 # О проекте
## Описание
**Kopycat** — это эмулятор аппаратных платформ для создания виртуальных копий физических устройств различной
архитектуры.
Основные особенности:
- Простота сборки нового устройства. Настройте свою платформу с помощью Kotlin.
- Лёгкая кастомизация. Создавайте собственные модули платформы на Kotlin.
- Кроссплатформенность. Kopycat использует JVM в качестве основы и может работать на Windows, Linux и OSX.
- Полное соответствие. Представление виртуальной платформы идентично схеме эмулируемого устройства.
- Поддержка множества архитектур: MIPS, ARM, MSP430, v850ES, x86_64.
- Режим пользовательского уровня. Возможность эмуляции отдельного ELF-файла без полной эмуляции системы.
Проект включает:
**Ядра процессоров:** ARMv6, ARMv6M, ARMv7, MIPS, MSP430, v850ES, x86_64, PowerPC (E500v2)
**Микроконтроллеры (MCU):** Cortex-M0, STM32F0xx, MSP430x44x, PIC32MZ, P2020, Atom 2758, ElanSC520
## История возникновения
Началом проекта послужила задача эмуляции устройства с нераспространенной архитектурой процессора.
Существующие платформы для эмуляции аппаратных устройств (в частности, QEMU) не поддерживали эту архитектуру.
Для решения возникшей проблемы было два пути:
1. Дополнение существующего эмулятора.
2. Написание собственного.
Было решено идти по второму пути.
Помимо эмуляции целевой архитектуры у проекта Kopycat были и другие цели, направленные на упрощение эмуляции специфичных
устройств, а именно:
- *Простота разработки*: для того, чтобы обеспечить удобство при добавлении новых архитектур и модулей, был выбран язык
программирования Kotlin, обладающий большим количеством удобных синтаксических конструкций.
- *Расширенные функции взаимодействия с эмуляцией*: в Kopycat присутствуют инструменты, позволяющие гибко взаимодействовать
с самим процессом эмуляции. В частности, так называемые "трейсеры", с помощью которых можно описать логику, выполняемую
при исполнении каждой ассемблерной инструкции устройства. Например, построить стек вызовов функции
программы без исходного кода или даже изменить логику работы эмулятора.
- *Интеграция с другими инструментами*: для того, чтобы Kopycat можно было использовать в паре с другим ПО, в нем были
реализованы протокол удаленного вызова процедур (RPC) и REST API.
Безусловно, JVM в совокупности с использованием трейсеров и других дополнительных функций эмулятора сильно сказывается на
скорости его работы. Поэтому еще одной важной функцией является создание "снапшотов" - снимков состояния работы, с помощью
которых можно возобновлять работу эмулятора с определенного момента.
## Архитектура
Kopycat имеет модульную архитектуру, благодаря которой можно быстро создать эмулятор произвольной аппаратной платформы.
Модули образуют иерархию компонентов, где эмулируемое устройство называется топ-модулем.
Взаимодействие модулей друг с другом обеспечивается шинной архитектурой устройств. Шины, в свою очередь, подключаются к
модулям через порты.
Пример простейшей архитектуры:
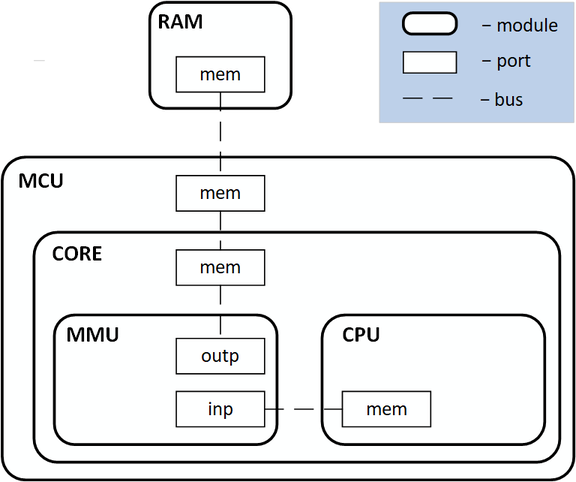
Такой подход позволяет при разработке устройства описывать его архитектуру идентично его физической блок-схеме.
