# 推理基础设施
本文档介绍 **SenseNova-U1** 的推理基础设施,其构建于 **[LightLLM](https://github.com/ModelTC/lightllm)** 与 **[LightX2V](https://github.com/ModelTC/lightx2v)** 之上。
## 总览
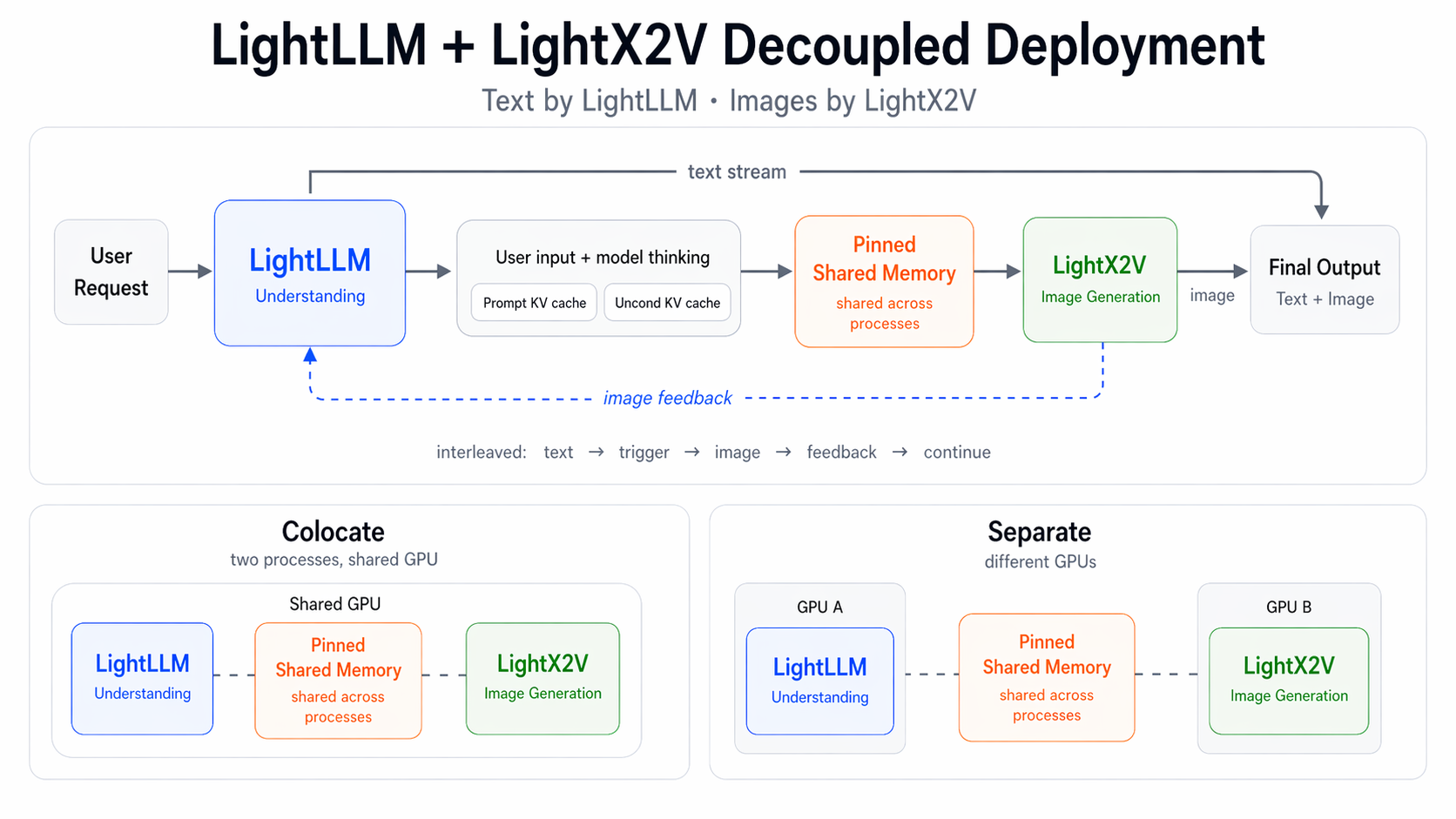
SenseNova-U1 对外呈现为一个统一的多模态模型,但在实际生产中,理解与生成两条路径的执行形态差异显著:二者在调度策略、并行方案与资源配比上各有偏好,难以用同一套服务配置覆盖。若将它们耦合在单一的整体运行时中,各自的选择会被无谓地绑死,结果往往是两条路径都偏离各自的最优工作点。
为避免这种耦合,SenseNova-U1 采用**解耦**架构:
- **LightLLM** 负责理解、文本流式输出与控制流;
- **LightX2V** 负责图像生成。
两个引擎通过 pinned 共享内存与高性能传输内核交换生成状态,交接过程轻量,同时各自仍可按最优执行策略独立运行。
该设计在生产中具有以下实际收益:
- 并行策略相互独立(例如理解侧 `TP=2`(张量并行=2),生成侧 `CFG=2`(CFG 并行=2)或 `SP=2`(序列并行=2));
- 资源配额相互独立(可分配不同的 GPU 数量与显存预算);
- 针对文本密集型与图像密集型流量可分别弹性扩缩;
- 运维隔离更清晰,性能调优也更简单。
同一架构可根据硬件预算与流量特征,在两种模式下部署:
- **Separate(分离部署)**:LightLLM 与 LightX2V 运行在不同的 GPU 组上;
- **Colocate(共置部署)**:LightLLM 与 LightX2V 作为独立进程运行在同一张 GPU 上。
生产环境中,`Separate` 是默认选择,其瓶颈定位更清晰,也便于独立扩缩;`Colocate` 则更适合快速验证、生成密集型场景或 GPU 数量有限的部署。
### NEO-Unify 多模态 Prefill 的注意力
NEO-Unify 的 prefill 注意力并非标准因果注意力:文本 token 仍保持因果,而图像 token 则会同时关注整个文本前缀以及完整的图像 span。为支持这种混合掩码,我们对栈内两套注意力实现都进行了改造——Triton 内核与官方 FlashAttention3 (FA3) 代码库。我们的 FA3 分支见 [WANDY666/flash-attention](https://github.com/WANDY666/flash-attention)。
具体做法是新增一个可选的 image_token_tag 参数,用以逐行调整掩码:文本行沿用标准因果掩码;图像行不再采用朴素的因果截断,而是被允许关注其之前的全部文本 token,以及所在图像 span 内的全部图像 token。
