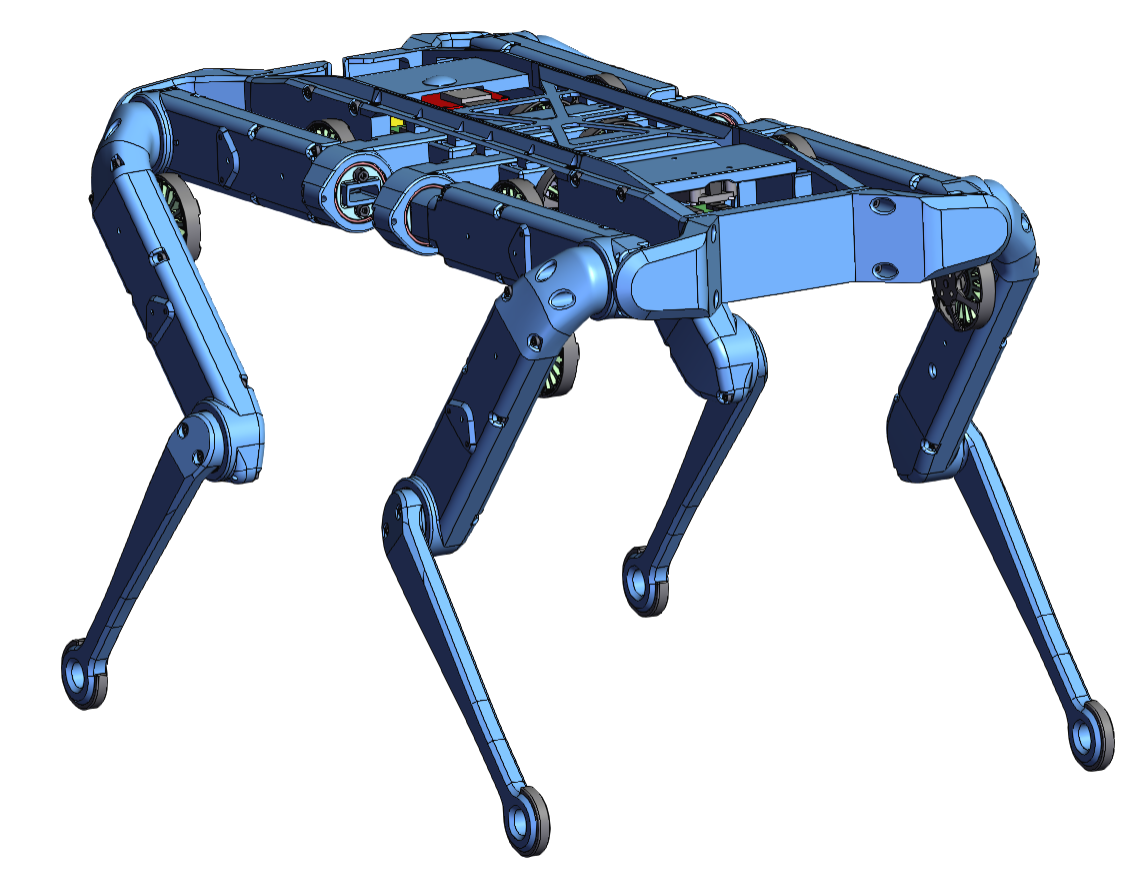
# Quadruped Robot 12dof v1
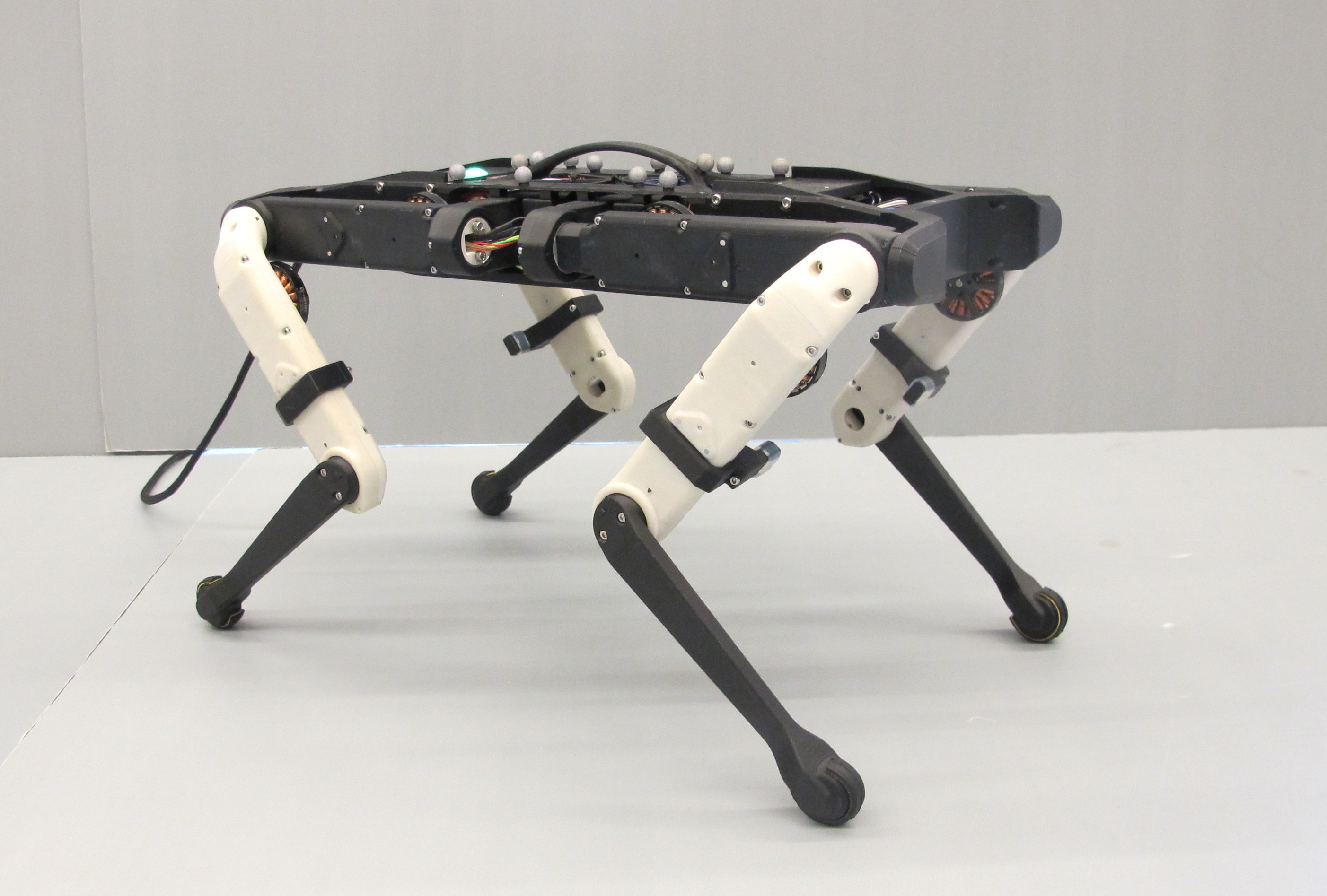
*12dof Quadruped Robot - weight: 2,5kg*
## Commercial Option

