![]()
Code repository for Wall-E_v2.7
Report Bug
·
Request Feature
·
Send a Pull Request




|
 |
|  |
|  |
:-------------------------:|:-------------------------:|:-------------------------:
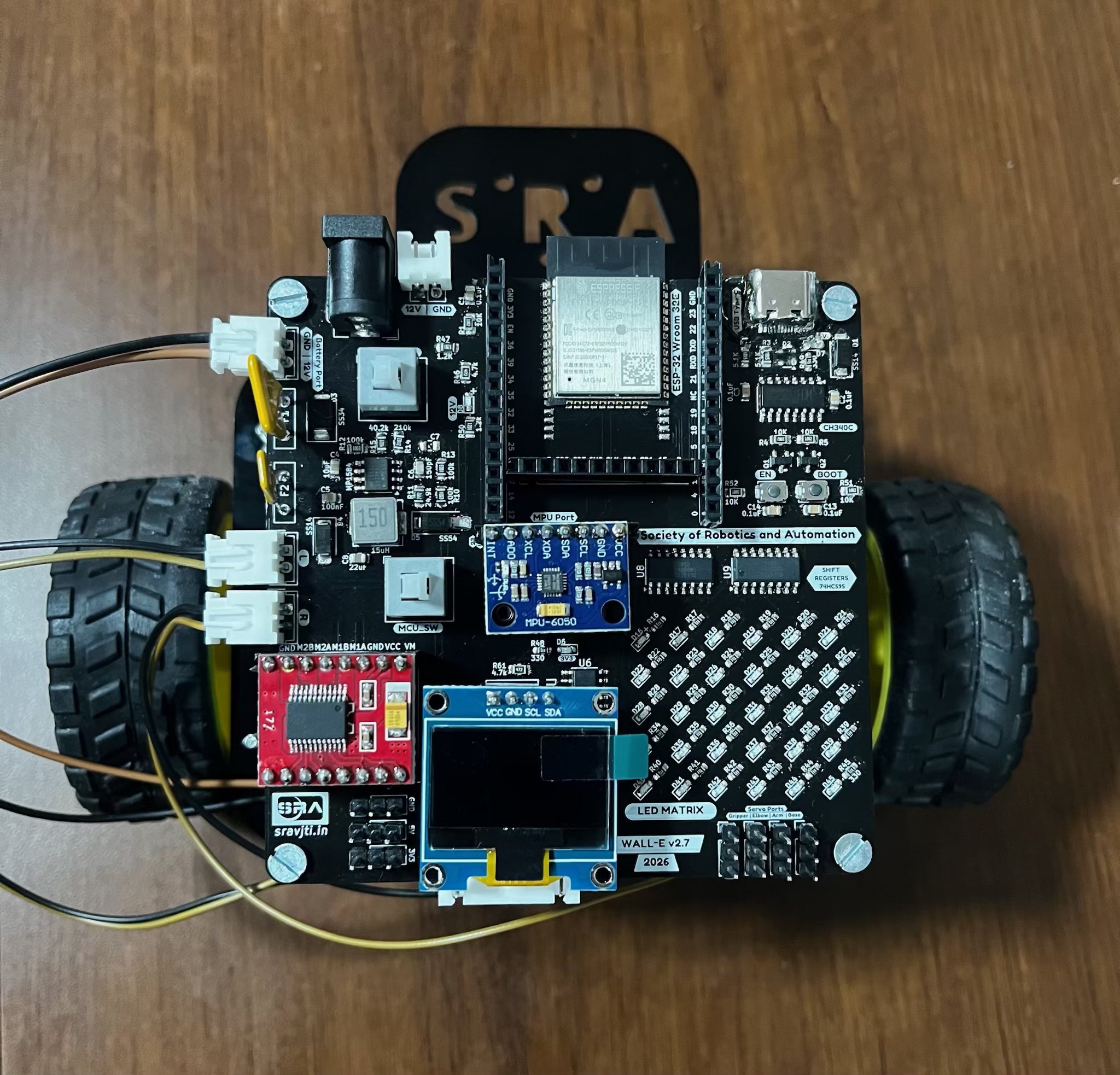
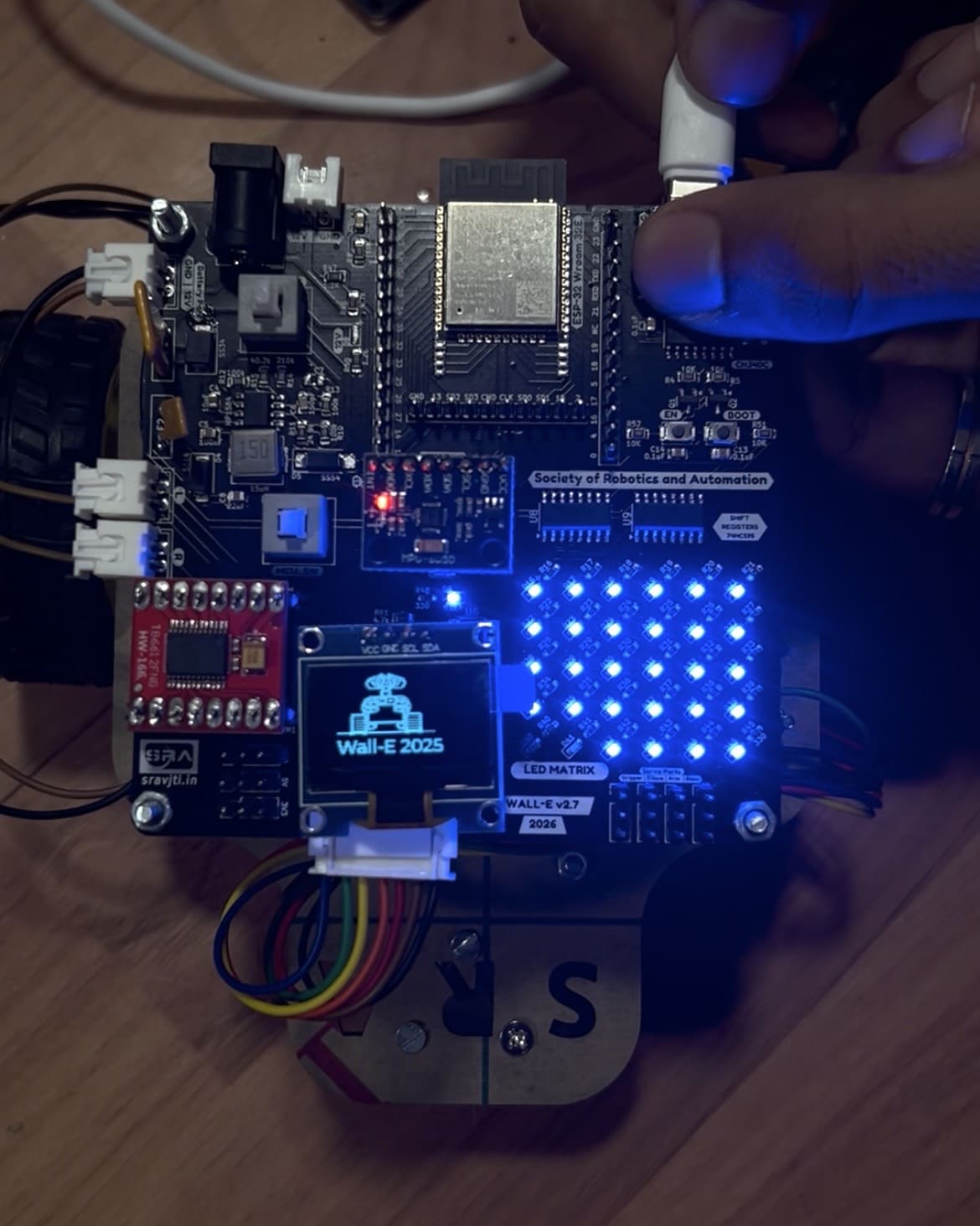
Wall-E Bot Self-Balancing | Wall-E Bot with OLED Display | Wall-E Bot with LED Matrix
Wall-E is a two-wheeled educational **self balancing** and **line following** robot developed by **SRA-VJTI**, designed to teach embedded robotics concepts such as **control theory (PID)**, and **embedded communication**. The brain of the robot is an **ESP32** microcontroller paired with a custom-made SRA development board.