为在尽可能多的情况下保留因果三角形带来的加速,内核按 M-block 粒度进行判断——对当前 block 内的 image_token_tag 做 OR-reduce:若该 block 不含图像 token,则维持标准因果 K-range;若含有图像 token,则将 K-range 扩展至覆盖所需的图像 span。因此纯文本 block 仍走常规因果路径,只有真正相关的 block 才承担混合掩码引入的额外开销。
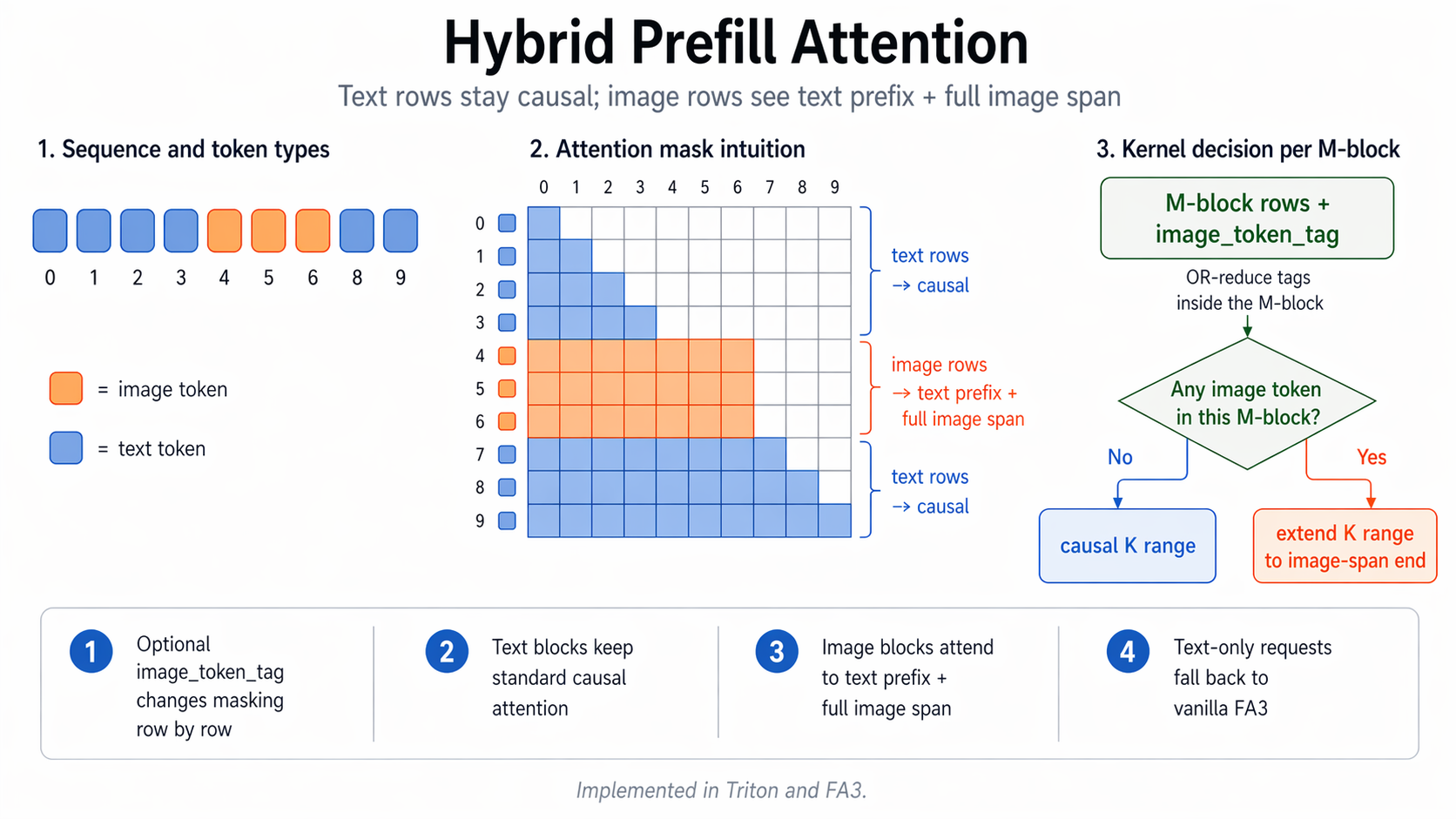
额外开销并不取决于某个固定比例,而是取决于图像 token 在序列中的分布,以及它们跨 M-block 边界的方式。当图像行仅集中在序列的某一部分时,额外开销也被相应地局部化。对于纯文本请求,image_token_tag 为空,内核即回落至原生 FA3,没有任何额外开销。
下表对比了 Neo 风格多模态 prefill 的两种实现:
- **Triton 实现**:更容易迁移到现有代码库,集成成本低、迭代更快;
- **FA3 实现**:在受支持的硬件上绝对性能更高。
| batch | max_seq_len | image_token_num | triton (ms) | FA3 (ms) | 加速比 (×) |
|:-------:|:-----------:|:---------------:|:-----------:|:--------:|:----------:|
| 8 | 4096 | 88 | 1.95 | 0.81 | **2.41×** |
| 8 | 8192 | 171 | 6.55 | 2.68 | **2.45×** |
| 8 | 65536 | 150 | 43.30 | 14.95 | **2.90×** |
| 16 | 4096 | 379 | 4.12 | 1.68 | **2.46×** |
| 16 | 8192 | 246 | 17.76 | 7.40 | **2.40×** |
| 16 | 65536 | 206 | 107.74 | 33.66 | **3.20×** |
| 32 | 4096 | 726 | 8.46 | 3.46 | **2.44×** |
| 32 | 8192 | 536 | 31.74 | 13.24 | **2.40×** |
| 32 | 65536 | 417 | 171.00 | 58.26 | **2.94×** |
| 64 | 4096 | 1170 | 16.08 | 6.88 | **2.34×** |
| 64 | 8192 | 1177 | 55.48 | 22.91 | **2.42×** |
| 64 | 65536 | 1291 | 348.89 | 124.82 | **2.80×** |
| 128 | 4096 | 2057 | 30.89 | 12.53 | **2.47×** |
