

| k-Wave Toolbox |
|
| On this page… |
|---|
|
Creating the k-space grid and defining the medium properties |
This example provides a simple demonstration of using k-Wave for the simulation and detection of the pressure field generated by an initial pressure distribution within a one-dimensional heterogeneous propagation medium. It builds on the Homogeneous Propagation Medium and Heterogeneous Propagation Medium examples.
Simulations in one-dimension are performed in an analogous fashion to those in two-dimensions. The medium discretisation is again performed by makeGrid using the inputs for a single dimension. The properties of a heterogeneous acoustic propagation medium are also given as one-dimensional column vectors.
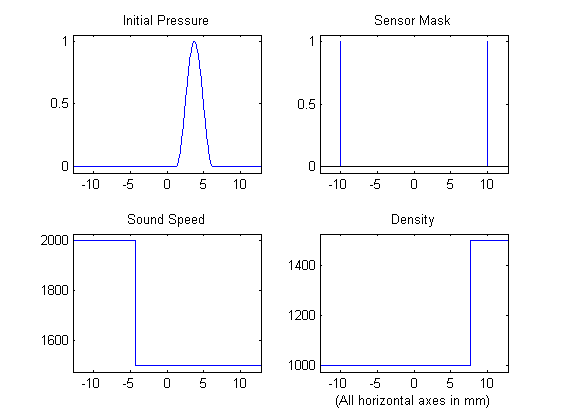
% create the computational grid Nx = 512; % number of grid points in the x (row) direction dx = 0.05e-3; % grid point spacing in the x direction [m] kgrid = makeGrid(Nx, dx); % define the properties of the propagation medium medium.sound_speed = 1500*ones(Nx, 1); % [m/s] medium.sound_speed(1:round(Nx/3)) = 2000; % [m/s] medium.density = 1000*ones(Nx, 1); % [kg/m^3] medium.density(round(4*Nx/5):end) = 1500; % [kg/m^3]
As in two-dimensions, the initial pressure distribution is set using a vector which contains the initial pressure values for each grid point within the computational domain. Here a smoothly varying pressure function is defined using a portion of a sinusoid.
% create initial pressure distribution using a smoothly shaped sinusoid x_pos = 280; % [grid points] width = 100; % [grid points] height = 1; % [Pa] in = (0:pi/(width/2):2*pi).'; source.p0 = [zeros(x_pos, 1); ((height/2)*sin(in-pi/2)+(height/2)); zeros(Nx - x_pos - width - 1, 1)];
Again the sensor mask, which defines the locations where the pressure field is recorded at each time-step, can be given as a list of Cartesian coordinates, a binary mask, or the grid coordinates of two opposing ends of a line. In this example, a Cartesian sensor mask with two points is defined.
% create a Cartesian sensor mask sensor.mask = [-10e-3, 10e-3]; % [mm]
The computation is started by passing the four input structures, kgrid, medium, source, and sensor to kspaceFirstOrder1D. To record long enough to capture the reflections from the heterogeneous interfaces, kgrid.t_array is created using makeTime, with the total simulation time set explicitly. By default, a visualisation of the propagating wave-field and a status bar are displayed.
% set the simulation time to capture the reflections t_end = 2.5*kgrid.x_size/max(medium.sound_speed(:)); % define the time array [kgrid.t_array, dt] = makeTime(kgrid, medium.sound_speed, [], t_end); % run the simulation sensor_data = kspaceFirstOrder1D(kgrid, medium, source, sensor, 'PlotLayout', true);
As the function runs, status updates and computational parameters are printed to the command line.
Running k-Wave simulation... start time: 18-Oct-2011 09:27:02 reference sound speed: 2000m/s dt: 7.5ns, t_end: 31.995us, time steps: 4267 input grid size: 512 grid points (25.6mm) maximum supported frequency: 15MHz smoothing p0 distribution... precomputation completed in 0.5824s starting time loop... estimated simulation time 1.9824s... computation completed in 5.1936s
A plot of the initial pressure distribution, sensor mask, and medium properties (returned using 'PlotLayout' set to true) is given below.
When the time loop has completed, the function returns the recorded time series at each of sensor points defined by sensor_mask. The ordering is again dependent on whether a Cartesian or binary sensor mask is used. A visualisation of the recorded sensor data is given below.

Note, in some cases the animated visualisation can significantly slow down the simulation. The computational speed can be increased by switching off the animations by setting the optional input 'PlotSim' to false.
| |
Setting An Initial Pressure Gradient | Simulations In Three Dimensions | |
© 2009-2014 Bradley Treeby and Ben Cox.