*Solo12 Quadruped Robot. Picture source: PAL Robotics*
The Solo12 robot is now commercially available from PAL Robotics.
You can purchase the fully assembled robot or you can order a kit with all the components that are required and assemble the robot yourself.
* [PAL Robotics - Solo12 Product Page](https://solo.pal-robotics.com/solo)
Both options include the [inertia measurement unit](#inertia-measurement-unit), the [calibration tools](../general/robot_calibration.md#calibration-tool-quadruped-12dof) and the three different [center plate options](#body-module).
The [Micro Driver Board Programmer](../../electronics/micro_driver_electronics/README.md#flash-adapter-and-flash-wire) and the [Master Board Programmer](https://github.com/open-dynamic-robot-initiative/master-board/blob/master/firmware/README.md#flashing-the-firmware) are included as well.
All the information on how to order the components and build the robot yourself can be found below.
## Description
* this page describes all the components that are required to build the Quadruped Robot with 12 active degrees of freedom
* the robot consists of a body module and 4 identical 3dof legs
* the 3dof legs are described on a separate page: [Leg 3dof v1](../leg_3dof_v1/README.md#leg-3dof-v1)
* the robot has a connection wire for power supply and ethernet communication
* we are working on a new version with onboard batteries and wireless communication: [Quadruped Robot v1.1 - Autonomy Upgrade](../quadruped_robot_12dof_v1.1/README.md#quadruped-robot-12dof-v11)

*Quadruped Robot 12dof*
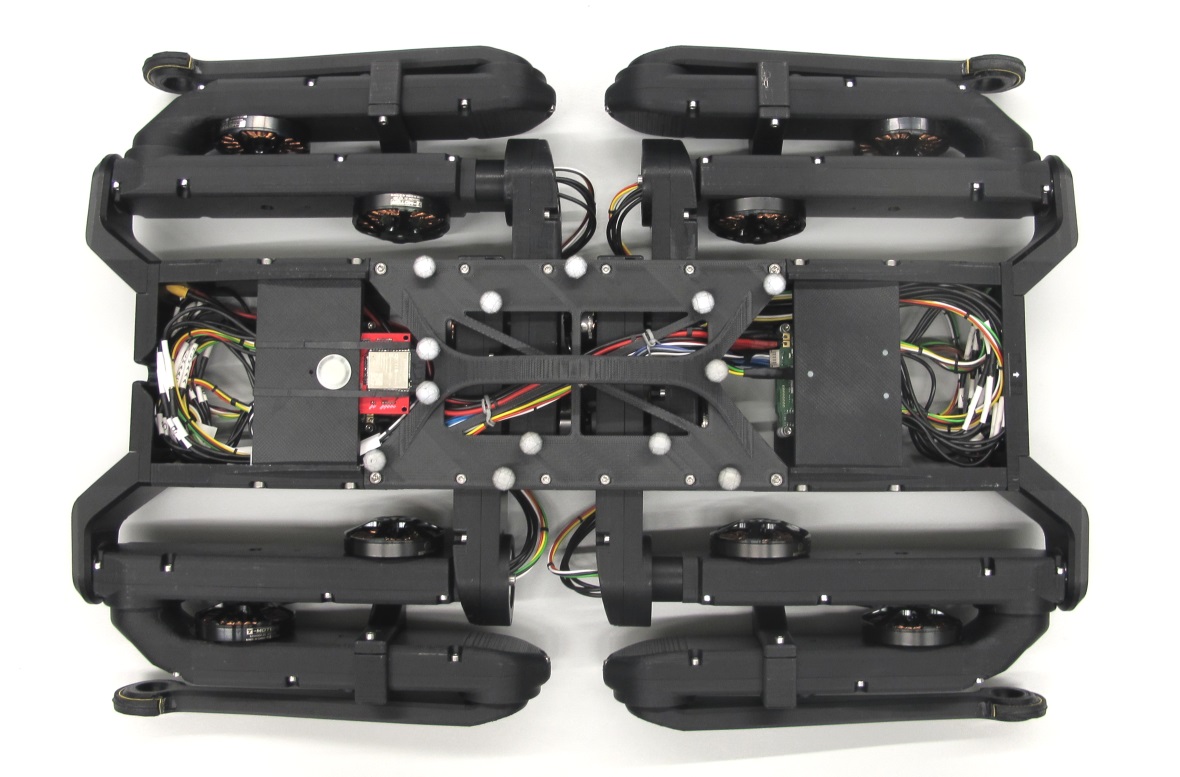
*Quadruped Robot 12dof - Top View*
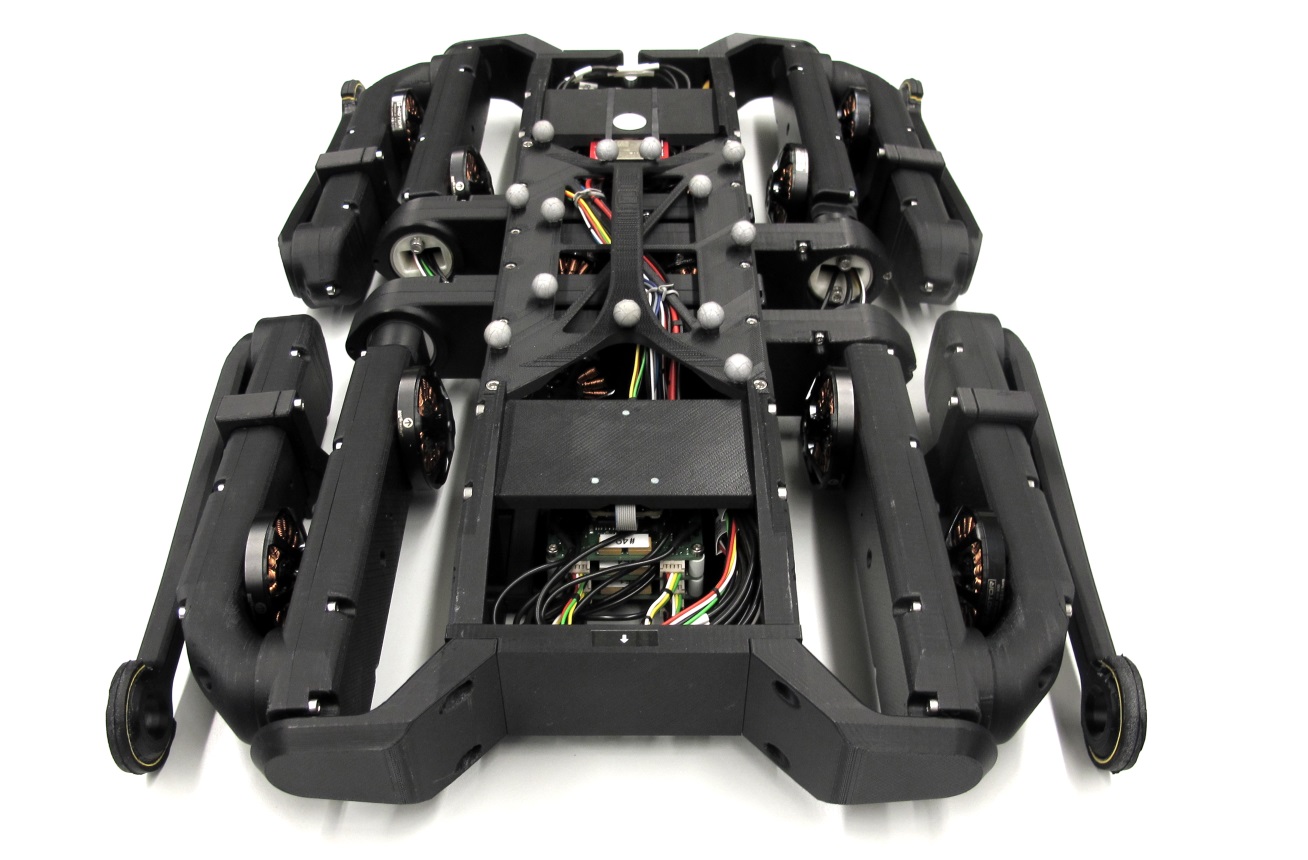
*Quadruped Robot 12dof - Front View*

