# فقط تحدّث مع الوكيل الخاص بك، وسيتعلّم ويتطوّر باستمرار.
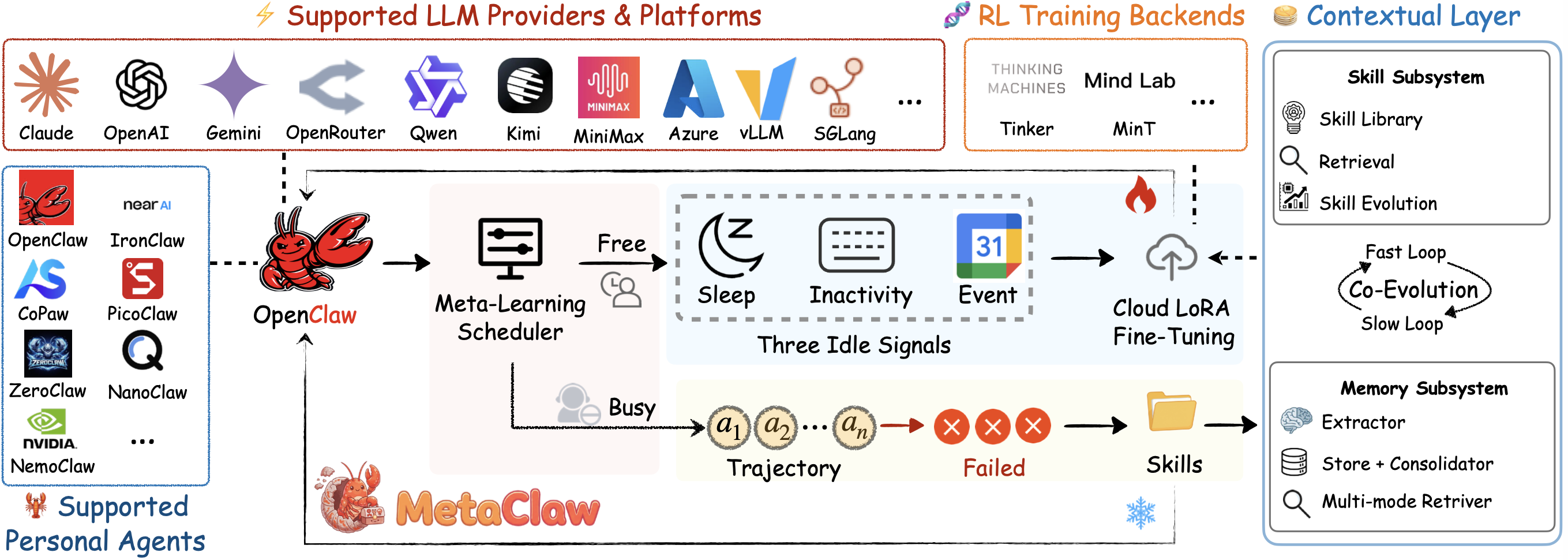
مستوحى من طريقة تعلّم الدماغ. اجعل 🦞 الخاص بك يتعلّم ويتطوّر من كل محادثة حقيقية. لا حاجة لوحدات GPU. يدعم Kimi وQwen وClaude وMiniMax والمزيد.
[🇺🇸 English](../README.md) • [🇨🇳 中文](./README_ZH.md) • [🇯🇵 日本語](./README_JA.md) • [🇰🇷 한국어](./README_KO.md) • [🇫🇷 Français](./README_FR.md) • [🇩🇪 Deutsch](./README_DE.md) • [🇪🇸 Español](./README_ES.md) • [🇧🇷 Português](./README_PT.md) • [🇷🇺 Русский](./README_RU.md) • [🇮🇹 Italiano](./README_IT.md) • [🇻🇳 Tiếng Việt](./README_VI.md) • [🇮🇳 हिन्दी](./README_HI.md)
[نظرة عامة](#-نظرة-عامة) • [البدء السريع](#-البدء-السريع) • [الإعدادات](#️-الإعدادات) • [وضع المهارات](#-وضع-المهارات) • [وضع RL](#-وضع-rl) • [وضع MadMax](#-وضع-madmax-الافتراضي) • [الاقتباس](#-الاقتباس)
