# Leg 2dof v2
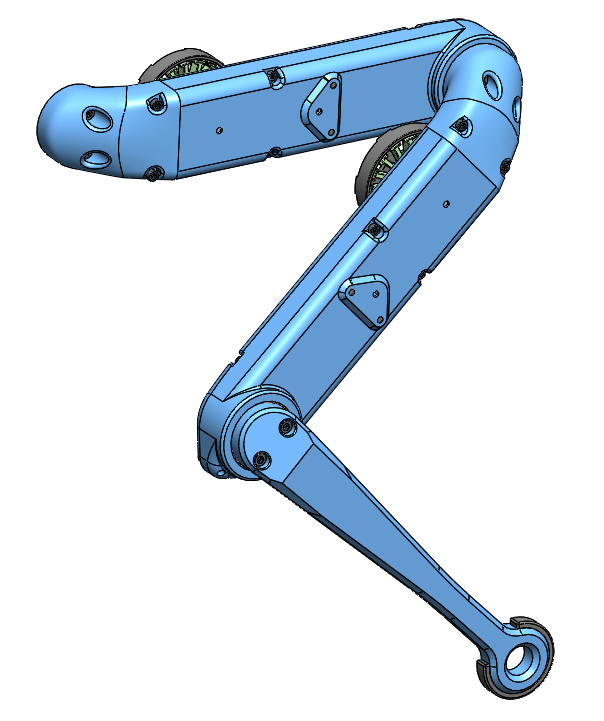
## Description
## 3d Printed Parts
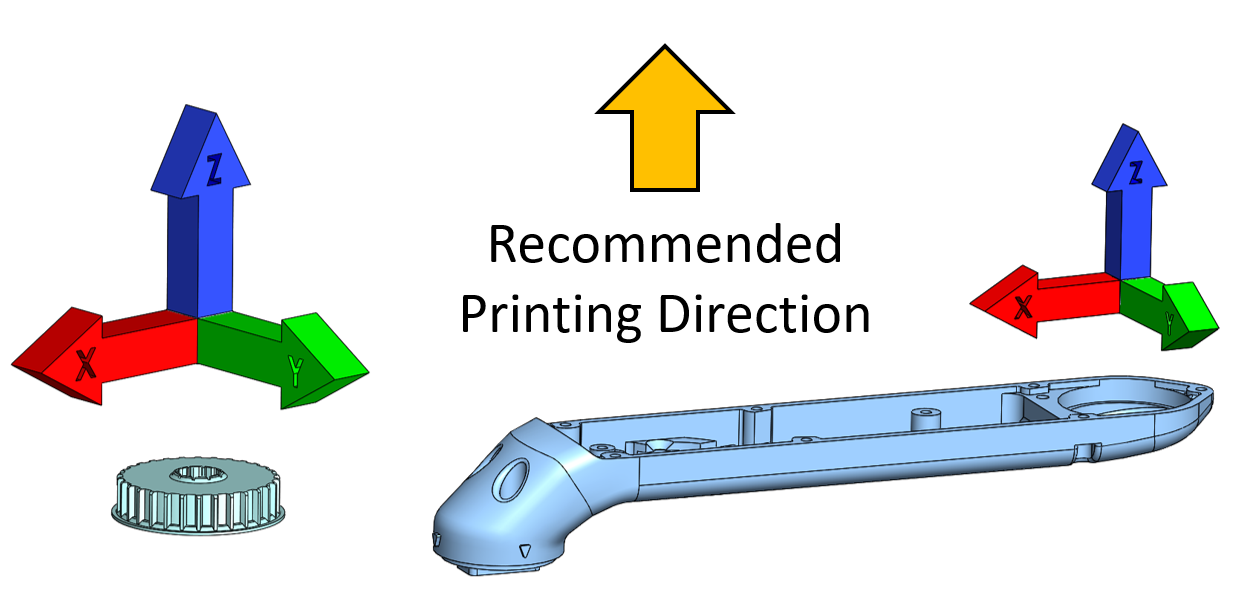
`The recommended printing direction for all the parts below is the positive z direction of the stl files.`
* All the STL files for 3d printing the leg structure can be found here: [STL Files Leg Structure](stl_files).