*Quadruped Robot 12dof - legs folded for transport*
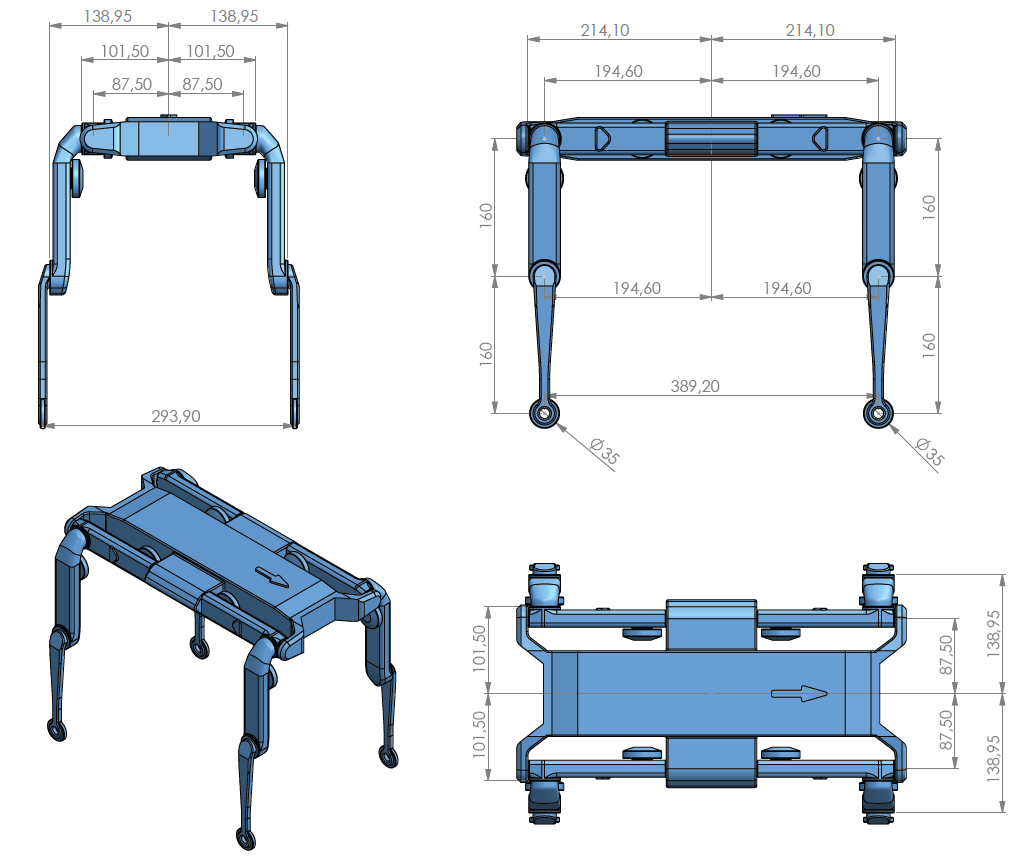
## Dimensions
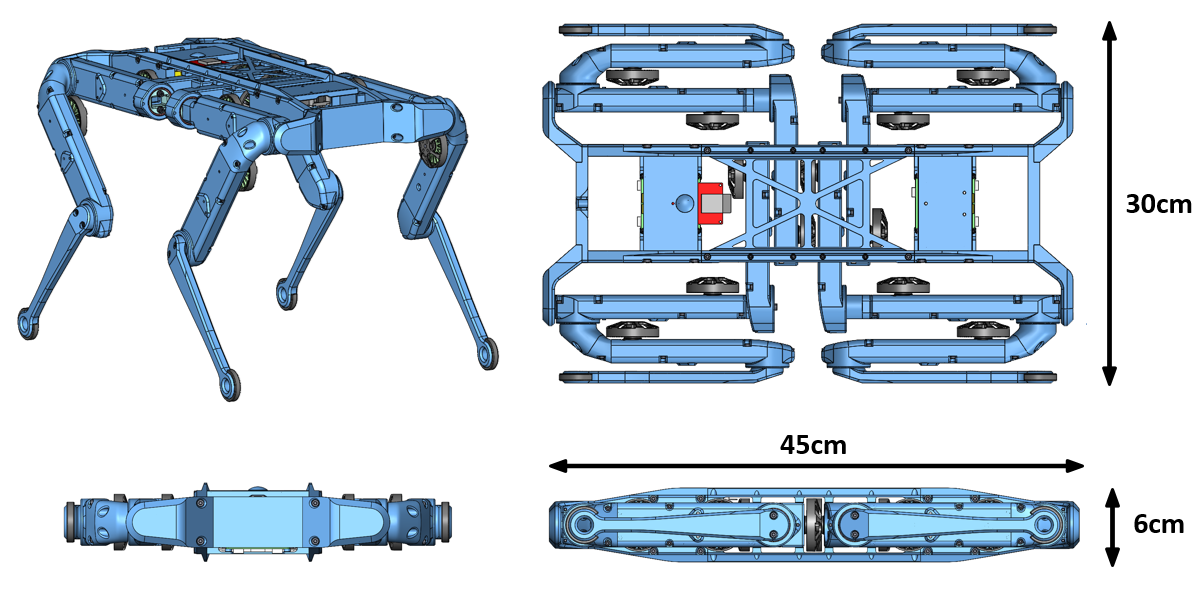
*Quadruped Robot Dimensions: 45cm x 30cm x 6cm*

