 |
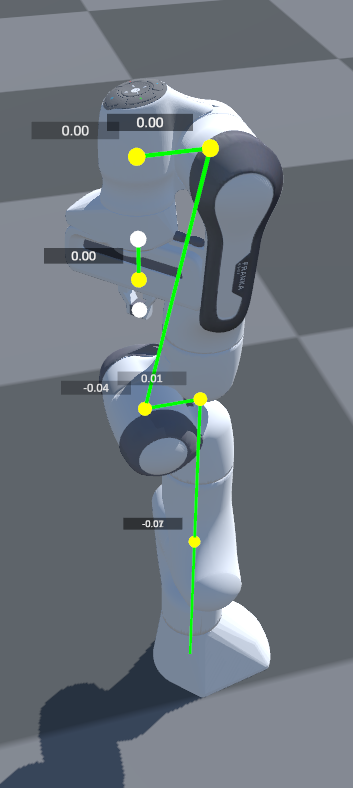
| [test_articulation_ik](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_articulation_ik.py) | Native IK |
|
| [test_articulation_ik](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_articulation_ik.py) | Native IK | 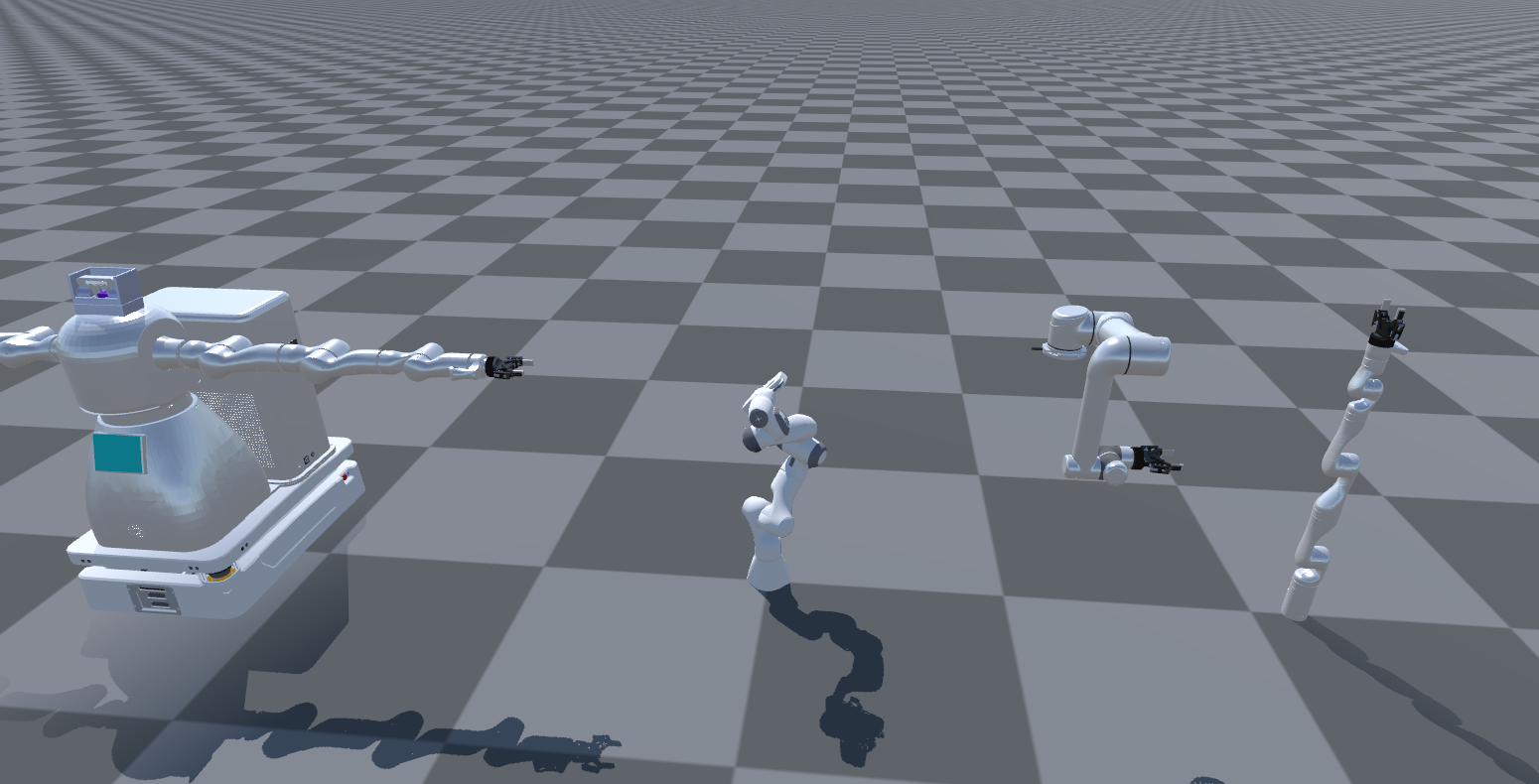 |
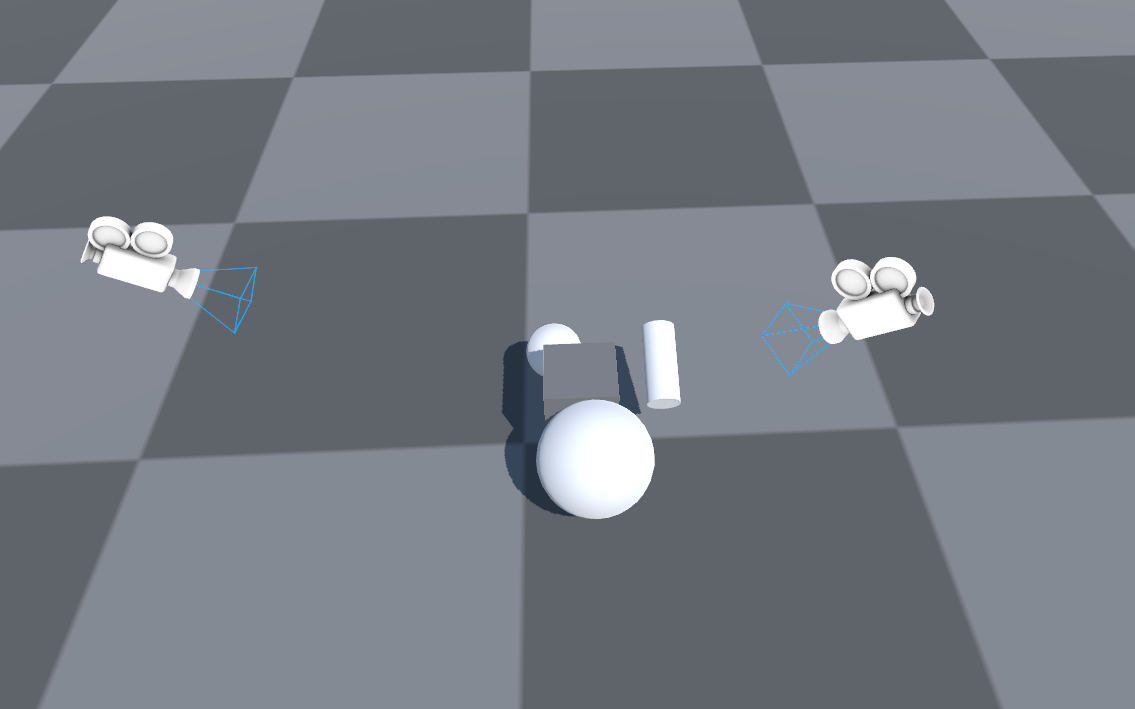
| [test_camera_image](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_camera_image.py) | Camera Screenshot Example | |
| [test_custom_message](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_custom_message.py) | Custom Messages and Dynamic Messages | |
| [test_debug](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_debug.py) | Loop Display of Various Debug Modules |
|
| [test_camera_image](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_camera_image.py) | Camera Screenshot Example | |
| [test_custom_message](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_custom_message.py) | Custom Messages and Dynamic Messages | |