---
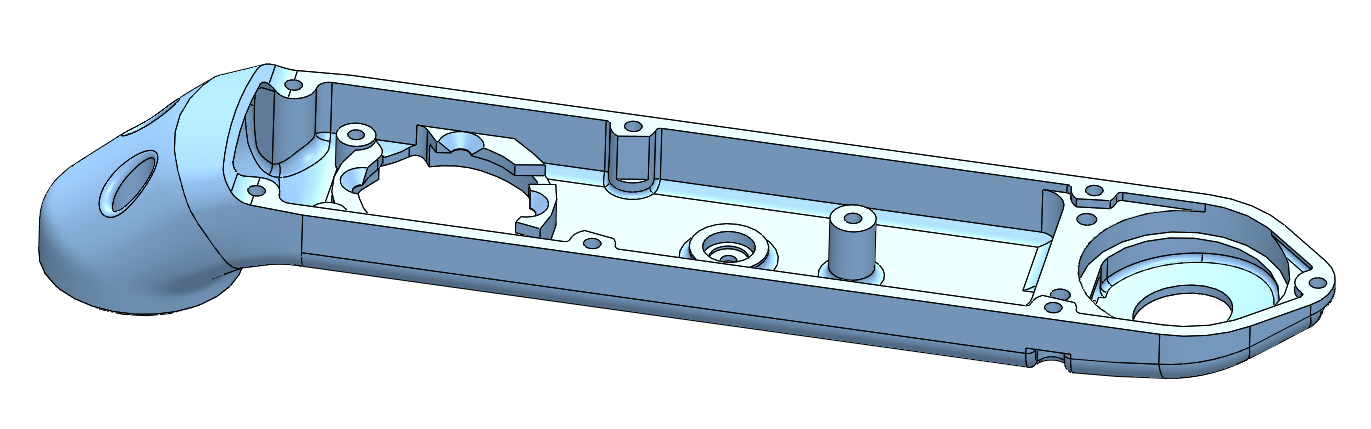
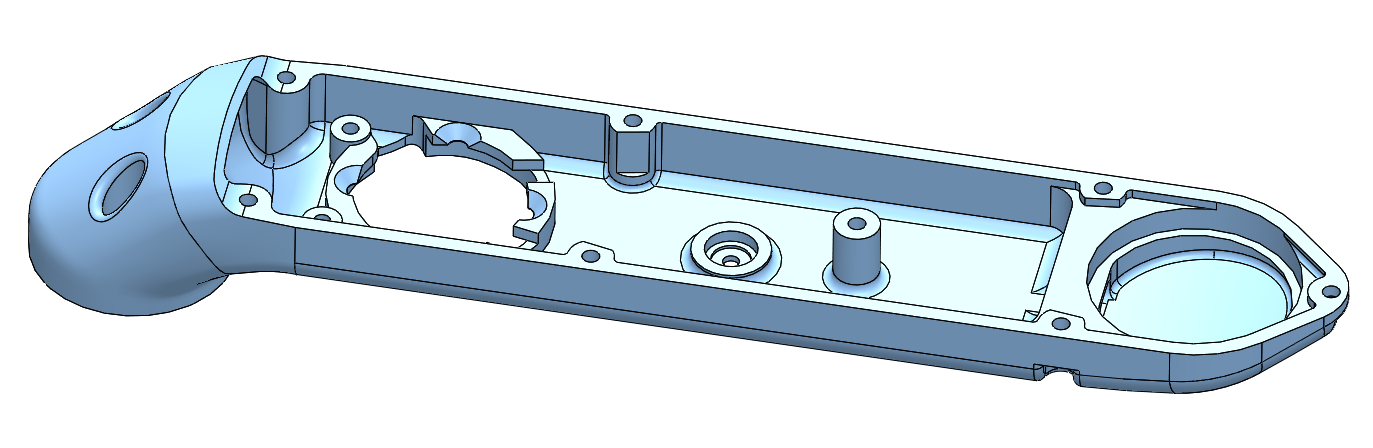
* [Hip Module Shell Base - STL file](stl_files/hip_module_shell_base.STL)
* weight: 27g
---
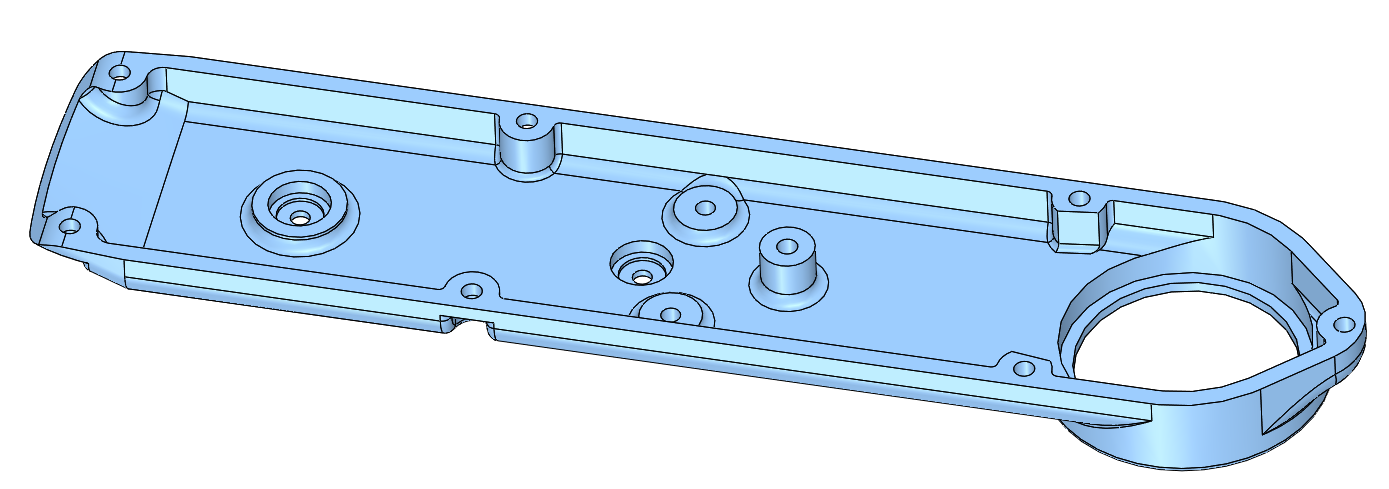
* [Hip Module Shell Cover - STL file](stl_files/hip_module_shell_cover.STL)
* weight: 15g
---
* [Upper Leg Module Shell Base - STL file](stl_files/upper_leg_module_shell_base.STL)
* weight: 27g
---
* [Upper Leg Module Shell Cover - STL file](stl_files/upper_leg_module_shell_cover.STL)
* weight: 15g
---
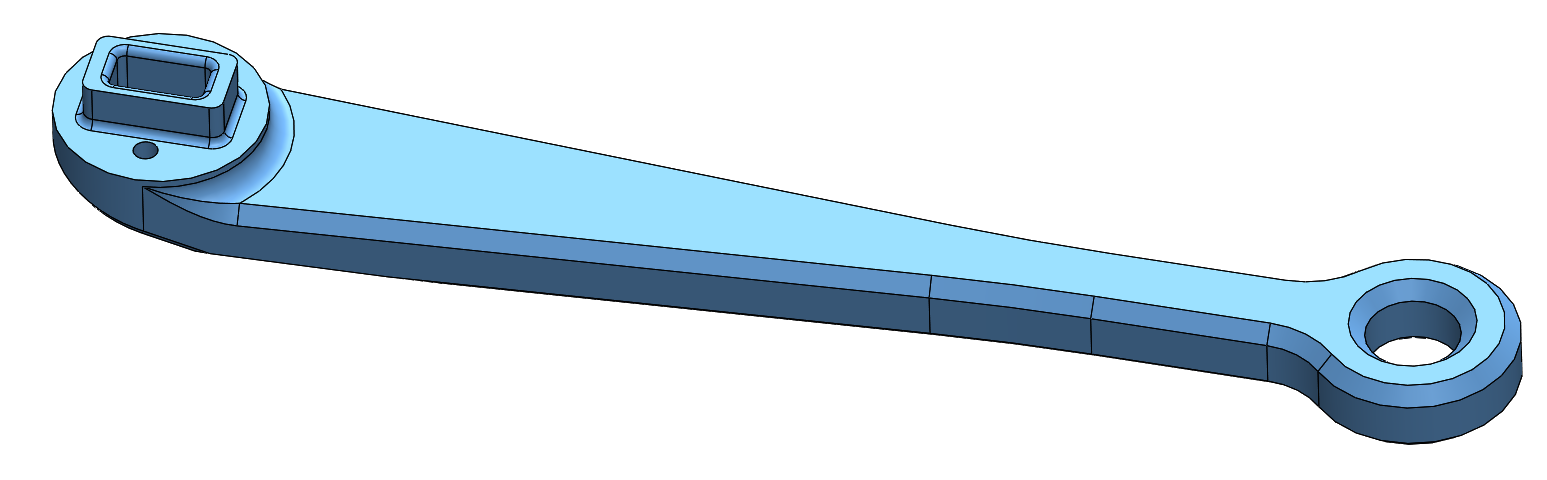