*Quadruped Robot Hip Height*
## Range of Motion
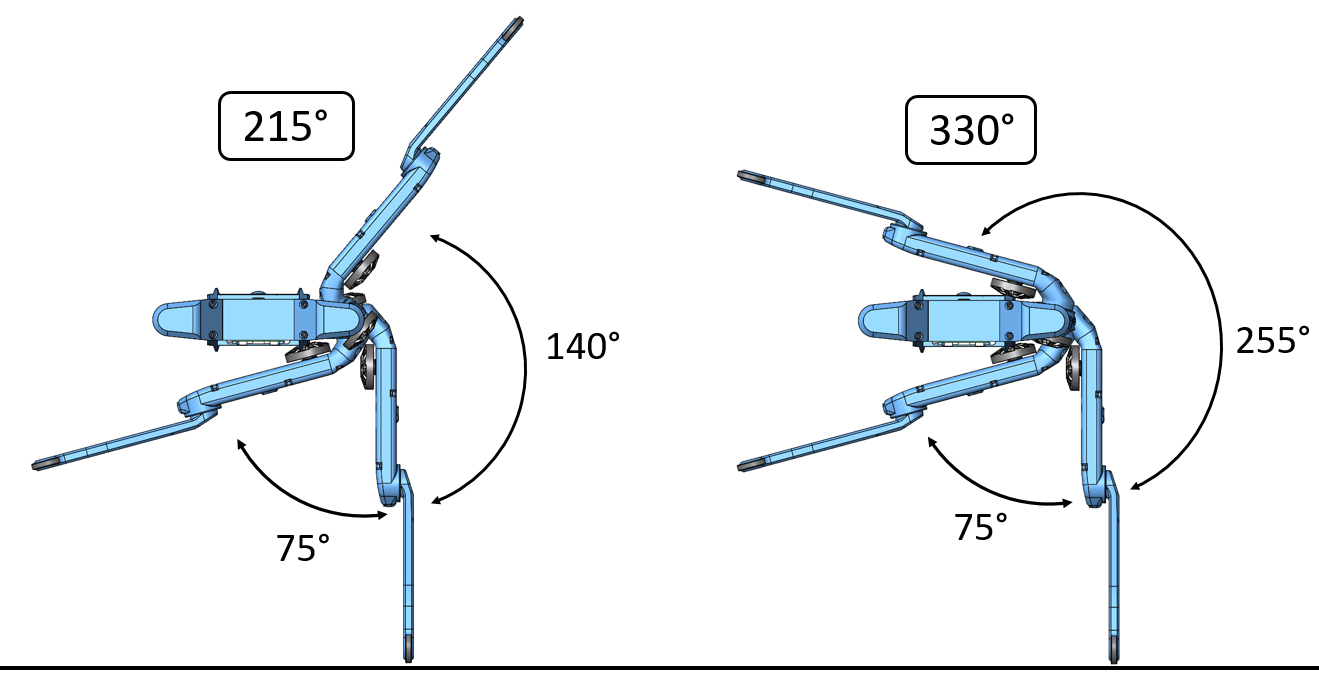
* the standard Hip AA range of motion is 215 degrees
* the effective Hip AA range of motion can be extended to 325 degrees if the Hip FE joint is moved simultaneously
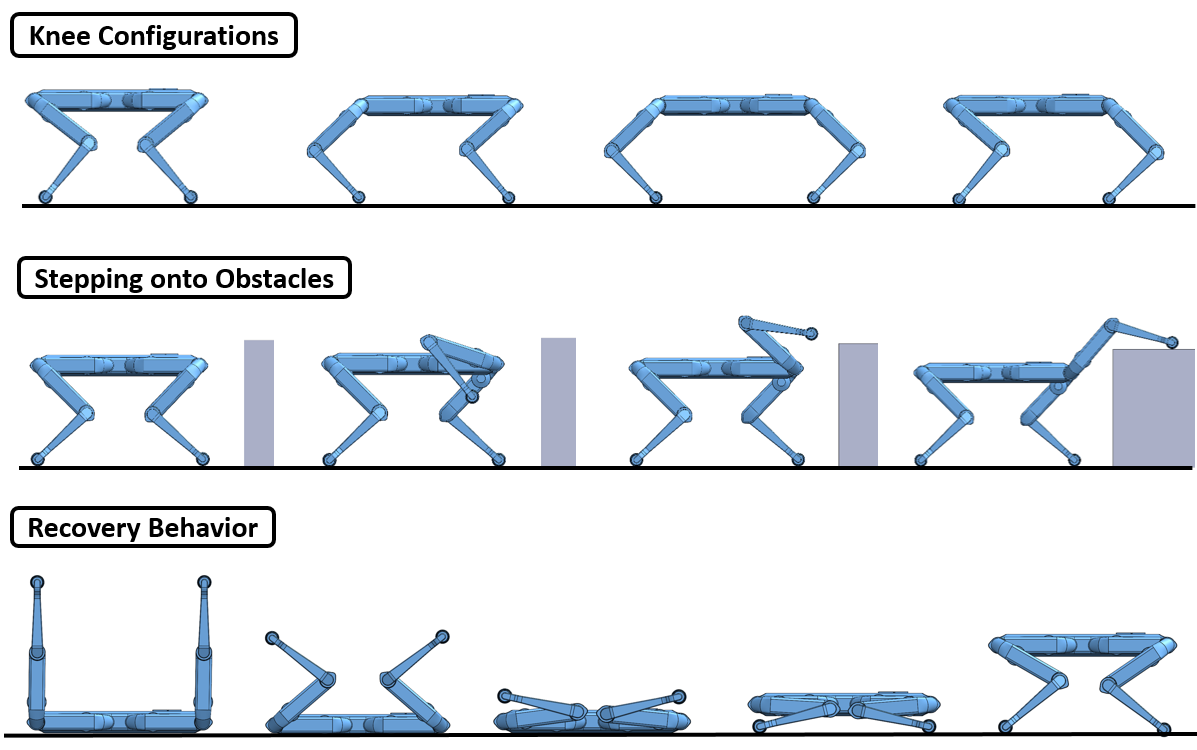
* the Knee and Hip FE degrees of freedom can perform multiple rotations
* this enables the robot to step onto obstacles or to recover from a fall
* the wires that are routed through the Hip FE joint limit the number of rotations that can be performed
## Leg Modules