| [test_debug](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_debug.py) | Loop Display of Various Debug Modules | 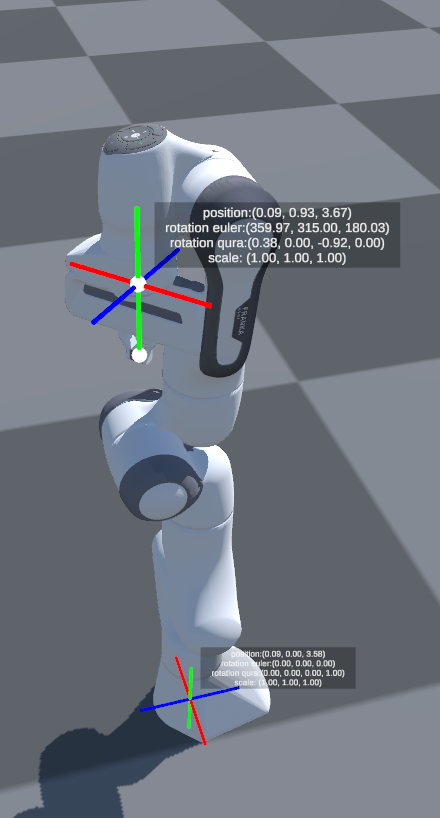
 |
| [test_digit](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_digit.py) | Interactive Digit Tactile Sensor Simulation |
|
| [test_digit](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_digit.py) | Interactive Digit Tactile Sensor Simulation |  |
| [test_gelslim](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_gelslim.py) | GelSlim tactile sensor simulation |
|
| [test_gelslim](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_gelslim.py) | GelSlim tactile sensor simulation | 
 |
| [test_grasp_sim](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_grasp_sim.py) | Franka Grasping Test |
|
| [test_grasp_sim](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_grasp_sim.py) | Franka Grasping Test |  |
