{
"cells": [
{
"cell_type": "markdown",
"metadata": {
"slideshow": {
"slide_type": "slide"
}
},
"source": [
"# Angular velocity in 3D movements\n",
"\n",
"> Renato Naville Watanabe \n",
"> Laboratory of Biomechanics and Motor Control ([http://pesquisa.ufabc.edu.br/bmclab](http://pesquisa.ufabc.edu.br/bmclab)) \n",
"> Federal University of ABC, Brazil"
]
},
{
"cell_type": "markdown",
"metadata": {
"slideshow": {
"slide_type": "slide"
}
},
"source": [
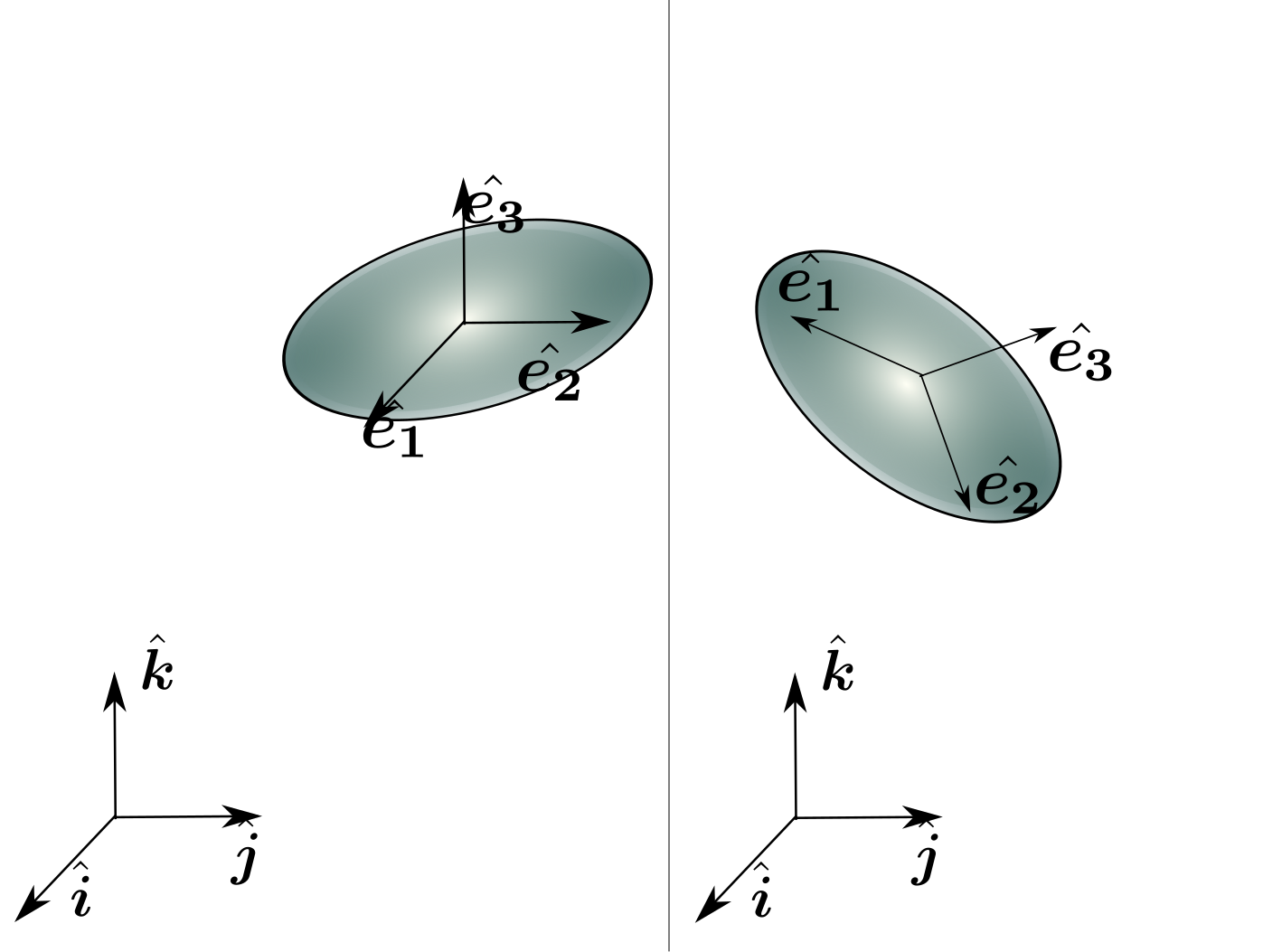
"An usual problem found in Biomechanics (and Mechanics in general) is to find the angular velocity of an object. We consider that a basis \n",
"$\\hat{\\boldsymbol e_1}$, $\\hat{\\boldsymbol e_2}$ and $\\hat{\\boldsymbol e_3}$ is attached to the body and is known. To learn how to find a basis of a frame of reference, see [this notebook](https://nbviewer.jupyter.org/github/BMClab/bmc/blob/master/notebooks/ReferenceFrame.ipynb).\n",
"\n",
""
]
},
{
"cell_type": "markdown",
"metadata": {
"slideshow": {
"slide_type": "slide"
}
},
"source": [
"## Axis of rotation\n",
"\n",
"As in the planar movement, the angular velocity is a vector perpendicular to the rotation. The line in the direction of the angular velocity vector is known as the axis of rotation. \n",
"\n",
"The rotation beween two frames of reference is characterized by the rotation matrix $R$ obtained by stacking the versors $\\hat{\\boldsymbol e_1}$, $\\hat{\\boldsymbol e_2}$ and $\\hat{\\boldsymbol e_3}$ in each column of the matrix (for a revision on rotation matrices see [this](https://nbviewer.jupyter.org/github/bmclab/bmc/blob/master/notebooks/Transformation2D.ipynb) and [this](https://nbviewer.jupyter.org/github/bmclab/bmc/blob/master/notebooks/Transformation3D.ipynb) notebooks). \n",
"\n",
"A vector in the direction of the axis of rotation is a vector that does not changes the position after the rotation. That is:\n",
"\n",
" \n",
"\\begin{equation}\n",
"v = Rv\n",
"\\end{equation}\n",
"\n",
"\n",
"\n",