This repository hosts the firmware, demo projects, and study material used in SRA VJTI's Wall-E workshop. With features like inbuilt Wi-Fi support and BLE, and extensive application in several domains like IoT, RF, etc, The workshop entails various essential concepts such as PID Control, Embedded Communication Protocols, PWM, Filters, RTOS, etc. and gives its attendees (first-year students) a general idea about the world of robotics and embedded hardware.
## Architecture
### Hardware
- **ESP32 Microcontroller**: central processing, sensor reading, control loops
- **SRA Development Board**: custom PCB that connects ESP32 to sensors, motor drivers, power supply, etc.
- **Sensors**
- MPU6050 IMU (gyro + accelerometer) for self balancing
- Light Sensor Array (LSA) for line following
- **Actuators**: Dual DC motors (controlled via PWM)
- **Communication**: I2C, SPI, UART for peripheral communication
- **User Interface**
- (Optional) OLED display for local feedback
### Software
- Built using **ESP-IDF**, leveraging tasks in FreeRTOS.
- WebSocket interface for real-time tuning : dynamic tuning via WebSocket without reflashing firmware.
- runs Conway's Game of Life on the SRA Board LED matrix using ESP-IDF
---
## Installation
- For Installation, please refer to [these instructions](Installations.md)
- You can also refer to [Step-by-Step official guide by espressif](https://docs.espressif.com/projects/esp-idf/en/latest/esp32/get-started/#installation-step-by-step)
## Examples
| TOPIC | Link | Description |
| :-------------------------------------: | :-----------------------------------------------------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------: |
| LED Matrix | [LED_Matrix](https://github.com/SRA-VJTI/Wall-E/blob/master/1_led_matrix/README.md) | Performing LED Blink by connecting the LED with esp32 |
| Light Sensing Array | [LSA](https://github.com/SRA-VJTI/Wall-E/blob/master/2_LSA/README.md) | Sensing Array that uses different Light Sensors, majorly used for Line-Following |
| MPU6050 | [MPU](https://github.com/SRA-VJTI/Wall-E/blob/master/3_MPU/README.md) | Motion controlled MPU measures angles with respect to 6 Degrees of Freedom |
| Pulse Width Modulation | [PWM](https://github.com/SRA-VJTI/Wall-E/blob/master/5_PWM/README.md) | Calculate average voltage and controls speed accordingly |
| Line-Following | [Line_Following](https://github.com/SRA-VJTI/Wall-E/tree/master/6_line_following/) | Line-Following algorithm that enables the bot to follow the path of white line |
| Self-Balancing | [Self_Balancing](https://github.com/SRA-VJTI/Wall-E/blob/master/7_self_balancing/README.md) | Self-Balancing algorithm that enables the bot to balance its weight under the force of gravity |
## Running the Example Projects
### 1. Choose an Example
Navigate to one of the examples in the examples directory under Wall-E.
```bash
cd components/sra-board-component/examples/
|
:-------------------------:|:-------------------------:|:-------------------------:
Wall-E Bot Self-Balancing | Wall-E Bot with OLED Display | Wall-E Bot with LED Matrix
Wall-E is a two-wheeled educational **self balancing** and **line following** robot developed by **SRA-VJTI**, designed to teach embedded robotics concepts such as **control theory (PID)**, and **embedded communication**. The brain of the robot is an **ESP32** microcontroller paired with a custom-made SRA development board.
This repository hosts the firmware, demo projects, and study material used in SRA VJTI's Wall-E workshop. With features like inbuilt Wi-Fi support and BLE, and extensive application in several domains like IoT, RF, etc, The workshop entails various essential concepts such as PID Control, Embedded Communication Protocols, PWM, Filters, RTOS, etc. and gives its attendees (first-year students) a general idea about the world of robotics and embedded hardware.
## Architecture
### Hardware
- **ESP32 Microcontroller**: central processing, sensor reading, control loops
- **SRA Development Board**: custom PCB that connects ESP32 to sensors, motor drivers, power supply, etc.