| [test_grasp_pose](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_grasp_pose.py) | Franka Grasp Point Preview | |
| [test_heat_map](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_heat_map.py) | Interactive Heatmap |
|
| [test_grasp_pose](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_grasp_pose.py) | Franka Grasp Point Preview | |
| [test_heat_map](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_heat_map.py) | Interactive Heatmap |  |
| [test_cloth_attach](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_cloth_attach.py) | Cloth Simulation | |
| [test_humanbody_ik](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_humanbody_ik.py) | Human Body IK Interface | |
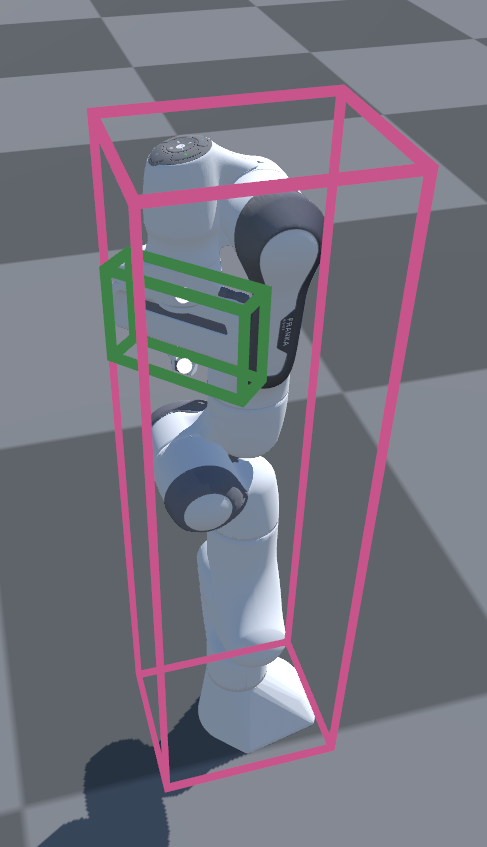
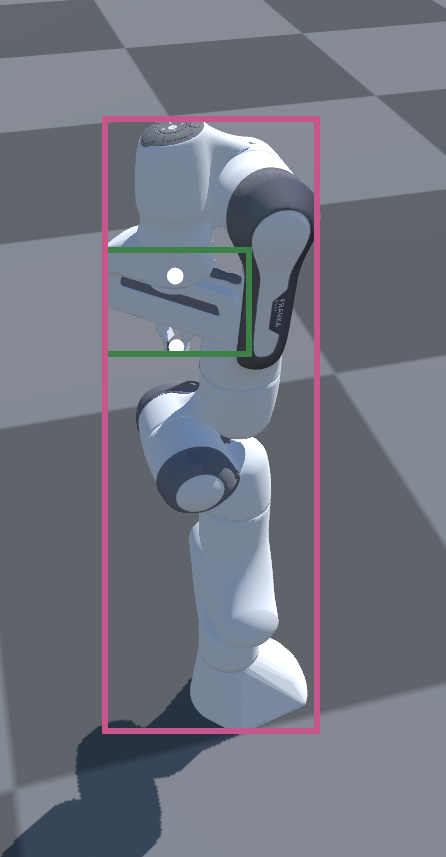
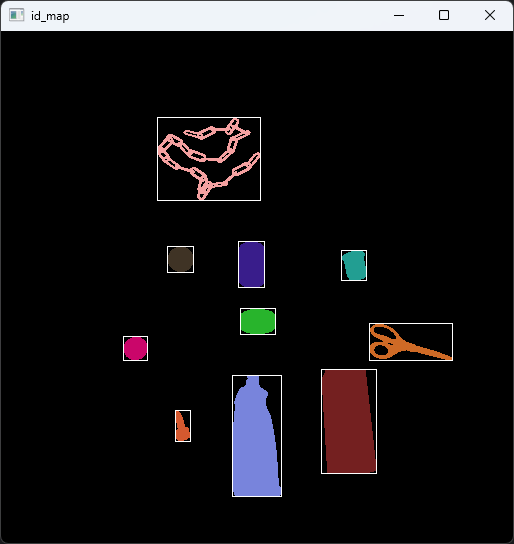
| [test_label](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_label.py) | Scene Labeling 2DBBOX |
|
| [test_cloth_attach](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_cloth_attach.py) | Cloth Simulation | |