"This vector is the eigenvector of the rotation matrix $R$ with eigenvalue equal to one. "
]
},
{
"cell_type": "markdown",
"metadata": {
"slideshow": {
"slide_type": "slide"
}
},
"source": [
"Below the yellow arrow indicates the axis of rotation of the rotation between the position of the reference frame $\\hat{\\boldsymbol i}$, $\\hat{\\boldsymbol j}$ and $\\hat{\\boldsymbol k}$ and the reference frame of $\\hat{\\boldsymbol e_1}$, $\\hat{\\boldsymbol e_2}$ and $\\hat{\\boldsymbol e_3}$."
]
},
{
"cell_type": "code",
"execution_count": 4,
"metadata": {
"slideshow": {
"slide_type": "fragment"
}
},
"outputs": [
{
"data": {
"application/vnd.jupyter.widget-view+json": {
"model_id": "ce939d46296e4d819d9facbe357cd3c0",
"version_major": 2,
"version_minor": 0
},
"image/png": "iVBORw0KGgoAAAANSUhEUgAAAfQAAAH0CAYAAADL1t+KAAAAOXRFWHRTb2Z0d2FyZQBNYXRwbG90bGliIHZlcnNpb24zLjUuMywgaHR0cHM6Ly9tYXRwbG90bGliLm9yZy/NK7nSAAAACXBIWXMAAA9hAAAPYQGoP6dpAAAstUlEQVR4nO3de1yUZcL/8e8MZwUFVDygiQc8t2lqia66pT3tliumVtZjdtI2Nx99zKSfHdzaQ89WxmrWZoe1kswyrawHdzc320fNyjyHICqeT5jKWWRg5v79cQeIooAiM1x+3q8XL8eZYbjoFX64rrnv63ZYlmUJAADUa05vDwAAAFw6gg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAEIOgAABiDoAAAYgKADAGAAgg4AgAH8vT0AALjc8vLylJiYKMuyNGHCBEVHR3t7SECtI+gAjDdz5kzNnj1bkpSamqrFixd7d0DAZeCwLMvy9iAA4HJJSUlRr169FBkZqbCwMGVkZGjFihUaOnSot4cG1CqCDqDey8uTEhMly5ImTJDOXFEfPHiwVq1apU8++URRUVEaOHCgYmNjtXXrVgUGBnpv0EAt46A4APXezJnSM89Izz4rTZ1afn9SUpJWrVqlcePGacSIEerfv7+mT5+u9PR0JSYmem28wOXADB1AvZaSIvXqJUVGSmFhUkaGtGKFdN11uercubP8/f2VkpKixo0bS5JcLpf69u2rjIwMpaWlqU2bNl7+DoDaQdAB1GuDB0urVkmffCJFRUkDB0qxsdLWrRIr6riSsOQOoN5KSrJjPm6cNGKE1L+/NH26lJ5uv6cOXEmYoQOol3Jzpc6dJX9/e9n9pxV1uVxS37720ntamsSKOq4UBB0AAAOw5A4AgAEIOoB6a/v27Zo2bZp69eqliIgIBQUFqV27dnrwwQe1fft2bw8PqFMsuQOod1wulx577DG9+uqr8ng8lT4nODhYCxcu1MiRI+t4dIB3EHQA9Yrb7VZ8fLySk5MlSbfccovGjBmjjh07qqCgQGvXrlViYqJycnIUEhKi1NRUxcTEeHfQQB3g4iwA6pXHHntMycn/lFQkKVD9+0v33FP++NChQzV8+HDFxcWpsLBQr7zyimbNmuWt4QJ1hvfQAdQb69ev15w5cyR1l2TvGnPNNec+r2fPnhoyZIgk6Ztvvqm7AQJeRNAB1BszZsyQZVnq02dC2X09e1b+3KuuukqSlJWVVQcjA7yPJXcA9cLhw4f15ZdfSpLWry/+6d7jatOm2QU/Lzw8/PIODPARzNAB1AvJyckqP4a3509/bqny8zp06FB2Ozs7W5MnT1ZcXJxatGihoKAgRUdH68Ybb9TSpUvFMcKoz5ihA6gXUlJSJEnR0dHKy/u5cnOlceOu0fTpP1zw85o1K5/BHz9+XPPnz1e/fv00YsQIRUZG6tixY/r88881evRoTZgwQW+88cZl/T6Ay4WgA6gXMjMzJUkRET116JD9T9fQoU3Vo0fTc5576JA0erT07bf2FdfmzpUeekhq166dsrOz5e9f8Z++vLw89evXT2+++aamTJmi7t27X/5vCKhlLLkDqBcKCwslST/+GF12X2UHxK1aJfXubce8ZUvpq6/smEuSn5/fOTGXpLCwMN18882SpF27dtX62IG6QNAB1AvR0XbIMzNbSLJn3l26VHzO7NnSkCFSZqbUr5+0fr19SdWqnD59WitXrpTD4VC3bt1qeeRA3WDJHUC9cNNNN+m1115T6QFx3bp5FBBgz0lOnZLGj5cWLbKfe++9xerde75atfpNpa+VnZ2t2bNny+Px6NixY1q+fLkOHDig3/3ud4qNja2D7waofWz9CqBe8Hg86tOnjzZtWiqpnRo3Xqo//emooqLi9MQTXbVrV4j8/Nzq3TtJaWmT1aNHD61du7bS19q7d6/atWtX9veAgAA999xzmjZtmhwORx19R0DtYoYOoF5wOp1auPBzdetmL73n5PyfJk3KkHS3pBBJR+V2j9a6dV9Lkvr27Xve14qJiZFlWXK73Tpw4IA++OADPfnkk1q7dq0WL15c6fvsgK9jhg6g3li1Sho82L7dtOk6HT/eR5JTDsc6RUVNVJcuYYqLi9OwYcM0YMCAGr32iy++qISEBP31r3/VxIkTa3/wwGVG0AHUGy+/LE2ZUvG+G2+Uli+XgoIu7bW3bNminj176o477tCHH354aS8GeAFHuQOoNzZvtv9s184+NU2yT0/btu3SX/vw4cOSxHI76i2CDqDeKA16377SsmX2eeanTknDh0tHjlTn8zcrJyfnnPtPnjypJ554QpL0q1/9qhZHDNQdfhUFUC+UlEipqfbta66RoqPtqA8aZO8MFx8v/d//SSEh53+Nd955R2+99ZZuuOEGtW3bVg0bNtS+ffuUnJys/Px8jRo1SnfffXfdfENALSPoAOqFtDSpqMi+XXoN9L59pfnzpbvvlr7/Xrr/fumDD87/GqNHj1ZOTo6+/fZbrVq1SqdOnVJkZKR+/vOfa9y4cRozZgynraHe4qA4APVCUpI0bpx9+8ABqXXr8seeekr605/s2888I/3ud3U+PMDreA8dQL1Q+v55ZGTFmEvSH/4gjRxp3372WWnx4jodGuATCDqAeqE06KXL7WdyOKQFC+yLtViWdN999j7uwJWEoAOoF7Zssf+sLOiS1LChfZBc8+ZSYaF9kNyhQ3U3PsDbeA8dAAADMEMHAMAABB2AT3rjjTfUsmVLXX311d4eClAvcB46AJ+0dOlSHT16VEePHvX2UIB6gRk6AJ/Uo0cP+fn5qWHDht4eClAvMEMH4JNGjhypFStWqGfPnrIsix3cgCpwlDsAn2NZlp588j903XUblZvbSC7X7zR+/H3eHhbg01hyB+Bz5s17WYMGfa3g4EJFRWXK6XxBbrfH28MCfBpBB+BT3G6PSkoWSZKcTrckqVmzI1q06AJXXQFA0AH4lnfeeUeRkZmSJD+/EjmdblmWtHfvQmbpwAUQdAA+w+326Nix8tm5w2FHXZKaN9+njz5a4s3hAT6NoAPwGX/721tq2vSIHA6rLOQOh+TvXyxJ2rkzyZvDA3waQQfgE9zuEp08aV/3NCSkQGeepRYQ4JJkqUWLPfroo6XeGSDg4wg6AJ/w97/PUZMmR+V0utWgQb4kqaQkQJYlOZ0ehYbmSZL27JnnzWECPougA/A6t7tER4/OlsNRotDQHDmdHklW2VHuktSoUZYcDo+iorZow4bF3hss4KMIOgCvW7lyjoKCTio4+LAaN84q2xXOPjDO3vsqMLBEjRodlp9fgTZseM6bwwV8EkEH4FUej0erVr0vSXI6SxQS0kROZ7jcbn+VlNgfbnewQkNbKCDAPlDO7d6jH374wZvDBnwOQQfgVYcOHdL33xfJ7XYoKKihGjZsIcsKldvtL4/H76ePIAUENFFYWAtJ0u7dYVq1apWXRw74Fi7OAsCrmjdvrtjYG/Tvf+/Qo4/epKZNG+v48Y3Ky/tMpZeasKw26tHjHjVrVqJ1677UunXZuuOO67w8csC3cHEWAD7n888/1pEjT6v8n6fr9ZvfvO3VMQG+jiV3AD7IUsW5BpdOBapC0AH4HMuy5OfnJ0lyOBxcCx2oBt5DB+BzLMsjh8Mhp9P5098JOlAVZugA6gGCDlSFGToAn2NZljwejzwe+3KpDgdzD6Aq/JQA8DmWVR5zGzN0oCoEHYAPsiocCMdBcUDVWHIH4JP8/PzOmKUz9wCqwk8JAJ9jWZ6z7mGGDlSFoAPwOeduYEnQgaqw5A7AB1kqKSkp+5ufH0EHqsIMHYDPYYYO1BxBB+CDrLJd4uwj3PmnCqgKS+4AfI5leeR0loec09aAqvFrL4B6gKADVWGGDsDn2Fu/2tu/2pNz5h5AVfgpAeBzztz61T4+jhk6UBWCDsAHnX2UO4CqsOQOwCf5+fmVnb7G1daAqvFTAsDnsPUrUHMEHYDPYWMZoOZYcgfggyy53e6yv7H1K1A1ZugAfFDFGTobywBVI+gAfI5lWT/tFMfWr0B1seQOwOdYlkcOh1NOJ6evAdXFr70A6gGW3IGqMEMH4IPsbV8ty5LD4eA8dKAa+CkB4HMsy1N26pr9JzN0oCoEHYAP4r1zoKZYcgfgcyzLYutXoIb4KQHgg9gpDqgpgg7AB5UH3d5ThqADVWHJHYDPsayKW78GBBB0oCrM0AH4ILZ+BWqKoAPwOfZOcWz9CtQES+4AfJC9l7tlOZidA9XEr70AfNKZl0Qn6kDVmKED8EH2TnHlV11j7gFUhZ8SAD6nNOaS5PFYzNCBaiDoAHwQW78CNcWSOwAfZMnptOcbXG0NqB5+SgD4ILZ+BWqKoAPwOZblOesegg5UhSV3AD7J4ymPOgfFAVVjhg7AB7HkDtQUM3QAPsfe+tXeXIaD4lATeXl5SkxMlGVZmjBhgqKjo709pDpD0AH4IEsOh1MOB8vtqJmZM2dq9uzZkqTU1FQtXrzYuwOqQ/zaC8AHseSOmktJSdErr7yiqKgodejQQR999JH+9a9/eXtYdYagAxeSlyc9+6z0zDPSoUPeHs0VxPpptzh7C1iW3FEdjzzyiEpKSvT6669rwYIFcjqdmjRpklwul7eHVif4KQEuZOZMO+bPPitNnert0VxBSoNuH+3OsjuqkpSUpFWrVmncuHEaMWKE+vfvr+nTpys9PV2JiYneHl6dcFiWxR6LQGVSUqRevaTISCksTMrIkFaskIYO9fbIjPe3vyWopOR/y/4eHv7fuvPOh7w4Iviy3Nxcde7cWf7+/kpJSVHjxo0lSS6XS3379lVGRobS0tLUpk0bL4/08uKgOOB8HnlEKimRXn9dioqSBg6UJk2Stm6VAgO9PTrDsfUrqq9Ro0Y6cuTIOfcHBgZqy5YtXhiRd/BTAlQmKUlatUoaN04aMULq31+aPl1KT5eukOU772KnOKCmCDpwttxcKSFBat1aevnl8vt//3vpZz+T/vhH6cAB743vilD+TiCnrgHVw5I7cLZGjaRKlu8UGChdQct33mRZVtnWr5blEDN0oGrM0AH4oPIld/u0NYIOVIWgA/BBZy65c1AcpO3bt2vatGnq1auXIiIiFBQUpHbt2unBBx/U9u3bvT08n8BPCQCfY1n2Ue5Op1N+fn7eHg68yOVyafLkyerevbsSExO1efNmZWdny+Vyae/evZo/f7569eqljz/+2NtD9TreQwfgg9j6FZLb7dbIkSOVnJwsSbrllls0ZswYdezYUQUFBVq7dq0SExOVk5OjsWPHKjU1VTExMd4dtBcRdKAqRUX2xjLFxdJzz0kzZnh7RMYLCGiu4mJ7pi5JjRo19/KI4A2PPfaYkpOT1bBhQ3366acaetamTkOHDtXw4cMVFxenwsJCvfLKK5o1a5aXRut9LLkDVdm82Y65JPXp49WhGKu4WNq+Xfr4Y2nePP3C2V7Z2UGyLEu7d0eqb99+2r9/v3Jzc8XmlleG9evXa86cOZKkZcuWnRPzUj179tSQIUMkSd98802djc8XMUMHqrJhQ/nt3r29Nw5TuN3Snj1SaqqUliZt2ybt3Fn+S5OkGElfp6Tpm8bhCm57SouP9ZbrhEsRRyIUohA1adJEkZGRatq0qZo0aVLh48z7goODvfZt4tLMmDFDlmVp9OjRZcE+n6uuukqSlJWVVRdD81ns5Q7g8vF47E14tm2z452aau+2d/r0BT/tZEmJwocP14nH/0vDkoYpJT1FkuQscarZvmaKOBwhRzXeV2/QoEGV0S/95YCD73zH4cOH1bp16xqvxsTFxWnt2rWXaVS+jxk6gNphWdLhw3a0Sz/S0qRTp2r0MgtPnNCcY8fUZe1aTcmOl9vpVuvWrZWXl6eSkhJld8vWqatOKTItUg1yGlzwtU6dOqX9+/dr//79F3yew+FQeHj4BaNfel9YWNgVcV68N8//T05Ovqi3Vjp06FB2+9ChQ/roo4+0fPlybd++XUePHlVkZKQGDBighIQEXX/99bU5ZJ9A0AHUnGVJx45VXDZPS7O3zb0Emxs10pzDh+Vp00Z7iorUqUkntYtopz3ao7CwsIpP/pk0OHqwRrceLavA0vHjx3XixIkKH6X3FRQUVPHtWMrKylJWVpZ27dp1wef6+/tXGf3LteSfV5SnxG8SZcnShGsnKLpRdK2+fqn8/Hw99NBDysrK0n333afbb7+97GI5dSElxV6RiY6O1j/+8Y9qf16zZs3Kbs+dO1fPP/+8OnTooJtuuklRUVHauXOnPv30U3366adatGiR7rjjjlofuzex5A5cyK5dUmysffuDD6Q77/TueLzl5MmKy+apqfZ9l6JlS6lrV6l7d6lrV+W2aqW7fvMbZWZmSpIefvhhjR8/XidOndDsb2fr77v+XunLNAhooPHXjtddPe5SgF9Apc85ffq0Tp48ecHolz5efMZ7+Zeqtpf8p/5jqmZ/N1uSdHu327X49sW1NtYzbd++XWPHji37e7du3fTkk0+qc+fOl+XrnW3MmDH68MMP1bt3b61fv/6iXuPjjz9Ws2bNNHDgwAr3r169WkOGDFFYWJgOHz6soKCg2hiyTyDowIUsWSLdfrt9Oy1N6tLFu+OpCzk5FcOdmmrPxi9Fs2Z2vLt1sz+6dpUiIsoetixLjz/+uFauXClJuvbaazVv3rwKs8KNRzbqxbUvaueJnZV+ibbhbZXQP0HXt774pVTLspSfn19p8M++Lysrq9aOuK/Okv9x53ENXz5ckSGRCgsMU0ZWhlbcs0JD21d+9PelsCxLf/nLX/T++++X3ed0OjVmzBg9/PDDatDgwm91XKr4+Hh99tlnat++vTIyMmr99W+++WZ98cUX+v7779XHoDNXCDpwIU8/bV9dLSREys+X6nDZsU7k59uni525dH748KW9Znh4ebhL433GUmhlPvnkE/3pT3+SZF/betGiRWre/Nxzz90et5amLdVfv/+r8l35lb7Wje1u1NR+U9UyrOWlfR9VcLvdys7OvmD0S2/n51c+1ppI75+u/Cb5it0Qq6YhTfVt128V7gnXlMApat60+WVZ8t+8ebOee+457d69u+y+qKgoPf744xo8ePClfkvn9dvf/lavvfaaJGnnzp3q2LFjrb7+sGHDlJycrE2bNqlnz561+treRNCBC/n1r6X//V/puuuk777z9mguTWGhtGNHxaXzffsu7TVDQ8+Nd4sW9jVPq2nPnj0aO3asioqKJEkvvviibrjhhgt+zsnCk3p13atalr6s0seD/IN0f8/7Ne6acQr0C6z+93OZFBUVXTD