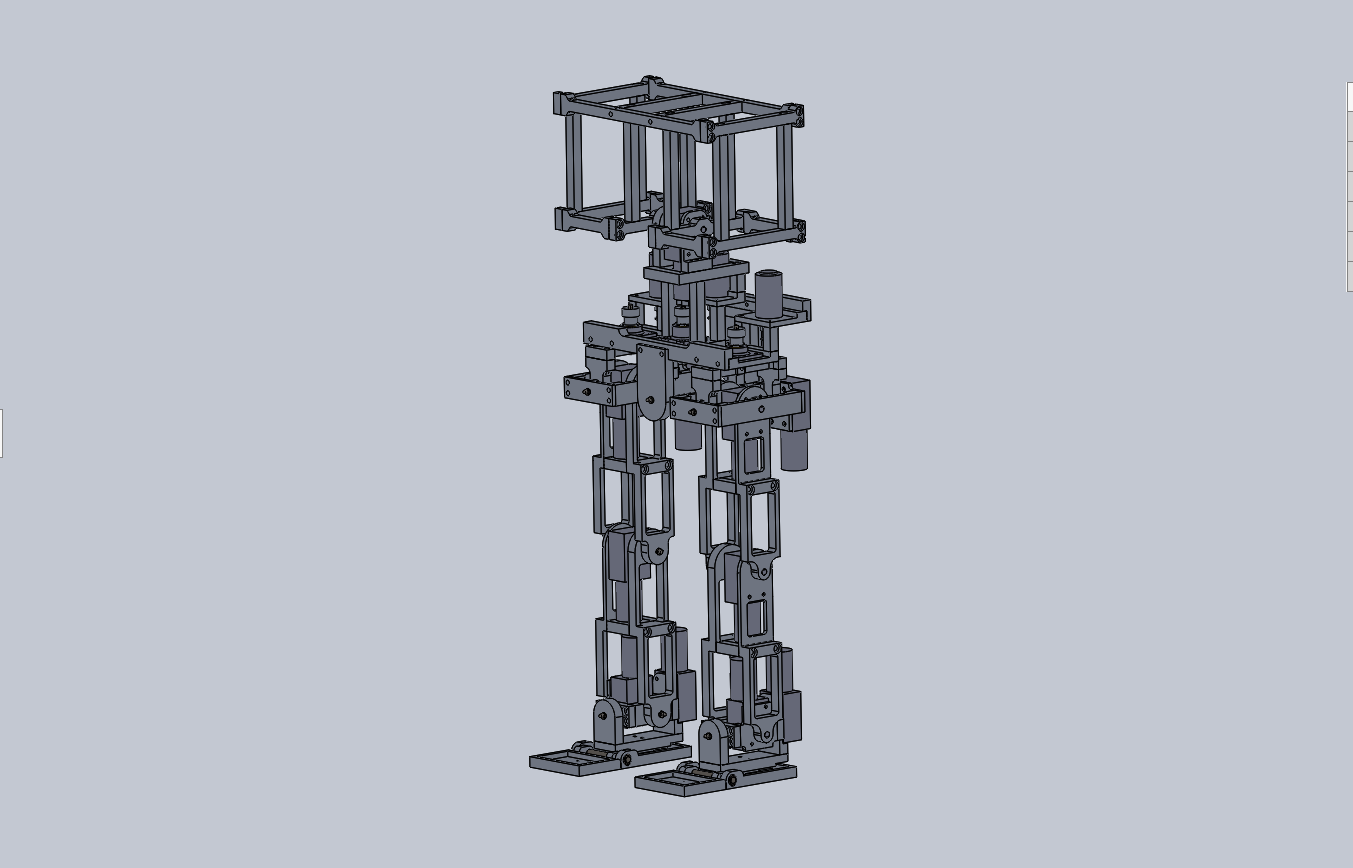
14 DoF Biped robot having two 3 DoF hip joint, two 1 DoF knee joint, two 2 DoF ankle joint and a 2 DoF waist joint
Energy efficient Human lIke Walking· 14 DoF Biped robot having two 3 DoF hip joint, two 1 DoF knee joint, two 2 DoF ankle joint and a 2 DoF waist joint
Energy efficient Human lIke Walking
14 DoF Biped robot having two 3 DoF hip joint, two 1 DoF knee joint, two 2 DoF ankle joint and a 2 DoF waist joint