| 128 | 8192 | 2196 | 104.73 | 43.22 | **2.42×** |
| 128 | 65536 | 2205 | 706.60 | 241.67 | **2.92×** |
### 部署
Docker 镜像、启动命令与 API 测试的简明操作手册,请参见 [`deployment_CN.md`](./deployment_CN.md)。
### 生成性能
下表给出 **SenseNova-U1-8B-MoT(NEO-Unify)** 在
**2048x2048** 图像生成任务上的基准模版。列出了不同机型与部署配置下的实测数据。
注:TP2+CFG2 表示张量并行=2 + CFG 并行=2。
| GPU | 部署配置 | 单步延迟 (s/step) | 端到端延迟 (s) |
|:----:|:--------:|:-----------------:|:--------------:|
| H100 | TP2+CFG2 / colocate | 0.158 | 9.23 |
| H200 | TP2+CFG2 / colocate | 0.152 | 9.54 |
| 5090 | TP2+CFG2 / separate | 0.415 | 23.04 |
| L40S | TP2+CFG2 / separate | 0.443 | 25.62 |
在 NEO-Unify 中,生成阶段所用的 KV cache 由理解模块提供,因此 T2I(文生图)与 I2I(图像编辑)在运行时特征上几乎一致。为简洁起见,此处仅给出 T2I 的延迟数据。
### 跨模型速度对比
下表对比了在启用**CFG**条件下,生成 **2048x2048** 图像时单个 diffusion step 的延迟。除特别说明外,所有数据均在 **H100** 上测得;其中 `SenseNova-U1-8B-MoT (NEO-Unify, TP2+CFG2)` 使用的是 `2x H100`。
注:TP2+CFG2 表示张量并行=2 + CFG 并行=2。
| 模型 | 理解模块 | 生成模块 | 单步延迟 (s/step) |
|:-------------------------:|:--------:|:--------:|:-----------------:|
| Qwen-Image-2512 | 7B | 20B | 1.478 |
| Z-Image | 4B | 6B | 1.110 |
| GLM-Image | 9B | 7B | 1.394 |
| ERNIE-Image | 8B | 8B | 1.565 |
| LongCat-Image | 8B | 6B | 0.796 |
| SenseNova-U1-8B-MoT (NEO-Unify) | 8B | 8B | 0.312 |
| SenseNova-U1-8B-MoT (NEO-Unify, TP2+CFG2) | 8B | 8B | 0.158 |