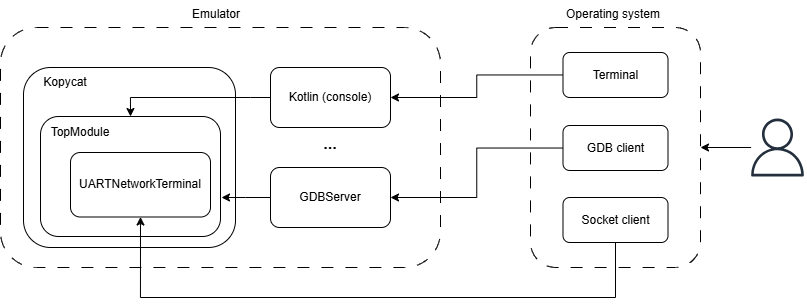
Сам топ-модуль инициализируется в экземпляре класса Kopycat. Для управления эмулятором предоставляется Kotlin-коносль.
Также доступны протоколы GDB, REST и RPC. Для того чтобы обеспечить возможность подключаться к системе эмулируемого
устройства используется экземпляр класса UartNetworkTerminal. В целом, виртуальное устройство и его взаимодействие с основной
операционной системой можно представить следующей схемой:
___
# Руководство пользователя
Целью данного руководства является обучение запуску и использованию эмулятора *Kopycat* "с нуля".
Краткий обзор:
- Первым шагом является получение дистрибутива Linux, который будет грузиться в эмуляторе. В разделе описывается сборка дистрибутива при помощи утилиты Buildroot.
- Далее идет описание процесса развертывания эмулятора для того, чтобы можно было начать работать с ним.
- И наконец, после запуска эмулятора, описание того, как происходит работа с сетью (E1000) и диском (SATA). Раздел позволит расширить навыки использования *Kopycat*, в частности, работать с сетью и передаваемым с хоста диском.
>**_Примечание:_** В руководстве подразумевается, что вы уже клонировали проект *Kopycat* на ваше устройство. Если нет:`git clone https://github.com/inforion/kopycat.git`
# О проекте
## Описание
**Kopycat** — это эмулятор аппаратных платформ для создания виртуальных копий физических устройств различной
архитектуры.
Основные особенности:
- Простота сборки нового устройства. Настройте свою платформу с помощью Kotlin.
- Лёгкая кастомизация. Создавайте собственные модули платформы на Kotlin.
- Кроссплатформенность. Kopycat использует JVM в качестве основы и может работать на Windows, Linux и OSX.
- Полное соответствие. Представление виртуальной платформы идентично схеме эмулируемого устройства.
- Поддержка множества архитектур: MIPS, ARM, MSP430, v850ES, x86_64.
- Режим пользовательского уровня. Возможность эмуляции отдельного ELF-файла без полной эмуляции системы.
Проект включает:
**Ядра процессоров:** ARMv6, ARMv6M, ARMv7, MIPS, MSP430, v850ES, x86_64, PowerPC (E500v2)
**Микроконтроллеры (MCU):** Cortex-M0, STM32F0xx, MSP430x44x, PIC32MZ, P2020, Atom 2758, ElanSC520
## История возникновения
Началом проекта послужила задача эмуляции устройства с нераспространенной архитектурой процессора.
Существующие платформы для эмуляции аппаратных устройств (в частности, QEMU) не поддерживали эту архитектуру.
Для решения возникшей проблемы было два пути:
1. Дополнение существующего эмулятора.
2. Написание собственного.
Было решено идти по второму пути.
Помимо эмуляции целевой архитектуры у проекта Kopycat были и другие цели, направленные на упрощение эмуляции специфичных
устройств, а именно:
- *Простота разработки*: для того, чтобы обеспечить удобство при добавлении новых архитектур и модулей, был выбран язык
программирования Kotlin, обладающий большим количеством удобных синтаксических конструкций.
- *Расширенные функции взаимодействия с эмуляцией*: в Kopycat присутствуют инструменты, позволяющие гибко взаимодействовать
с самим процессом эмуляции. В частности, так называемые "трейсеры", с помощью которых можно описать логику, выполняемую
при исполнении каждой ассемблерной инструкции устройства. Например, построить стек вызовов функции
программы без исходного кода или даже изменить логику работы эмулятора.
- *Интеграция с другими инструментами*: для того, чтобы Kopycat можно было использовать в паре с другим ПО, в нем были
реализованы протокол удаленного вызова процедур (RPC) и REST API.
Безусловно, JVM в совокупности с использованием трейсеров и других дополнительных функций эмулятора сильно сказывается на
скорости его работы. Поэтому еще одной важной функцией является создание "снапшотов" - снимков состояния работы, с помощью
которых можно возобновлять работу эмулятора с определенного момента.
## Архитектура
Kopycat имеет модульную архитектуру, благодаря которой можно быстро создать эмулятор произвольной аппаратной платформы.