| [test_humanbody_ik](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_humanbody_ik.py) | Human Body IK Interface | |
| [test_label](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_label.py) | Scene Labeling 2DBBOX | 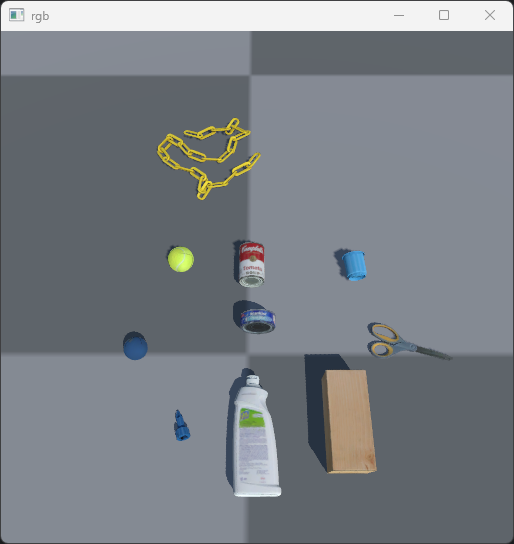
 |
| [test_ligth](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_light.py) | Lighting Parameter Settings | |
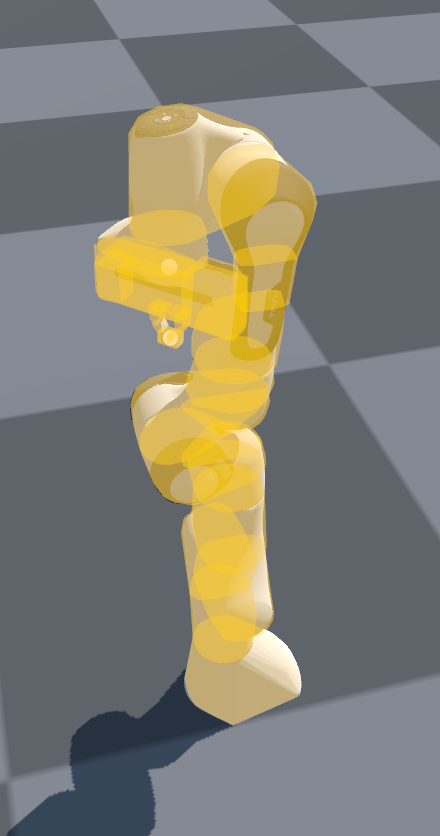
| [test_load_mesh](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_load_mesh.py) | Importing OBJ Model as Rigid Body | |
| [test_load_urdf](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_load_urdf.py) | Importing URDF File | |
| [test_object_data](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_object_data.py) | Object Basic Data | |
| [test_pick_and_place](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_pick_and_place.py) | Basic Interface and Grasping Driven by Native IK |
|