*3dof Leg Modules - weight: 485g each*
* [Leg 3dof v1 Documentation](../leg_3dof_v1/README.md#leg-3dof-v1)
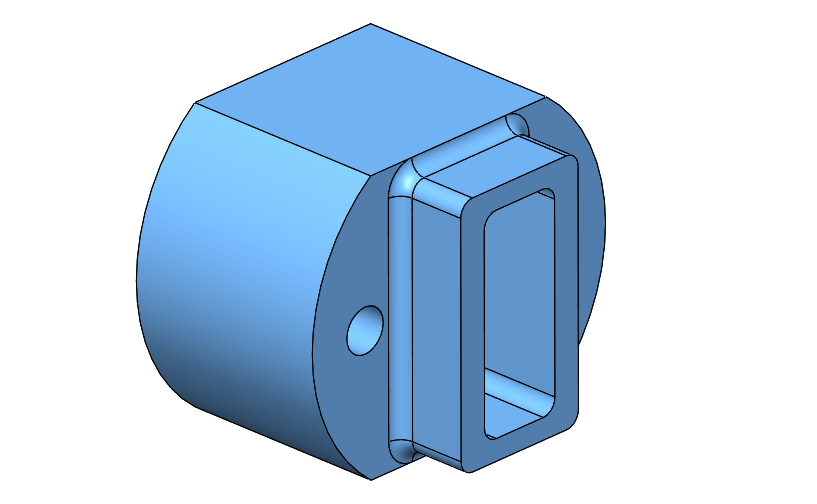
## Hip Adapters

*The hip adapters are installed on the front right and the hind left leg.*
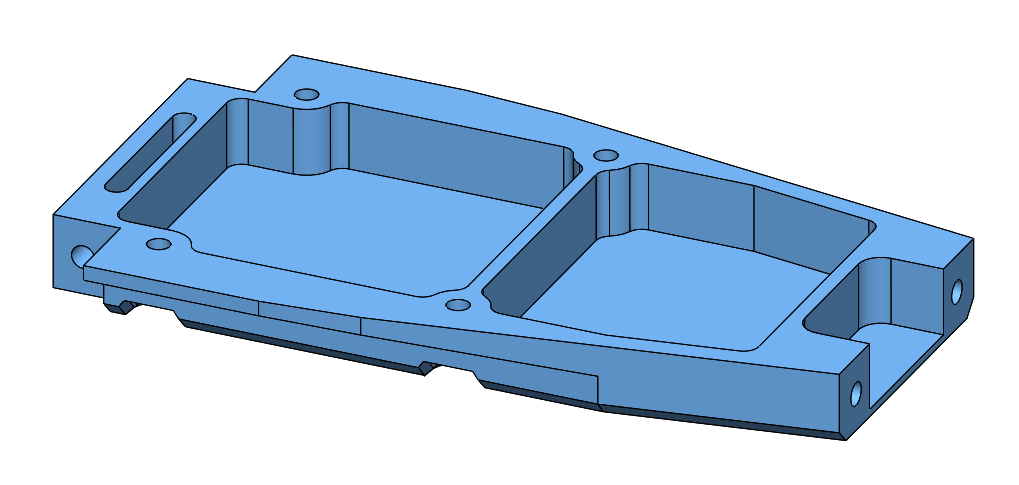
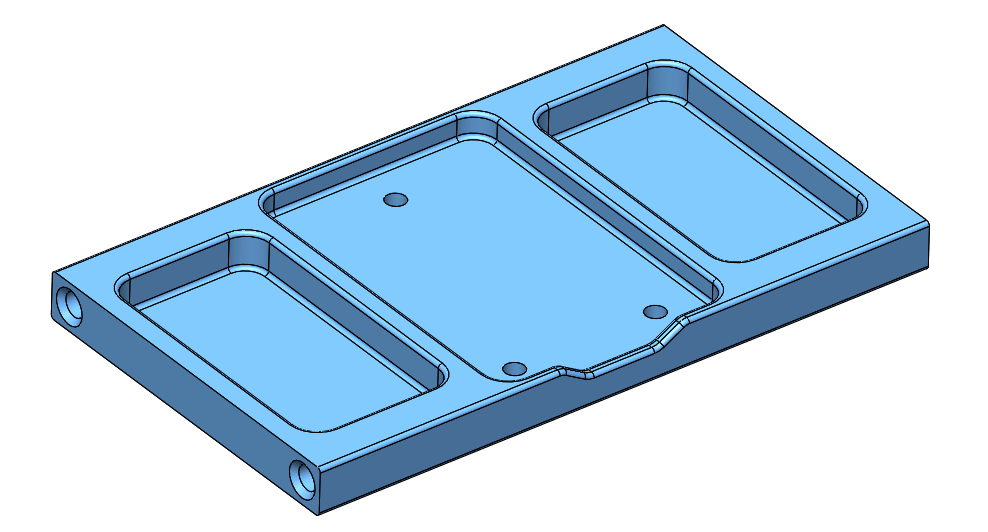
## Body Module

*Body Structure - weight: 300g*

*Body Structure Center Plates - 3 different versions are available.*
## Electronics

*Electronic Component Overview*

*Electronic Components Quadruped Robot*
### Master Board

*Master Board v2 - weight: 19g each*
* Custom electronics board: [Master Board Documentation](https://github.com/open-dynamic-robot-initiative/master-board#master-board)
* [Master Board Wiring Documentation](details/details_electronics_quadruped_12dof.md#master-board)
### Micro Driver Boards

*Micro Driver Stacks for Quadruped Robot - weight: 94g*
* Custom electronics board: [Micro Driver Board Documentation](../../electronics/micro_driver_electronics/README.md)
* [Micro Driver Wiring Documentation](details/details_electronics_quadruped_12dof.md#micro-driver-stack-front)
### Inertia Measurement Unit