4Z364XK5zPv9E6xPa22uvIg9Eqt3mdpKkg10OKjM2U9Fp0Wqxq0WlX7e6S/4RERHy96/8kKri4mK99957evPNNyuMbfDgwUpISKj0F69L9cknn2jkyJGS7M1jPv/88/P+clJQUKAFCxZo4sSJ1Xrt/fv3q1OnToqIiNDBgweNOruBoAMXctVV9mlXDz0kvf66t0dTfS6XfW73mcvme/bYp5FdrJAQO9hnLp23bl2jeJ87TJfuvfde7dxpL6OPGjVKM2qwE9+2Y9v0/NfPK/XH1Eofj24UrWlx0zSo7aCLHmNdqmzJf3/mfk3bM03ySHeevFP5x/PtXwayTyjt52kqalik7l91V+Dpi//FpTpL/i6XSwsWLNCGM/ZlCAkJ0cSJE3XnnXfWahg9Ho/69OmjTZs2SZK6dOmiSZMm6dprr1VwcLBycnKUnp6uNWvWaNmyZerRo0e1TlcrLi7W0KFDtWrVKi1YsED33HNPrY3ZFxB04HxOnpSaNLFvv/qq9Nvfenc851NSImVklC+bp6baB/OVlFz8awYG2scLlMa7a1cpJqbW33KYNWuWPvjgA0lS+/bttWDBghovE3ssjz5L/0xz181VzumcSp8zoM0ATes/TVc1vuqSx+wr6nrJX7J/4SgoKNDx48dlWZb8/f3l7++v1q1ba/bs2YqLi6uVryNJBw8e1K233qqtW7dW+dzJkyeX7Sp3Ph6PR/fee6/ee+89TZgwQW+88UZtDdVnEHTgfL76SrrxRvv2119L/ft7dzySPcPeu7fizHvHDntGfrH8/e0j+c844lzt29v3X0arV6/W1KlTJUmBgYFasGDBJb1XmluUq3nr52lJ6hJ5rHNXIgL8AnTPz+7R/T3vV0hAyEV/nfqosiX/8/0iUNmS/9mKi4u1f//+Cs9t3LixDl/q8ReVjDspKUlLlizR5s2bdfLkSTmdTjVp0kSxsbGKi4vTsGHDNGDAgAu+jmVZGj9+vObPn6+xY8fq3XffrdPT8OoKQQfO5y9/kR591F5SzsmxL9BSlzwe6eDBivFOT7ffC79YTqfUoUPFZfOOHe0ZeR06fvy4xowZo+zsbElSQkJCrZ0TvOPEDj2/5nltydxS6eNRDaP0aNyjGtJuyBWxQUxNXOgo/+PHj2vHjh3atm2bDhw4cE7427Rpo7S0NJ/7b+rxeDR+/Hi9/fbbuuuuu5SUlGTU++ZnIujA+dx3n/Tuu3bwdlZ+qlStsSzpyJGKO6ylpdlHoV8sh0Nq27biQWudOkle3t/c4/Fo0qRJWrdunSRp0KBBeumll2o1BJZl6e+7/q45383RiVMnKn1O31Z9NX3AdLWPaF9rX9dE2dnZWr58uT799NMKR7tLUklJiVq1aqVBgwbp4YcfVnh4uHcGeR5nxvzOO+/UwoULjY25RNCB8+vZU9qyRRo1yj4fvTYdO3buud45lb//W22tW5e/3929u9S5s9SwYe2Mtxa9++67mjt3riR7Z69FixZdthAUuAr05sY3tShlkdwe9zmP+zn9NKb7GD3U+yE1DPS9/1be4vF49N1332nZsmX697//rZKzjsdo0KCBfvnLXyo+Pl7dunXzuVm5ZH8PDz74oN555x3dfvvtev/99897JL8pCDpQmeJi+5Qsl0v6wx+kp56q+PjmzfaS/IkT0gMPSD+dYlOpkyfL41365/Hjlza+5s3L3+8ujXijRpf2mnVg27ZteuCBB+R2u+VwOPTaa6/VycYeu7N2a9baWVp3aF2ljzdp0ERTrp+iX3X8lU/G6WwtX2qpo/lH9ds+v9Wrt75aq6+dm5urRx55RGlpaec81rNnT8XHx2vo0KEKCfHt4xCeeeYZPfvsswoNDdWUKVMqjfmIESOMOg/d7F9XgIuVmlp+oNk115Tfb1n2FrCzZ9uXAZWkP/9Z6tdPatXK3st8+/aK53ofPXppY4mMtON95rnekZGX9ppeUFBQoCeffFLun/673X///XW2S1f7iPZ69ZZXtXLPSiV+m6jM/MwKj584dUIzv5qppalL9fjPH1enJp3qZFwX42DuQR3Nt/+f6tOq9v/7ZWRkVIh5ZGSkhg0bpuHDhysmJqbWv97lsnfvXkn2vvSlmxadLSYmxqigM0MHKrNggXTvvfbt/fulNm3sg9H++Efpn/+078/OtgNvWfZ10ouL7YPYLkWjRhVn3t262bus1YNZY1Vmzpyp5cuXS5J69Oiht956yytLoIXFhXp789tK2pqkYve5+7Y7HU6N6jpKE/tOVKMg31v1+CTtE41cbK8IbX14q65ufnWtvr7b7dbcuXN1/PhxDRkyRAMHDjR+qdoUBB2ozKOP2kvqkZH2snpGhn0e+s6ddthzcqSiIvvULn9/e7vTljXcarRhw/IZd2m8W7Y0It5nysvL08MPP6yvvvpKzZo1U3h4uBYtWqRWrVp5dVwHcg7opW9e0pr9ayp9vHFwY03qO0nxXeLldJh3ihPMQ9CBygwZIq1cKd1wg/Tkk/ZV1goL7dm4y2X/KdmngQUG2keOt2t3/tcLDrY3ajnziPPWrc3bG74S48eP19/+9jdJUkREhBYtWqSbb77Zy6Mqt3rfas36ZpYO5R6q9PFuzbopYUCCekT1qOORATVD0IHKNG1qz8z/+7+lb7+Vtm61zwsvfV/d4bA/LEsKCrJvd+pUHvhOnSrOvtu1uyLifbZNmzapd+/e8vPzk5+fn4qKirRixQoNHVr7Vwi7FC63S0lbkjR/83wVlRRV+pzhnYdr0nWTFBlS/45fwJWBoANVGTRI2rDBjrfHU/5R+qPTuLG9z/n/+3/Sf/yHvctaQOXX5b7SdOzYURkZGerQoYOio6O1evVqderUSVu3blVgHW9mUx1H8o7oL9/+RSv3rKz08dDAUE3sM1Gju42Wn7Puz2fOPp2tiOfty87Ovnm2pvSbUudjgO+68qYMQE3NmWNfQczPT2rQwJ69t21rb5favr19wFzLltLVV9vnfhNzSfZpQxkZGWUX+pg3b54SEhKUnp6uxMREbw+vUi3DWuqFm17Qq7e8qpjwmHMez3fl68W1L+o/P/5PbTyysc7Ht+Vo+e5317S45gLPxJWIGTpQHZZl76H+3Xf2x4YN0qlT5Y8HB0tLl9rnh19BXC5XpTPtffv2qVOnTrIsS927d9e0adM0duxYuVwu9e3bt+zUqDZt2nhh1NVT7C7Wh9s+1Bsb3tCp4lOVPueXHX+pyddPVlTDqDoZ08vfvawp/7Bn5ScTTioiJKJOvi7qB4IOXIySEiklRVq3zj73/NZb7ffLryCLFy/WSy+9pFGjRikhIaHsfsuyNHXqVK1ZYx893q9fP7388sv19mIYPxb8qLnr5mr5zuWVPh4SEKIJ107QXT3uUoDf5V2deXDZg5q/eb7aNGqj/VP3X9avhfqHoAO4KLfddpsOHDigyMhIffHFF2X3f/DBB5o1a5Yke1OSRYsWqUnpZWjrsU1HNumFtS9o54nK9/VvG95W0/tPV7/W/S7bGHq/0Vsbj2zUrzv9Wp/d9dll+zqon+rnr8wAvKqoqEiHDtmnebVo0aLs/h07dlS4LvUzzzxjRMwlqVfLXnrvtveUMCBBYUHnXnlvX/Y+TVo+SQkrEnQk70iFxzyWR/muS7smeYmnRKk/pkqSrmnO++c4F0EHUGP79u2Tx2Nfc7zdT+ffFxYW6oknnlBxsb372t13363+vnAN+Vrk5/TTHd3v0Md3fKwRXUZUuu/7yj0rNWrxKL254U0VlRRpx4kduvX9W/WLd36hJ758QiWekkpeuWrpx9N1uuS0JA6IQ+UIOoAa27NnT9nt9u3ty48mJiaW7Z/duXNnTZo0yRtDqxMRIRF6atBTeif+HXVr1u2cx11ul17f8LpGLR6lCZ9P0I8FP0qSvsj4Qklbki7qa555ffeeLXpe1GvAbAQdQI3t3r1bp0+f1sGDB/XHP/5RoaGhevrpp/XDDz/owIEDeuCBB3zyPPPa1j2qu94Z8Y6eHvS0woPDz3l827FtWn94vfZl7yvbie7NjW9qX/