| [test_ligth](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_light.py) | Lighting Parameter Settings | |
| [test_load_mesh](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_load_mesh.py) | Importing OBJ Model as Rigid Body | |
| [test_load_urdf](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_load_urdf.py) | Importing URDF File | |
| [test_object_data](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_object_data.py) | Object Basic Data | |
| [test_pick_and_place](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_pick_and_place.py) | Basic Interface and Grasping Driven by Native IK |  |
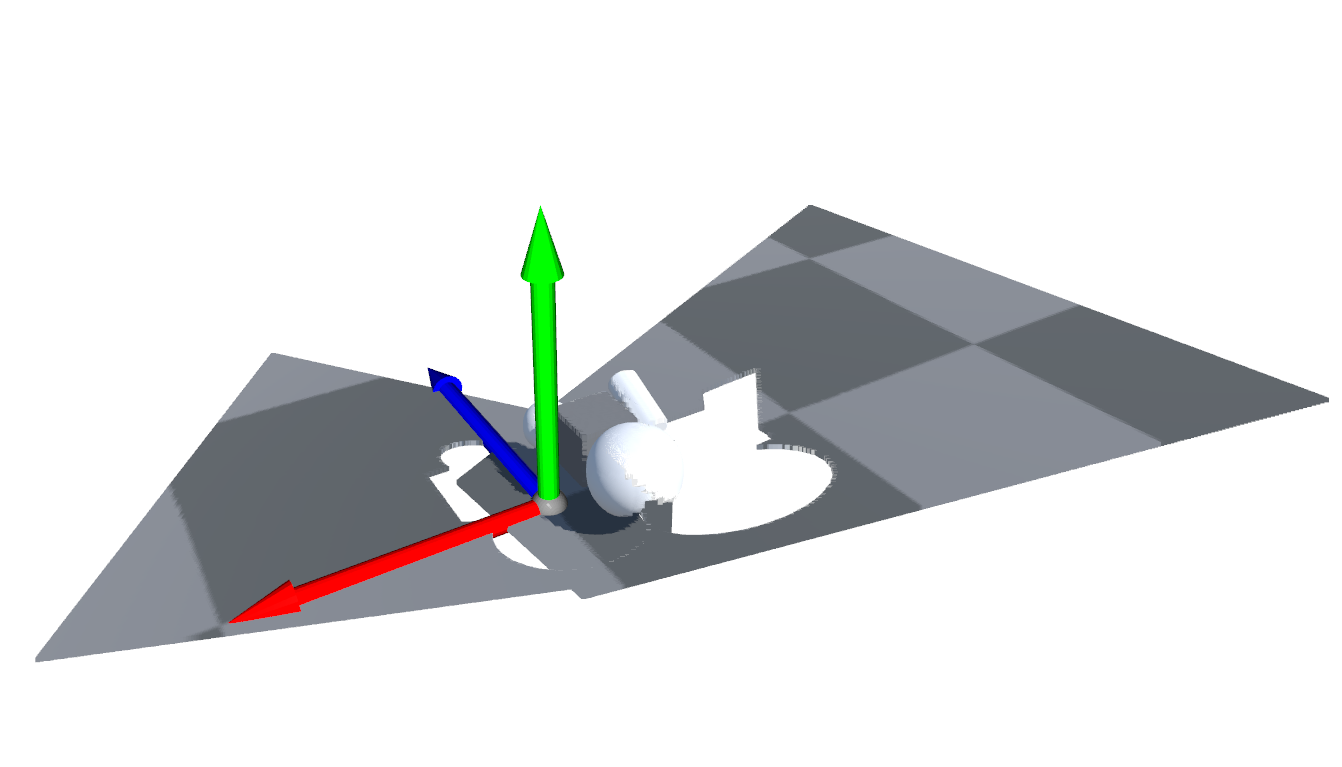
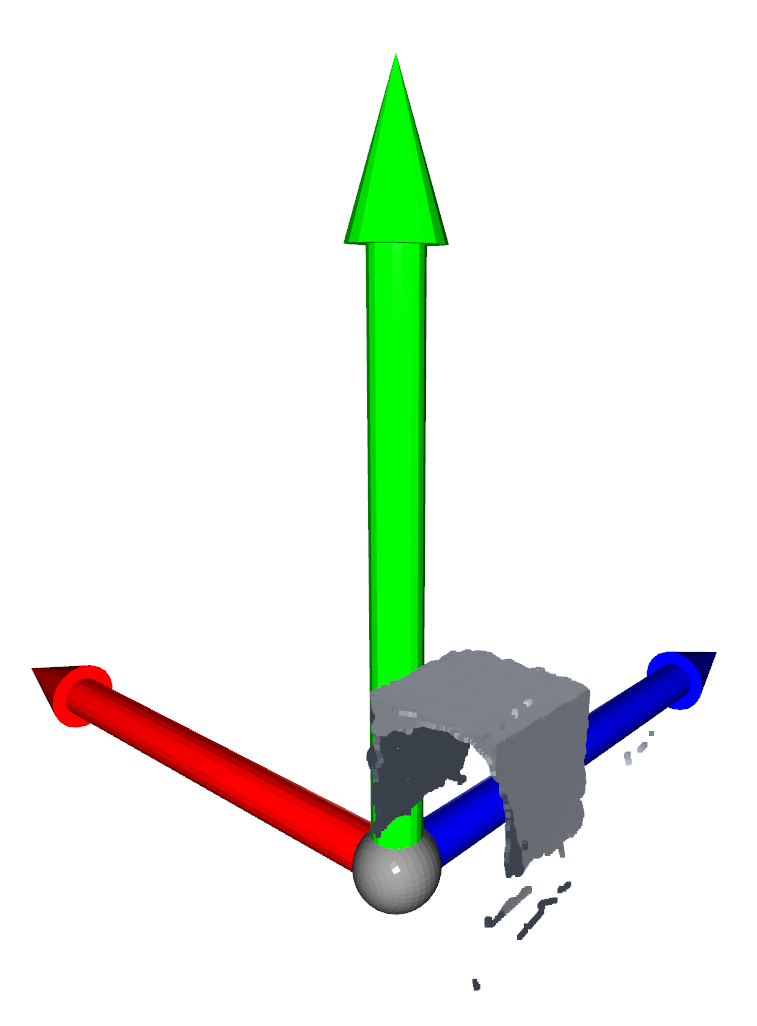
| [test_point_cloud](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_point_cloud.py) | Obtaining Depth Image and Converting to Point Cloud Using Image Width, Height, and FOV | |
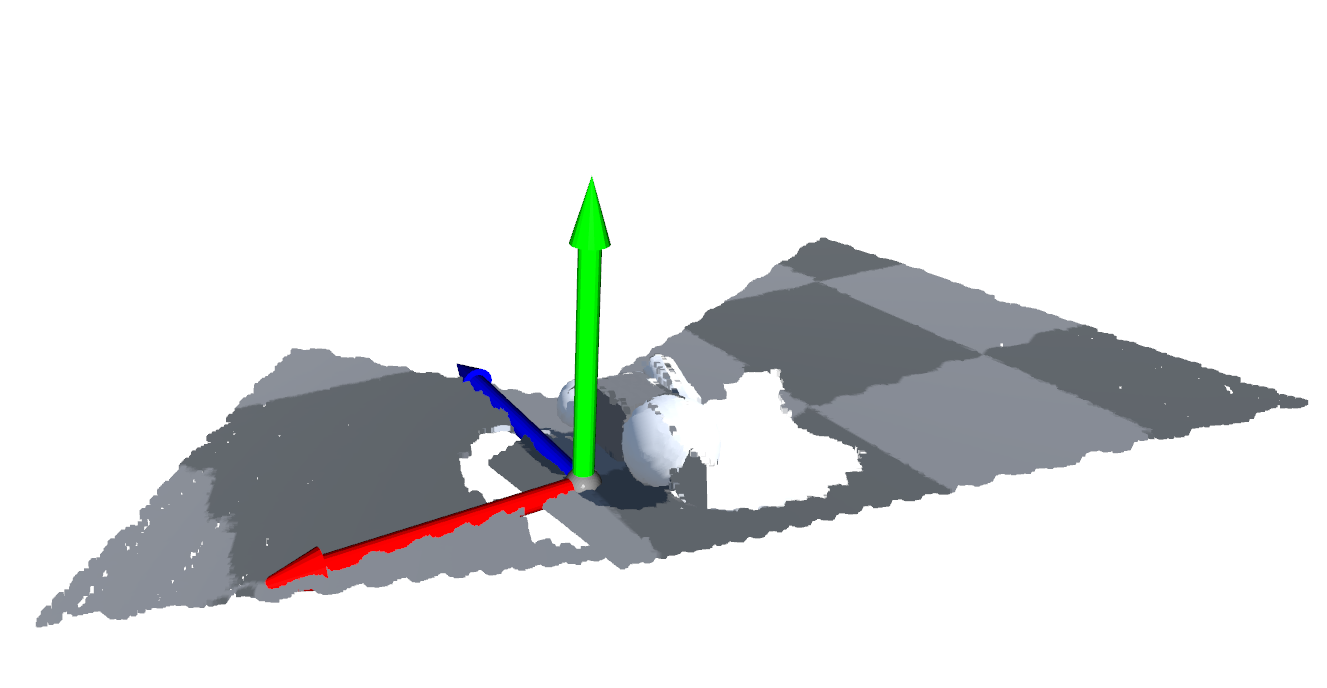