Модули образуют иерархию компонентов, где эмулируемое устройство называется топ-модулем.
Взаимодействие модулей друг с другом обеспечивается шинной архитектурой устройств. Шины, в свою очередь, подключаются к
модулям через порты.
Пример простейшей архитектуры:

Такой подход позволяет при разработке устройства описывать его архитектуру идентично его физической блок-схеме.
Сам топ-модуль инициализируется в экземпляре класса Kopycat. Для управления эмулятором предоставляется Kotlin-коносль.
Также доступны протоколы GDB, REST и RPC. Для того чтобы обеспечить возможность подключаться к системе эмулируемого
устройства используется экземпляр класса UartNetworkTerminal. В целом, виртуальное устройство и его взаимодействие с основной
операционной системой можно представить следующей схемой:

___
# Руководство пользователя
Целью данного руководства является обучение запуску и использованию эмулятора *Kopycat* "с нуля".
Краткий обзор:
- Первым шагом является получение дистрибутива Linux, который будет грузиться в эмуляторе. В разделе описывается сборка дистрибутива при помощи утилиты Buildroot.
- Далее идет описание процесса развертывания эмулятора для того, чтобы можно было начать работать с ним.
- И наконец, после запуска эмулятора, описание того, как происходит работа с сетью (E1000) и диском (SATA). Раздел позволит расширить навыки использования *Kopycat*, в частности, работать с сетью и передаваемым с хоста диском.
>**_Примечание:_** В руководстве подразумевается, что вы уже клонировали проект *Kopycat* на ваше устройство. Если нет:`git clone https://github.com/inforion/kopycat.git`
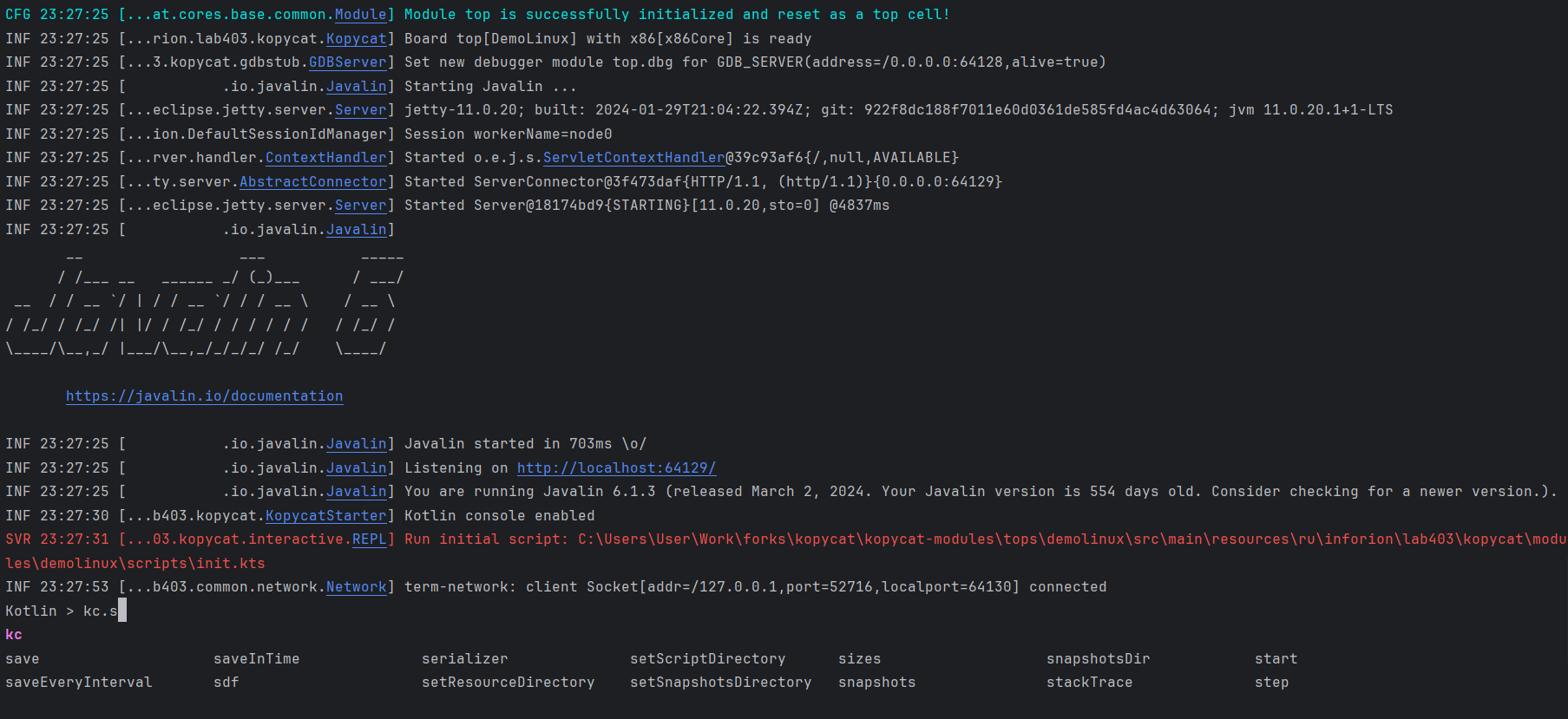
Скриншоты
Kotlin-консоль:
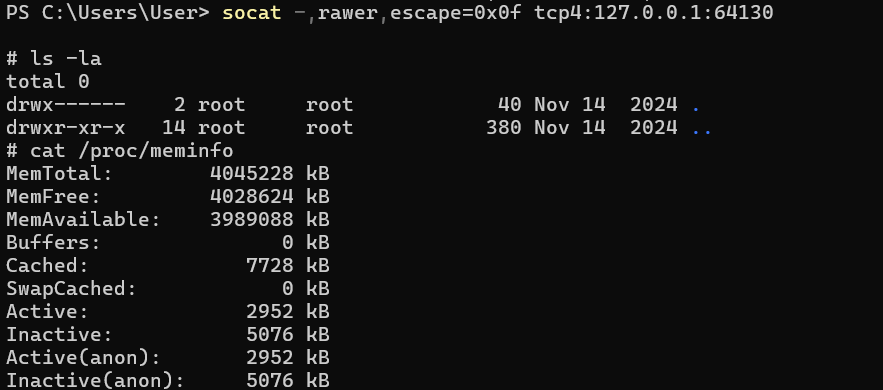
Терминал socat:
Сообщение в консоли о подключении gdb-клиента:

Отладка через IDA:
---
### Предварительные требования
Для использования Kopycat убедитесь, что у вас установлены:
- **Java Development Kit (JDK) 11**
- **Socat**: Для взаимодействия с терминалом
- **Docker или Podman** (опционально)
---
## 1. Подготовка дистрибутива при помощи Buildroot
**Buildroot** — это инструмент, который упрощает и автоматизирует процесс сборки полноценной Linux-системы для встраиваемых устройств, используя механизм кросс-компиляции.
Настроить toolchain и конфигурацию ядра можно командами `make menuconfig` и `make linux-menuconfig`, предоставляющими графический интерфейс. Сборка происходит выполнением команды `make`
После конфигурирования и сборки, артефакты будут лежать в директории `.\output\images`
Подробнее про возможности Buildroot в официальной документации - [Buildroot - Making Embedded Linux Easy](https://buildroot.org/docs.html)
### Сборка ядра для kopycat x86 (Version 0.11.0+)
В директории `.\kopycat-modules\tops\demolinux\src\main\buildroot` находится ContainterFile для сборки образа с Buildroot со сконфигурированным ядром Linux для x86. Для сборки можно использовать Docker или Podman (команды аналогичные).
1. Переходим в нужную директорию:
`cd .\kopycat-modules\tops\demolinux\src\main\buildroot`
2. Собираем образ:
`docker build -f .\Containerfile -t my-buildroot .`
3. После того как образ был собран, вытаскиваем из него ядро и root.cpio:
```
docker create --name temp-container my-buildroot
docker cp temp-container:/build/buildroot/output/images ./images
docker rm temp-container
```
Образ ядра и файловой системы будут лежать в директории `.\kopycat-modules\tops\demolinux\src\main\buildroot\images`
Для сборки ядра под MIPS аналогичные шаги в директории `.\kopycat-modules\tops\demolinux_mips\src\main\buildroot`
### Сборка ядра для kopycat x86 (Version 0.10.0)
В директории `.\kopycat-modules\tops\demolinux\src\main\buildroot` находятся архив с buildroot (`buildroot-2023.11.1.tar.gz`) sh скрипты для конфигурирования и сборки.