*Inertia Measurement Unit - weight: 13g*
* Lord Microstrain 3DM-CX5-25
* [3DM-CX5-25 Product Page](https://www.microstrain.com/inertial/3dm-cx5-25)
* We use the imu with an extended measurement range
* Gyro Rate: +/- 900 deg/sec.
* Accelerometer range: +/- 20G
* If you want to use a different IMU, you might want to have a look at [this post in the ODRI Forum](https://odri.discourse.group/t/using-imu-lord-microstrain-3dm-gx4-45/202/4?u=ferdinand-wood)
* [IMU Wiring Documentation](details/details_electronics_quadruped_12dof.md#inertia-measurement-unit)
* Ordering information [below](#bill-of-materials---quadruped-robot-12dof)
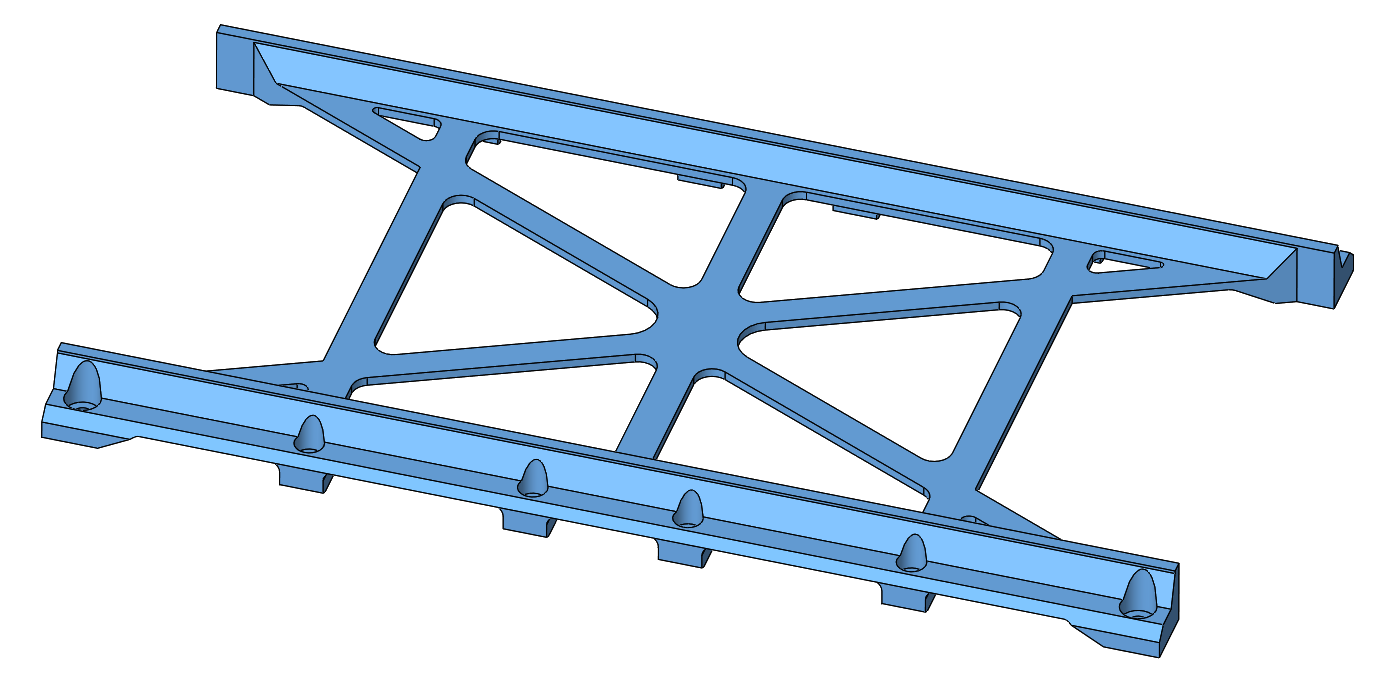
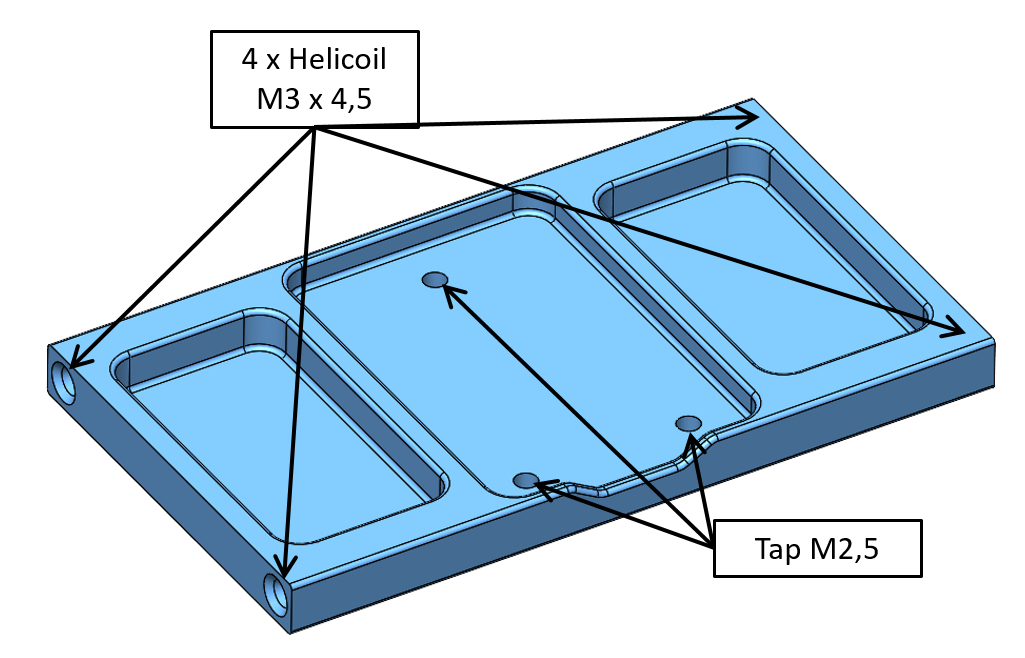
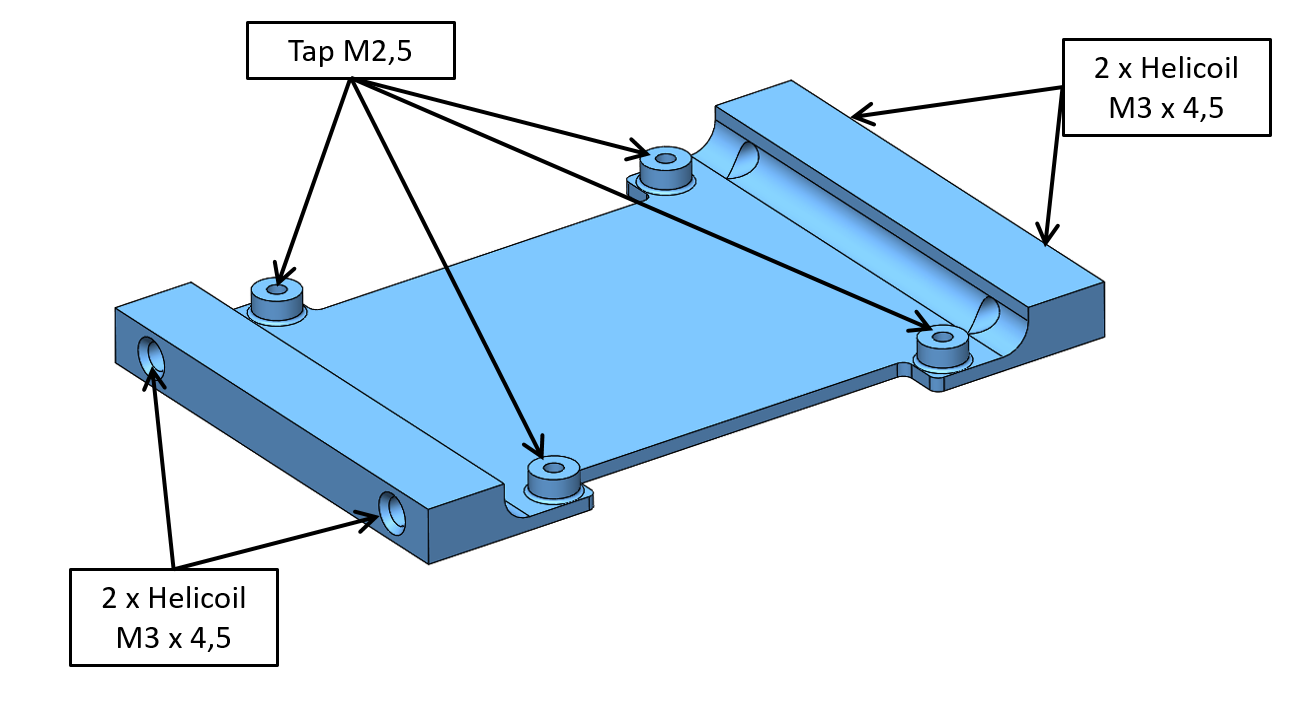
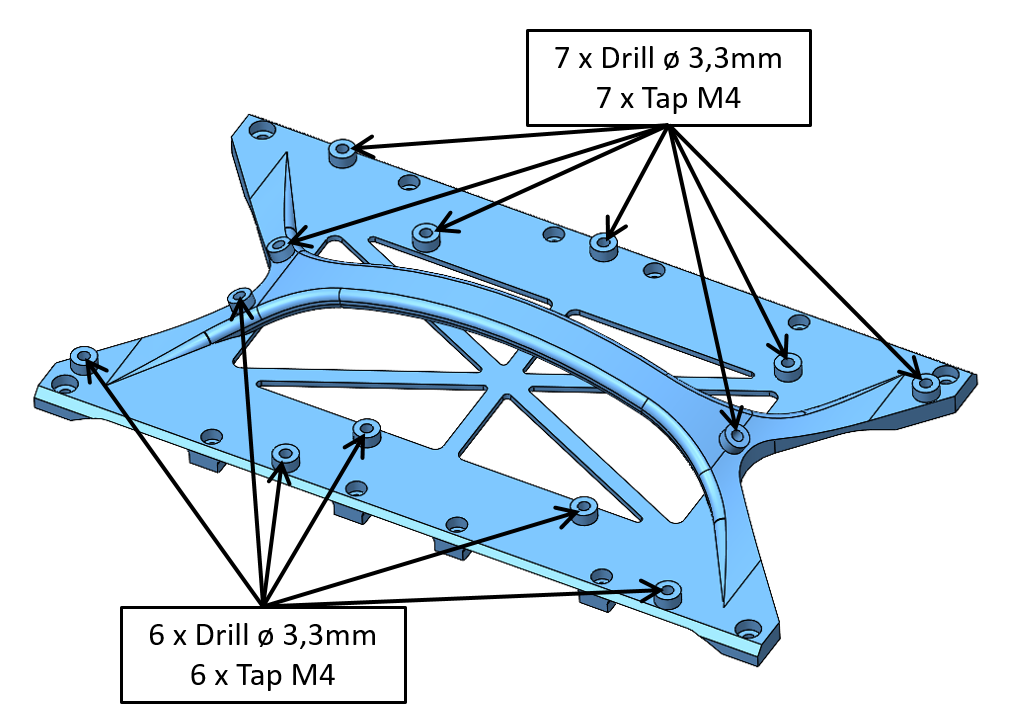
## 3D Printed Parts