a+Gn+t0lPWQgND1SGiwyWNG2bioDgANeJyuRQXF6eNG89/HnZwcLAWLlyoLl26aO3atbrhhhvUoYPZEcotytW89fO0JHWJPJZHxe5i7c7eXXbbbbnVtEFTRYdFq3fL3nr916/XaI/4m9+7WV9kfKG41nFa++Day/idoL4i6ACqze12Kz4+XsnJyZKk8PBw/exnP9OxY8fkdrvVokULbdmyRbm5ufL391fXrl0VGBiomJgYLVmyxMujrxs7TuzQC1+/oOSdycotypXH8sjldskhhyxZCg0IVfPQ5vqfIf+jUd1GVft1W8xqocyCTE3sM1F/vfWvl/E7QH3FkjuAanvssceUnJwsp9Op2NhYxcbGqqCgQA0bNlTnzp31+uuv64477pDD4VBJSYmOHTsmSerUyXevL17bOjXppP+67r8UGhgqP4df2SVaS2fjhSWFOpR3SJP/MVn7c6p3LnlmfqYyC+xruHOEO86HoAOolvXr15edktaxY0f5+/vr4E/Xf3e73YqJidG9996rTZs2qVEj+zriRUVFeuKJJ/T73//ea+P2hi/3fKnGQY3VKqyVgvyD5JBDbsstSXJbbnksj7JPZ+vRfz5ardc784A4jnDH+XDVegDVMmPGDFmWpYEDByovL0+7d+9Wo0aNlJmZqcDAQH3zzTdlzw0NDVVOTo6aN2+ukSNHenHU3tG2cVtJ9gFsXZt2VZG7SJn5meeci1569HtVNh/dLMme5V8ddXWtjhXmIOgAqnT48GF9+eWXkqTVq1eX3Z+bm3vBz4uMvDIvNXpb19t0ovCE/r3338o6naWc0zkKahykPFeeMvMzVewpVoAzQI///PFqvV7pDL1jZEc1DGx4OYeOeoygA6hScnKyLub42bOPbH/vvfe0evVqbdiwQT/88INcLpfefvtt3XfffbU0Ut/gdDj1UO+H9FDvhyTZ+9sXuYuUczpHWaeztDtrt/q26qtmDZtV6/VKT1nj/XNcCEEHUKWUlBRJUnR0tEJCQsreO2/VqpXi4+N12223KSLi3Ct/NWtWMVhPPfWU9u3bp6ZNm6ply5bat6/m52PXRw6HQ8H+wQoODVbz0Obq0rRLtT+3sLhQ6SfSJUnXtrz2cg0RBiDoAKqUmWkfYd2iRQuNGzdOs2bN0vXXX685c+aoVatW1X6dt956S7GxsWrbtq3+/Oc/a8aMGZdryMb49uC3ZdvFXhd9nZdHA19G0AFUqbCwUJKUlZWlyZMna/LkyRf1OkOHDq3NYV0RFv6wUJLUIKCB+rcxa2981C6CDqBK0dHRkuwtX3ft2qWOHTt6eURm25O1R/tz9mv5zuV6e/PbkqQx3cco2D/YyyODL+M8dABVuummm8puT5w4UadPnz7vcwsKCvTaa6/VxbCMNTRpqH7x7i/0wtoX5LE86tSkk56/6XlvDws+jhk6gCrFx8erV69e2rRpk/71r3+pV69emjRpkq699loFBwcrJydH6enpWrNmjZYtW6YePXpo4sSJ3h52vZRXlKc9WXvUKKiROkR0UHzneE3rP02hgaHeHhp8HEEHUCWn06nPPvtMt956q7Zu3art27df8PKoffv2rcPRmSUsKEye33m8PQzUQwQdQLW0bt1a69atU1JSkpYsWaLNmzfr5MmTcjqdatKkiWJjYxUXF6dhw4ZpwIAB3h4ucMUh6ACqLSgoSOPHj9f48eO9PRQAZ+GgOAAADEDQAQAwgMO6mA2aAeAivPXWW1qzZo0k6YcfftDGjRs1YMCAsvPaR4wYoREjRnhxhED9xXvoAOrMmjVr9O6771a47+uvv9bXX38tSYqJiSHowEVihg4AgAF4Dx0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADEDQAQAwAEEHAMAABB0AAAMQdAAADPD/Advdz4VsEa4gAAAAAElFTkSuQmCC",
"text/html": [
"\n",
" \n",
"
\n",
" Figure\n",
"
\n",
"

\n",
"