1. Распаковываем архив с buildroot:
```
tar xf buildroot-2023.11.1.tar.gz
mv buildroot-2023.11.1 buildroot-unpacked
```
2. Запускаем скрипт для сборки
`./Build.sh`
3. Образ ядра и файловой системы будут лежать в `.\kopycat-modules\tops\demolinux\src\main\buildroot\buildroot-unpacked/output/images/`
>*Примечание*: Для Windows можно использовать WSL или Docker в качестве виртуального окружения для запуска скриптов и сборки ядра
---
## 2. Развертывание эмулятора
### 2.1 Руководство для Linux
#### Шаги для запуска и проверки Demolinux с Kopycat:
1. **Проверьте версию Java**
Убедитесь, что используется Java 11:
```bash
java --version
```
Если установлено несколько версий JDK, установите переменные окружения `PATH` и `JAVA_HOME`, указывая на JDK 11.
2. **Соберите kotlin-extensions**
```bash
git clone https://github.com/inforion/kotlin-extensions.git
cd kotlin-extensions
./gradlew publishToMavenLocal
```
3. **Откройте проект и соберите Kopycat**
```bash
./gradlew createKopycatConfig
./gradlew buildKopycatModule
```
4. **Установите socat**
```bash
sudo apt install socat
```
5. **Запустите эмулятор с помощью скрипта**
Перед запуском эмулятора, убедитесь, что у вас есть все необходимые для работы ресурсы (ядро и rootfs для demolinux).
Они должны находиться в директории `./kopycat-modules/**/src/main/resources/**/binaries` модуля или в `.
/kopycat/resources/**/binaries` (если их нет, создайте их по инструкции в [первом пункте руководства](#1-подготовка-дистрибутива-при-помощи-buildroot)
и перенесите в директорию `./kopycat-modules/**/src/main/resources/**/binaries`). Первая директория будет
использоваться, чтобы положить ядро в jar во время сборки, а вторая, чтобы получить его во время выполнения программы.
Запустите скрипт:
```bash
./kopycat-private/temp/config/bash/demolinux-default.sh
```
>**_Примечание:_** Также, стоит учесть, что для demolinux_x86, например, Kopycat по-умолчанию ищет ядро и rootfs как "bzImage.gz" и "rootfs.cpio.gz". Если вы хотите переопределить названия ресурсов (например, чтобы использовать их без сжатия), вы можете добавить их в параметры топ-модуля в команде запуска программы `-p "...,bzImageName=bzImage,initRdName=rootfs.cpio"`
>**_Примечание:_** Ядро, предоставляемое в процессе выполнения, имеет больший приоритет.
6. **Запустите эмуляцию устройства в Kopycat**
В консоли Kopycat выполните:
```bash
kc.start()
```
Если у вас есть **снапшот**, в котором система уже запущена и готова к использованию, загрузите его, чтобы
избежать ожидания и сразу получить доступ к консоли:
```bash
kc.load("snapshot_name.zip")
```
>**_Примечание_**: Снапшоты (снимок состояния) позволяют сохранять состояние устройство и загружать его, если вам
> нужно перейти к этому состоянию. Чтобы создать снапшот, используйте команду `kc.save("snapshot_name")`.
> Снапшоты по умолчанию находятся в директории `./temp/demolinux` (для demolinux). Если вы хотите загрузить снапшот,
> убедитесь, что он также находится в этой директории.
>**_Примечание_**: Директория снапшотов определяется в команде запуска эмулятора опцией "-w".
7. **Подключитесь через socat**
```bash
socat rawer,escape=0x0f tcp4:localhost:64130
```
8. **Проверьте работу Demolinux**
После того как система загрузится и появится доступ к консоли, введите следующие команды и дождитесь вывода:
```bash
ls -l
cat /proc/meminfo
```
---
### 2.2 Руководство для Windows
#### Шаги для запуска и проверки верхнего модуля Demolinux с Kopycat:
1. **Проверьте версию Java**
Убедитесь, что используется Java 11:
```powershell
java --version
```
Если установлено несколько версий JDK, настройте `PATH` и `JAVA_HOME` на путь к JDK 11.
2. **Соберите kotlin-extensions**
```powershell
git clone https://github.com/inforion/kotlin-extensions.git
cd kotlin-extensions
./gradlew publishToMavenLocal
```
3. **Откройте и соберите Kopycat**
```powershell
./gradlew createKopycatConfig
./gradlew buildKopycatModule
```
4. **Установите socat**
Есть разные способы установить/собрать socat под Windows.
Например, вы можете установить его при помощи терминала msys:
```
pacman -S socat
```
Опционально, добавьте путь к socat в Path, чтобы можно было вызывать его из Powershell
5. **Запустите эмулятор с помощью PowerShell-скрипта**
Перед запуском эмулятора, убедитесь, что у вас есть все необходимые для работы ресурсы (ядро и rootfs для demolinux).