| [test_point_cloud_render](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_point_cloud_render.py) | Importing and Displaying .PLY Point Cloud File | |
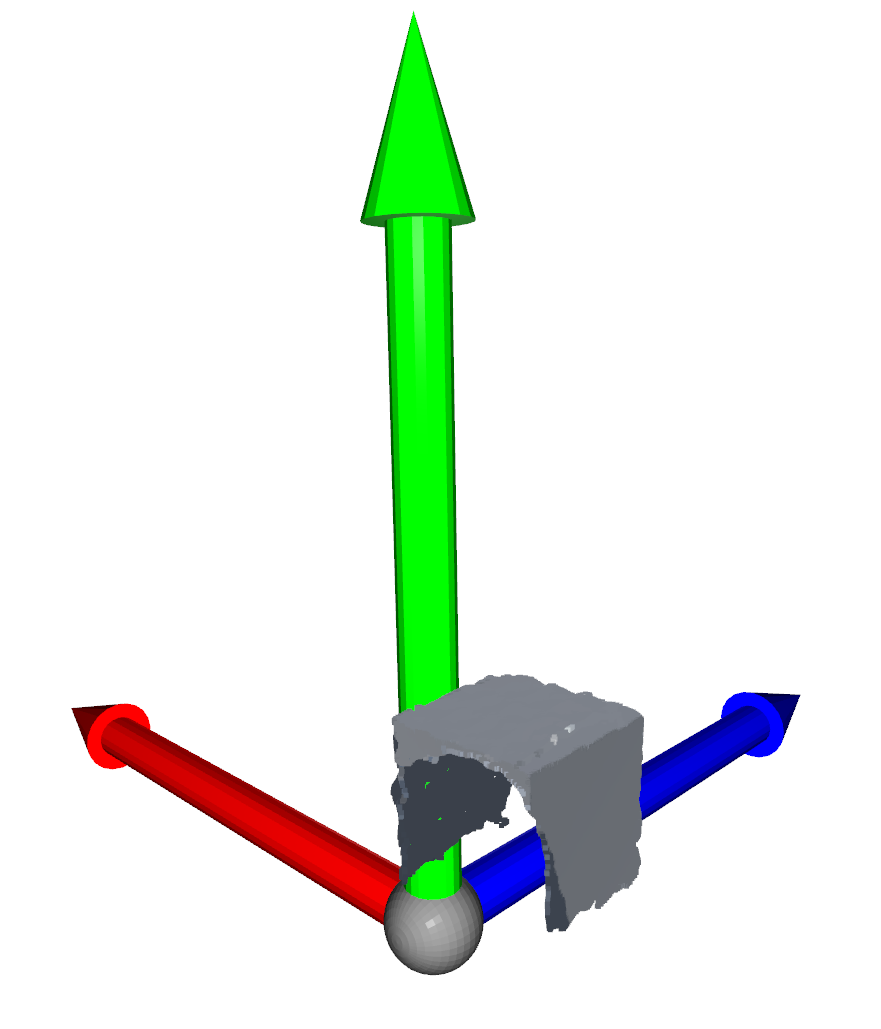
| [test_point_cloud_with_intrinsic_matrix](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_point_cloud_with_intrinsic_matrix.py) | Obtaining Depth Image and Converting to Point Cloud Using Camera Intrinsic Matrix | |
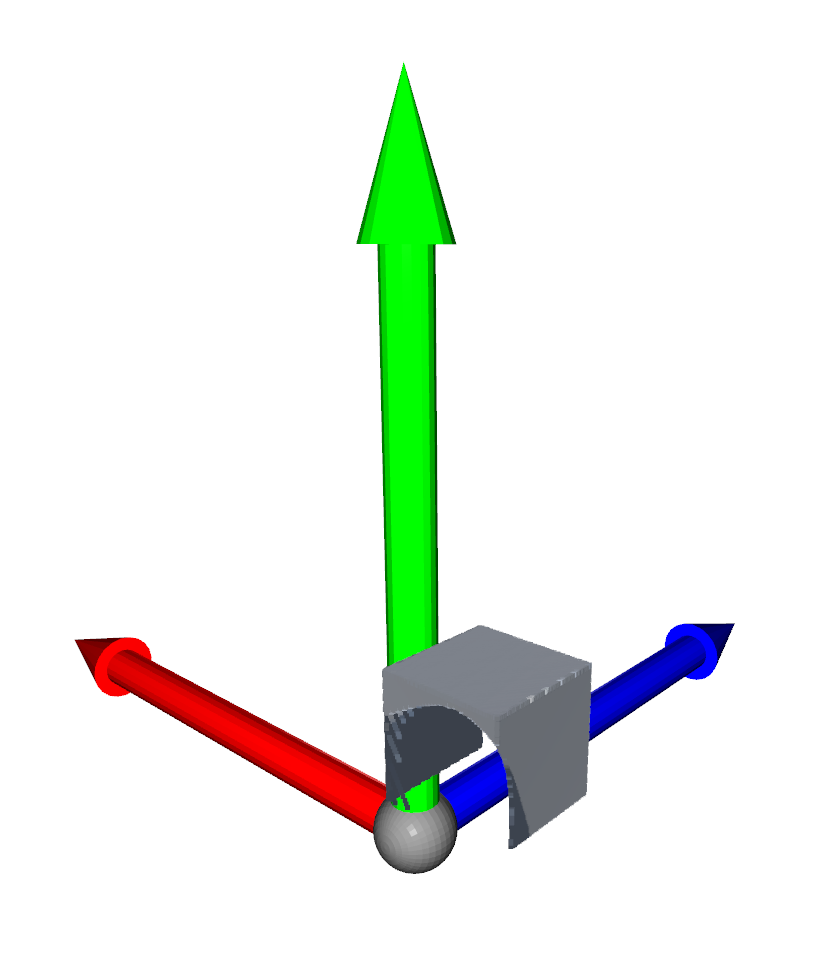
| [test_save_gripper](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_save_gripper.py) | Saving Gripper as OBJ Model | |
| [test_save_obj](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_save_obj.py) | Saving Multiple Objects in the Scene as OBJ Models | |
| [test_scene](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_scene.py) | Scene Building/Saving/Loading | |
| [test_tobor_move](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_tobor_move.py) | Tobor Wheel Drive Movement | |