- **Sensors**
- MPU6050 IMU (gyro + accelerometer) for self balancing
- Light Sensor Array (LSA) for line following
- **Actuators**: Dual DC motors (controlled via PWM)
- **Communication**: I2C, SPI, UART for peripheral communication
- **User Interface**
- (Optional) OLED display for local feedback
### Software
- Built using **ESP-IDF**, leveraging tasks in FreeRTOS.
- WebSocket interface for real-time tuning : dynamic tuning via WebSocket without reflashing firmware.
- runs Conway's Game of Life on the SRA Board LED matrix using ESP-IDF
---
## Installation
- For Installation, please refer to [these instructions](Installations.md)
- You can also refer to [Step-by-Step official guide by espressif](https://docs.espressif.com/projects/esp-idf/en/latest/esp32/get-started/#installation-step-by-step)
## Examples
| TOPIC | Link | Description |
| :-------------------------------------: | :-----------------------------------------------------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------: |
| LED Matrix | [LED_Matrix](https://github.com/SRA-VJTI/Wall-E/blob/master/1_led_matrix/README.md) | Performing LED Blink by connecting the LED with esp32 |
| Light Sensing Array | [LSA](https://github.com/SRA-VJTI/Wall-E/blob/master/2_LSA/README.md) | Sensing Array that uses different Light Sensors, majorly used for Line-Following |
| MPU6050 | [MPU](https://github.com/SRA-VJTI/Wall-E/blob/master/3_MPU/README.md) | Motion controlled MPU measures angles with respect to 6 Degrees of Freedom |
| Pulse Width Modulation | [PWM](https://github.com/SRA-VJTI/Wall-E/blob/master/5_PWM/README.md) | Calculate average voltage and controls speed accordingly |
| Line-Following | [Line_Following](https://github.com/SRA-VJTI/Wall-E/tree/master/6_line_following/) | Line-Following algorithm that enables the bot to follow the path of white line |
| Self-Balancing | [Self_Balancing](https://github.com/SRA-VJTI/Wall-E/blob/master/7_self_balancing/README.md) | Self-Balancing algorithm that enables the bot to balance its weight under the force of gravity |
## Running the Example Projects
### 1. Choose an Example
Navigate to one of the examples in the examples directory under Wall-E.
```bash
cd components/sra-board-component/examples/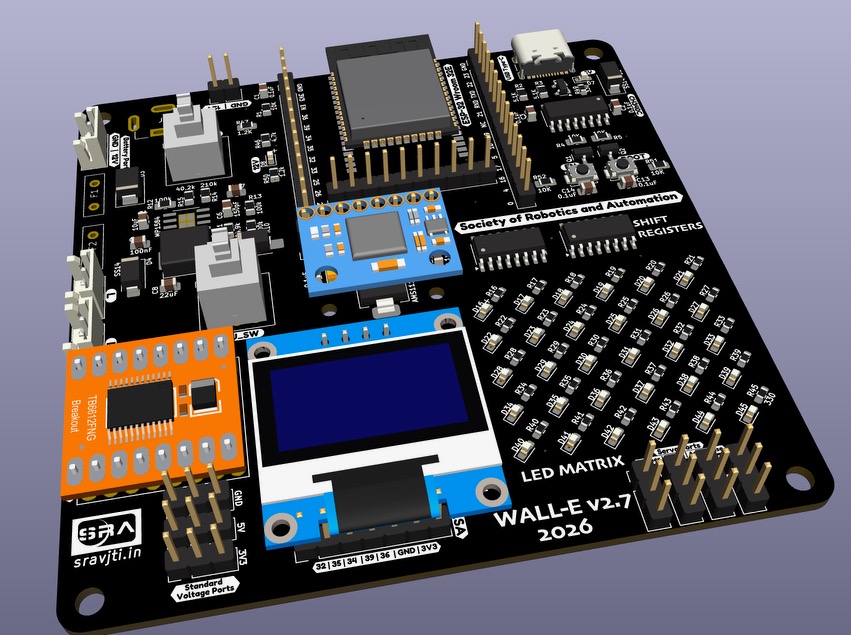
SRA development board