Они должны находиться в директории `./kopycat-modules/**/src/main/resources/**/binaries` модуля или в `.
/kopycat/resources/**/binaries` (если их нет, создайте их по инструкции в [первом пункте руководства](#1-подготовка-дистрибутива-при-помощи-buildroot)
и перенесите в директорию `./kopycat-modules/**/src/main/resources/**/binaries`). Первая директория будет
использоваться, чтобы положить ядро в jar во время сборки, а вторая, чтобы получить его во время выполнения программы.
Запустите скрипт:
```powershell
.\kopycat-private\temp\config\powershell\demolinux-default.ps1
```
>**_Примечание:_** Также, стоит учесть, что для demolinux_x86, например, Kopycat по-умолчанию ищет ядро и rootfs как "bzImage.gz" и "rootfs.cpio.gz". Если вы хотите переопределить названия ресурсов (например, чтобы использовать их без сжатия), вы можете добавить их в параметры топ-модуля в команде запуска программы `-p "...,bzImageName=bzImage,initRdName=rootfs.cpio"`
>**_Примечание:_** Ядро, предоставляемое в процессе выполнения, имеет больший приоритет.
6. **Запустите эмуляцию устройства в Kopycat**
В консоли Kopycat выполните:
```powershell
kc.start()
```
Если у вас есть **снапшот**, в котором система уже запущена и готова к использованию, загрузите его, чтобы
избежать ожидания и сразу получить доступ к консоли:
```powershell
kc.load("snapshot_name.zip")
```
>**_Примечание_**: Снапшоты (снимок состояния) позволяют сохранять состояние устройство и загружать его, если вам
> нужно перейти к этому состоянию. Чтобы создать снапшот, используйте команду `kc.save("snapshot_name")`.
> Снапшоты по умолчанию находятся в директории `./temp/demolinux` (для demolinux). Если вы хотите загрузить снапшот,
> убедитесь, что он также находится в этой директории.
>**_Примечание_**: Директория снапшотов определяется в команде запуска эмулятора опцией "-w".
7. **Подключитесь с помощью socat**
Выполните:
```Powershell
socat rawer,escape=0x0f tcp4:localhost:64130
```
>**_Примечание_**: Мы используем socat с режимом rawer, чтобы отключить эхо и передавать управляющие символы
> эмулируемой системе. Если по какой-либо причине вы не можете запускать socat в режиме rawer, попробуйте `socat pty,raw,echo=0,iexten=0,isig=0,ixon=0,icanon=0,min=1,time=0,escape=0x0f tcp4:localhost:64130`
8. **Проверьте работу Demolinux**
После того как система загрузится и появится доступ к консоли, введите следующие команды и дождитесь вывода:
```bash
ls -l
cat /proc/meminfo
```
---
### 2.3 Руководство по запуску Kopycat в контейнере Docker
Вы можете запустить Kopycat используя Dockerfile в репозитории проекта
1. **Убедитесь, что у вас установлен Docker**
```bash
docker --version
```
2. **Соберите Docker-образ**
Dockerfile находится в директории проекта.
```bash
docker build -t kopycat .
```
3. **Запустите Docker-контейнер**
Чтобы запустить контейнер, выполните команду:
```bash
docker run -it --name kopycat-container kopycat /bin/bash
```
Рабочая директория контейнера будет иметь следующее содержание:
```
opt/kopycat
├── demolinux-default-net.sh
├── demolinux-default-x32.sh
├── demolinux-default.sh
├── kopycat-modules // runtime scripts
└── production // JARs
```
Если вы хотите использовать свое ядро или снапшоты, вы можете использовать volume:
```bash
docker run \
-v ./temp:/opt/kopycat/temp/demolinux \
-v ./pathToTheResourceDir:/opt/kopycat/resources/ru/inforion/lab403/kopycat/modules/demolinux/binaries \
-it --name kopycat-container kopycat /bin/bash
```
Первый volume содержит снапшоты, а второй это директория с ядром, rootfs и так далее.
Вы также можете использовать `docker cp` вместо volume.
4. **Запустите Kopycat внутри контейнера**
```bash
./demolinux-default.sh
```
5. **Запустите процесс эмуляции в Kopycat**
В консоли Kopycat выполните:
```bash
kc.start()
```
Если у вас есть **снапшот**, в котором система уже запущена и готова к использованию, загрузите его, чтобы
избежать ожидания и сразу получить доступ к консоли:
```bash
kc.load("snapshot_name.zip")
```
>**_Примечание_**: Снапшоты (снимок состояния) позволяют сохранять состояние устройство и загружать его, если вам
> нужно перейти к этому состоянию. Чтобы создать снапшот, используйте команду `kc.save("snapshot_name")`.