| [test_urdf_parameter](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_urdf_parameter.py) | Joint Target Position Setting Panel |
|
| [test_point_cloud](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_point_cloud.py) | Obtaining Depth Image and Converting to Point Cloud Using Image Width, Height, and FOV | |
| [test_point_cloud_render](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_point_cloud_render.py) | Importing and Displaying .PLY Point Cloud File | |
| [test_point_cloud_with_intrinsic_matrix](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_point_cloud_with_intrinsic_matrix.py) | Obtaining Depth Image and Converting to Point Cloud Using Camera Intrinsic Matrix | |
| [test_save_gripper](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_save_gripper.py) | Saving Gripper as OBJ Model | |
| [test_save_obj](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_save_obj.py) | Saving Multiple Objects in the Scene as OBJ Models | |
| [test_scene](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_scene.py) | Scene Building/Saving/Loading | |
| [test_tobor_move](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_tobor_move.py) | Tobor Wheel Drive Movement | |
| [test_urdf_parameter](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_urdf_parameter.py) | Joint Target Position Setting Panel | 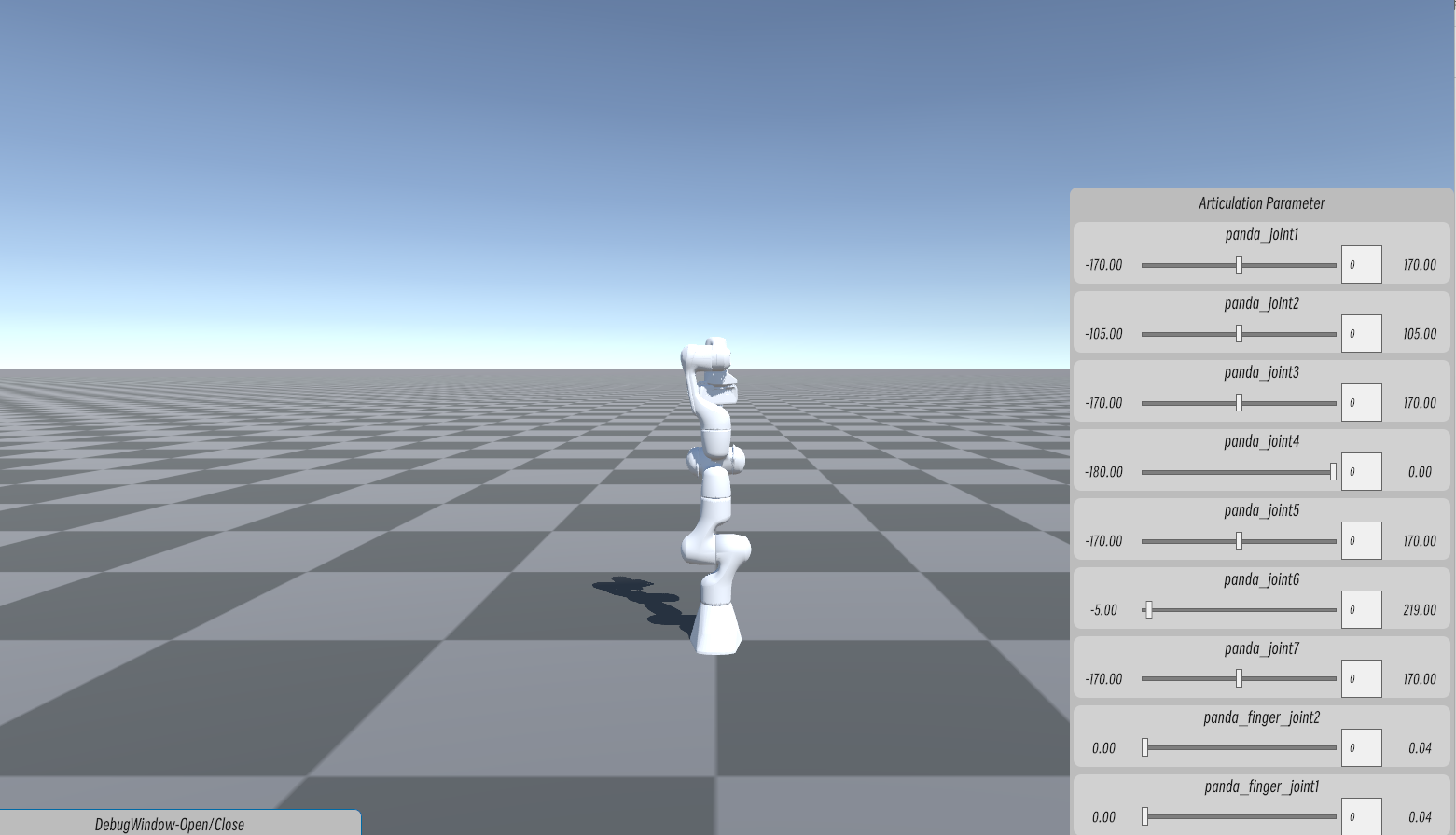 |
| [test_ompl](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_ompl.py) | Robotic Arm Obstacle Avoidance Planning
|
| [test_ompl](https://github.com/robotflow-initiative/pyrfuniverse/blob/main/test/pyrfuniverse_test/test/test_ompl.py) | Robotic Arm Obstacle Avoidance Planning |
---
## Enter Edit mode
Launch RFUniverse with the <-edit> parameter to enter Edit mode:
Linux:
```
RFUniverse.x86_64 -edit
```
Windows:
```
RFUniverse.exe -edit
```
|
---
## Enter Edit mode
Launch RFUniverse with the <-edit> parameter to enter Edit mode:
Linux:
```
RFUniverse.x86_64 -edit
```
Windows:
```
RFUniverse.exe -edit
```