*3D Printed Body Structure Components - weight: 270g*
* All the STL files for 3d printing the body structure can be found here: [STL Files Body Structure](stl_files).
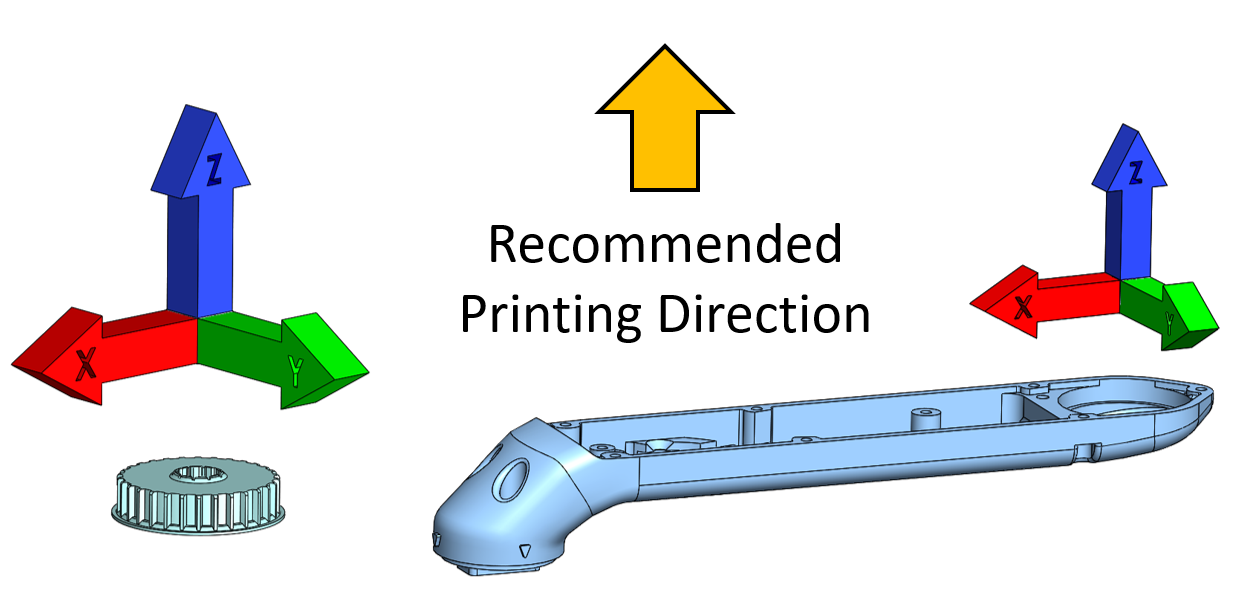
`The recommended printing direction for all the parts below is the positive z direction of the stl files.`
---