> Снапшоты по умолчанию находятся в директории `./temp/demolinux` (для demolinux). Если вы хотите загрузить снапшот,
> убедитесь, что он также находится в этой директории.
>**_Примечание_**: Директория снапшотов определяется в команде запуска эмулятора опцией "-w".
6. **Подключитесь при помощи Socat в Docker-контейнере**
```bash
docker exec -it kopycat-container bash
socat -,rawer,escape=0x0f tcp:localhost:64130
```
>**_Примечание_**: Мы используем socat с режимом rawer, чтобы отключить эхо и передавать управляющие символы
> эмулируемой системе. Если по какой-либо причине вы не можете запускать socat в режиме rawer, попробуйте `socat pty,raw,echo=0,iexten=0,isig=0,ixon=0,icanon=0,min=1,time=0,escape=0x0f tcp4:localhost:64130`
7. **Проверьте работу Demolinux**
После того как система загрузится и появится доступ к консоли, введите следующие команды и дождитесь вывода:
```bash
ls -l
cat /proc/meminfo
```
---
## 3. Проверка работы сети (E1000) и диска (SATA) в эмуляторе (demolinux x86)
### 3.1 Диск
Создаем диск в корне проекта `fallocate -l 30M disks/demo.bin`
>**_Примечание:_** Обратите внимание, что fallocate может не сработать, если вы пытаетесь его использовать, например,
> в файловой системе хоста в WSL. В этом случае создайте файл в директории /tmp или /opt и перенесите его в
> директорию disks в корне kopycat
Можно проверить, что эмулятор видит диск как устройство:
```
$ fdisk -l
```
*Вывод:*
```
Disk /dev/sda: 0 MB, 65536 bytes, 128 sectors
0 cylinders, 255 heads, 63 sectors/track
Units: sectors of 1 * 512 = 512 bytes
Disk /dev/sda doesn't contain a valid partition table
Disk /dev/sdb: 30 MB, 31457280 bytes, 61440 sectors // Наш диск
3 cylinders, 255 heads, 63 sectors/track
Units: sectors of 1 * 512 = 512 bytes
Disk /dev/sdb doesn't contain a valid partition table
```
Далее, требуется создать на диске таблицу разделов и один раздел ext4. Удобнее делать это на хосте (или в WSL для
Windows).
>**_Примечание:_** При создании таблицы разделов на хосте стоит выключить эмулятор
Привяжем файл к устройству:
```bash
$ sudo losetup -fP --show ./demo.bin
```
Должно вернутся имя устройство, например, /dev/loop0
Создадим таблицу разделов:
```bash
$ sudo fdisk /dev/loop0
```
Последовательность ввода в интерфейсе fdisk:
```
o очистить старую таблицу и создать DOS
n новый раздел
p primary
1 номер 1
первый сектор –
последний сектор – (весь диск)
w записать и выйти
```
Форматируем раздел и создаем файловую систему:
```bash
$ sudo mkfs.ext4 /dev/loop0p1 -L GUESTDISK
```
*Вывод*
```bash
mke2fs 1.46.5 (30-Dec-2021)
Creating filesystem with 7672 4k blocks and 7680 inodes
Allocating group tables: done
Writing inode tables: done
Creating journal (1024 blocks): done
Writing superblocks and filesystem accounting information: done
```
Отвязываем устройство:
```bash
$ sudo losetup -d /dev/loop0
```
Теперь, когда на диске есть отформатированный раздел, можно попытаться смонтировать его в эмуляторе и проверить работу
В эмуляторе:
```bash
$ partprobe /dev/sdb
sdb: sdb1
$ mkdir data
$ mount /dev/sdb1 data
EXT4-fs (sdb1): mounted filesystem with ordered data mode. Opts: (null)
$ cd data
$ echo test test test > testfile
$ cd ..
$ umount data && sync
```
В диск был записан файл testfile с содержимым "test test test".
Можем убедиться в наличии файла и его содержимого вновь на хосте (или WSL):
```bash
$ sudo losetup --find --show --partscan ./demo.bin
/dev/loop0
$ sudo mkdir /mnt/testdisk
$ sudo mount /dev/loop0p1 /mnt/testdisk
$ ls /mnt/testdisk
lost+found testfile
$ cat /mnt/testdisk/testfile
test test test
```
### 3.2 Сеть
Для проверки работы сети требуется поднять виртуальный TAP-интерфейс на хосте на порту, указанном в параметрах
запуска эмулятора.
