASET_ROOT_FOLDER}
└───images
└───0001.jpg
└───0002.jpg
└───0003.jpg
...
└───seg_maps
└───0001.png
└───0002.png
└───0003.png
...
└───edge_maps
└───0001.png
└───0002.png
└───0003.png
...
```
### Training data preparation
- Download
[COCO training images](http://images.cocodataset.org/zips/train2017.zip),
[COCO validation images](http://images.cocodataset.org/zips/val2017.zip)
, and [Stuff-Things map](http://calvin.inf.ed.ac
.uk/wp-content/uploads/data/cocostuffdataset/stuffthingmaps_trainval2017.zip)
the dataset and unzip the files.
Extract images, segmentation masks, and object boundaries for the edge maps.
Organize them based on the above data structure.
- Build the lmdbs
```bash
for f in train val; do
python scripts/build_lmdb.py \
--config configs/projects/spade/cocostuff/base128_bs4.yaml \
--data_root dataset/cocostuff_raw/${f} \
--output_root dataset/cocostuff/${f} \
--overwrite \
--paired
done
```
### Training command
```bash
python -m torch.distributed.launch --nproc_per_node=8 train.py \
--config configs/projects/spade/cocostuff/base128_bs4.yaml \
--logdir logs/projects/spade/cocostuff/base128_bs4.yaml
```
## Inference
SPADE prefers the following file arrangement for testing.
```
${TEST_DATASET_ROOT_FOLDER}
└───seg_maps
└───0001.png
└───0002.png
└───0003.png
...
└───edge_maps
└───0001.png
└───0002.png
└───0003.png
...
```
- Download sample test data by running
```bash
python scripts/download_test_data.py --model_name spade
```
```bash
python -m torch.distributed.launch --nproc_per_node=1 inference.py \
--config configs/projects/spade/cocostuff/base128_bs4.yaml \
--output_dir projects/spade/output/cocostuff
```
The results are stored in `projects/spade/output/cocostuff`
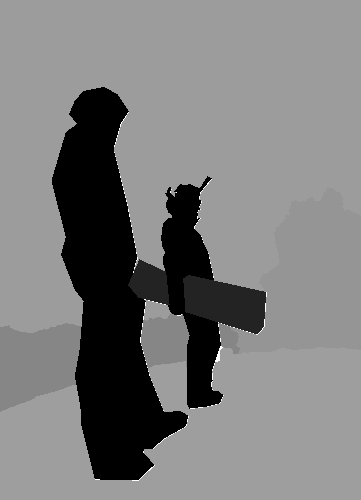
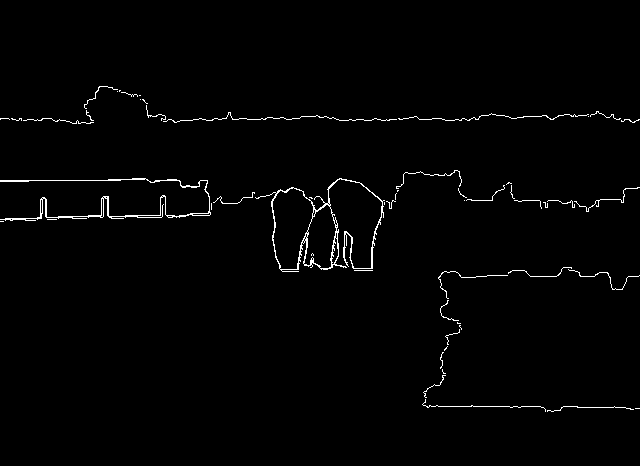
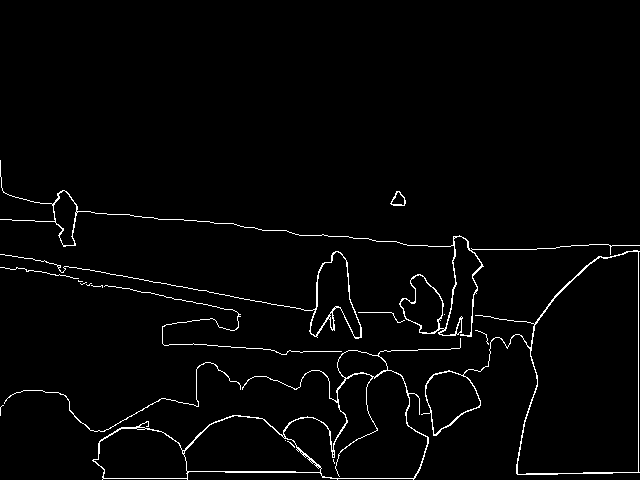
Below we show the expected output images.
|
Ground truth
|
Segmentation
|
Edge
|
Synthesis result
|

|
|

|

|

|

|
|

|

|

|
|

|
## Citation
If you use this code for your research, please cite our papers.
```
@inproceedings{park2019SPADE,
title={Semantic Image Synthesis with Spatially-Adaptive Normalization},
author={Park, Taesung and Liu, Ming-Yu and Wang, Ting-Chun and Zhu, Jun-Yan},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2019}
}
```