* [Lower Leg v2- STL file](stl_files/lower_leg_v2.STL)
* this lower leg is meant for printing with "sparse double dense" setting
* [Lower Leg Documentation](../general/lower_legs.md#lower-leg-v2)
* weight: 20g
---
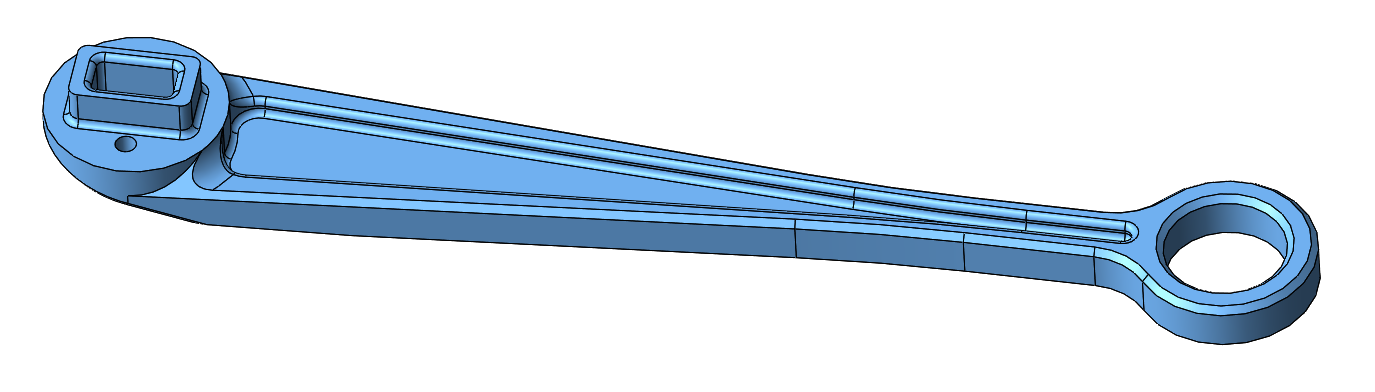
* [Lower Leg v3 - STL file](stl_files/lower_leg_v3.STL)
* this lower leg is meant for printing as a solid part
* [Lower Leg Documentation](../general/lower_legs.md#lower-leg-v3)
* weight: 20g
---
## More Information
[Open Dynamic Robot Initiative - Webpage](https://open-dynamic-robot-initiative.github.io)
[Open Dynamic Robot Initiative - YouTube Channel](https://www.youtube.com/channel/UCx32JW2oIrax47Gjq8zNI-w)
[Open Dynamic Robot Initiative - Forum](https://odri.discourse.group/categories)
[Open Dynamic Robot Initiative - Paper](https://arxiv.org/pdf/1910.00093.pdf)
[Hardware Overview](../../README.md#open-robot-actuator-hardware)
[Software Overview](https://github.com/open-dynamic-robot-initiative/open-dynamic-robot-initiative.github.io/wiki)
## Authors
Felix Grimminger
## License
BSD 3-Clause License
## Copyright
Copyright (c) 2019-2021, Max Planck Gesellschaft and New York University