>**_Примечание:_** Поднятие TAP-интерфейса нужно выполнить **ДО ЗАПУСКА ЭМУЛЯТОРА!**
```bash
sudo socat tun:192.168.19.2/24,tun-type=tap,iff-up,iff-no-pi tcp-listen:30003
```
В Windows команда socat остается неизменной, хотя запускается в WSL, однако предварительно требуется выполнить проброс
портов.
Узнаем ip-адрес wsl в подсети хоста:
```Powershell
PS wsl hostname -I
172.27.181.15
```
Прокинем порты, используя адрес, полученный на последнем шаге (Powershell):
```Powershell
PS netsh interface portproxy add v4tov4 `
>> listenaddress=0.0.0.0 listenport=30003 `
>> connectaddress=172.27.181.15 connectport=30003
PS New-NetFirewallRule -DisplayName "WSL PortProxy 30003" `
>> -Direction Inbound -Protocol TCP -LocalPort 30003 -Action Allow
```
После чего можно поднять сеть приведенной ранее командой socat.
Для теста поднимем также python http.server в WSL в директории с каким-нибудь тестовым файлом:
`python3 -m http.server`
Наконец, проверка работы сети в эмуляторе.
>**_Примечание:_** Некоторые команды требуют ожидания
Поднимем сеть eth0:
```
$ ip link set eth0 up
```
*Вывод:*
```
IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
e1000e: eth0 NIC Link is Up 1000 Mbps Full Duplex, Flow Control: Rx/Tx
IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready
```
Назначим IP-адрес:
```
$ ip addr add 192.168.19.10/24 dev eth0
```
Попробуем скачать файл test с хоста:
```
$ wget http://192.168.19.2:8000/test
```
*Вывод:*
```
Connecting to 192.168.19.2:8000 (192.168.19.2:8000)
saving to 'test'
test 100% |********************************| 10 0:00:00 ETA
'test' saved
```
Убедимся, что содержимое скачанного файла совпадает с содержимым этого файла на хосте:
```
$ cat test
```
*Вывод:*
```
test file
```
### 3.3 Глобальная сеть
Если вы хотите подключиться к глобальной сети, потребуется выполнить несколько дополнительных шагов.
Мы настроим NAT между интерфейсом TAP, созданным в предыдущей части для связи эмулятора и хоста,
и интерфейсом, который используется для подключения к глобальной сети на хосте (WSL для Windows).
Сначала необходимо включить IP Forwarding. Добавьте следующую строку в файл `/etc/sysctl.conf`:
```Bash
sudo sysctl -w net.ipv4.ip_forward=1
```
Далее нужно настроить NAT с помощью iptables:
```
sudo iptables -t nat -A POSTROUTING -s 192.168.19.0/24 -o eth0 -j MASQUERADE
sudo iptables -A FORWARD -i tap0 -o eth0 -j ACCEPT
sudo iptables -A FORWARD -i eth0 -o tap0 -m state --state RELATED,ESTABLISHED -j ACCEPT
```
*eth0* здесь это интерфейс для доступа к глобальной сети.
Вы можете определить свой интерфейс с помощью команды `ip addr show`
Теперь нужно настроить маршрут по умолчанию в эмуляторе:
```
$ ip route show
192.168.19.0/24 dev eth0 scope link src 192.168.19.10
$ ip route add default via 192.168.19.2 dev eth0
$ ip route show
default via 192.168.19.2 dev eth0
192.168.19.0/24 dev eth0 scope link src 192.168.19.10
```
192.168.19.10 - адрес хоста в созданной в предыдущем пункте сети.
Наконец, попробуем связаться с 8.8.8.8 (Google public DNC):
```
$ ping 8.8.8.8
```
Получим:
```
PING 8.8.8.8 (8.8.8.8): 56 data bytes
64 bytes from 8.8.8.8: seq=0 ttl=100 time=4.000 ms
64 bytes from 8.8.8.8: seq=1 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=2 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=3 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=4 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=5 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=6 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=7 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=8 ttl=100 time=0.000 ms
64 bytes from 8.8.8.8: seq=9 ttl=100 time=0.000 ms
^C
--- 8.8.8.8 ping statistics ---
10 packets transmitted, 10 packets received, 0% packet loss
round-trip min/avg/max = 0.000/0.400/4.000 ms
```