* [Body Structure Back - STL file](stl_files/body_structure_back.STL)
* weight: 12g
---

* [Body Structure Bottom Rev A - STL file](stl_files/body_structure_bottom_rev_a.STL)
* for Micro Driver boards with 90 degree Hirose encoder connectors
* weight: 10g
---
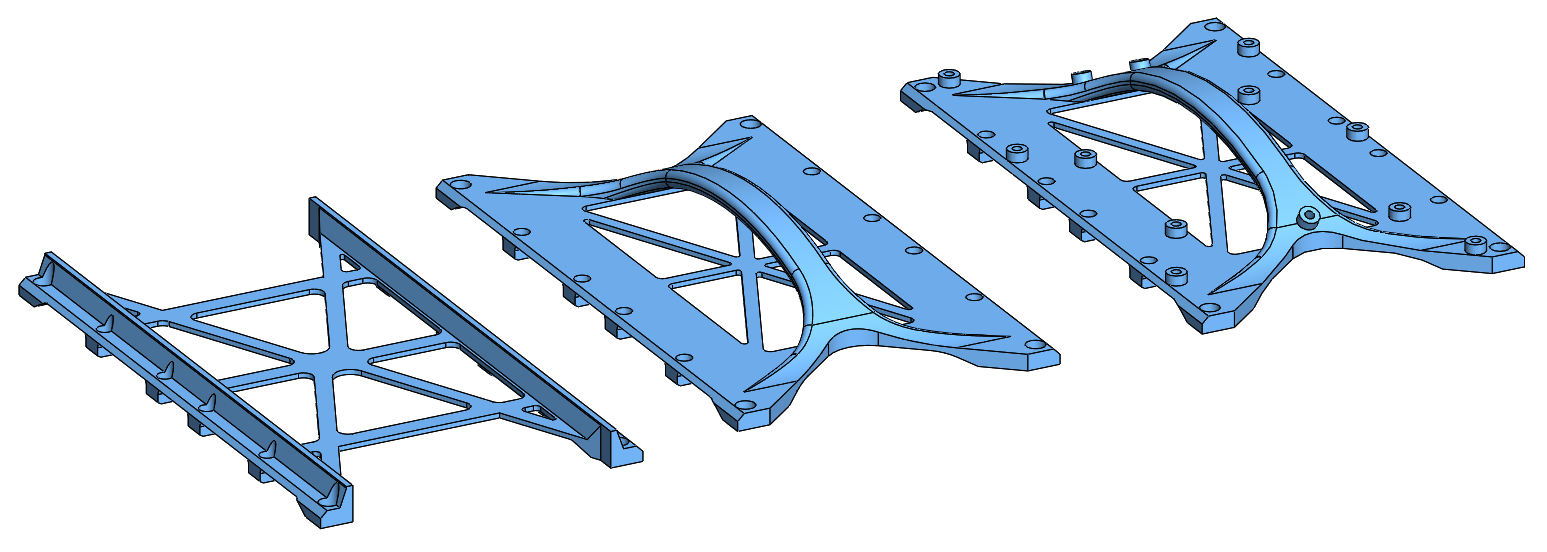
*There are 3 different versions for the body structure center top plate.
Minimal, with handle and with handle and Vicon marker attachments.*
---
* [Body Structure Center - STL file](stl_files/body_structure_center.STL)
* this part can be used on the bottom and the top of the robot
* weight: 24g
---

* [Body Structure Center Handle- STL file](stl_files/body_structure_center_handle.STL)
* weight: 29g
---

* [Body Structure Center Vicon- STL file](stl_files/body_structure_center_vicon.STL)
* weight: 30g
---

* [Body Structure Front - STL file](stl_files/body_structure_front.STL)
* weight: 12g
---

* [Body Structure Hip AA Support Rev A - STL file](stl_files/body_structure_hip_aa_support_rev_a.STL)
* weight: 20g
---
* [Body Structure Side - STL file](stl_files/body_structure_side.STL)
* weight: 18g
---
* [Body Structure Top IMU - STL file](stl_files/body_structure_top_imu.STL)
* weight: 12g
---

* [Body Structure Top Master Board - STL file](stl_files/body_structure_top_master_board.STL)
* weight: 11g
---

* [Led cover - STL file](stl_files/led_cover.STL)
* weight: 0,4g
* Print with transparent or translucent material
---
* [Hip Adapter - STL file](stl_files/hip_adapter.STL)
* weight: 5g
---
* [Micro Driver Stack Spacer - STL file](stl_files/spacer_micro_driver_stack.STL)
* weight: 0,1g
---
## Off-the-shelf Components
### Hip AA Bearing

*Hip AA bearings - weight: 3,4g each*
* Stainless steel bearings for Hip AA dof
* Dimensions: 25mm x 20mm x 4mm
* Ordering information [below](#bill-of-materials---quadruped-robot-12dof)
### Fasteners

* stainless steel fasteners
* Ordering information [below](#bill-of-materials---quadruped-robot-12dof)
* Plastic M2,5 fasteners for the IMU
* Ordering information [below](#bill-of-materials---quadruped-robot-12dof)
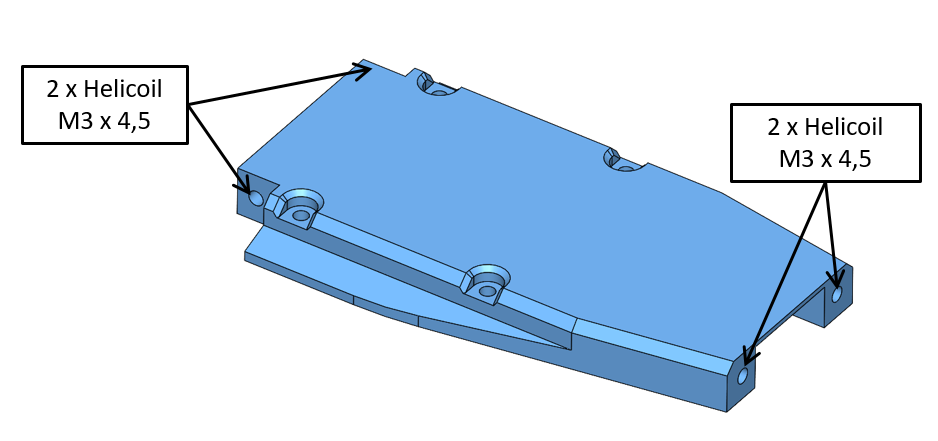
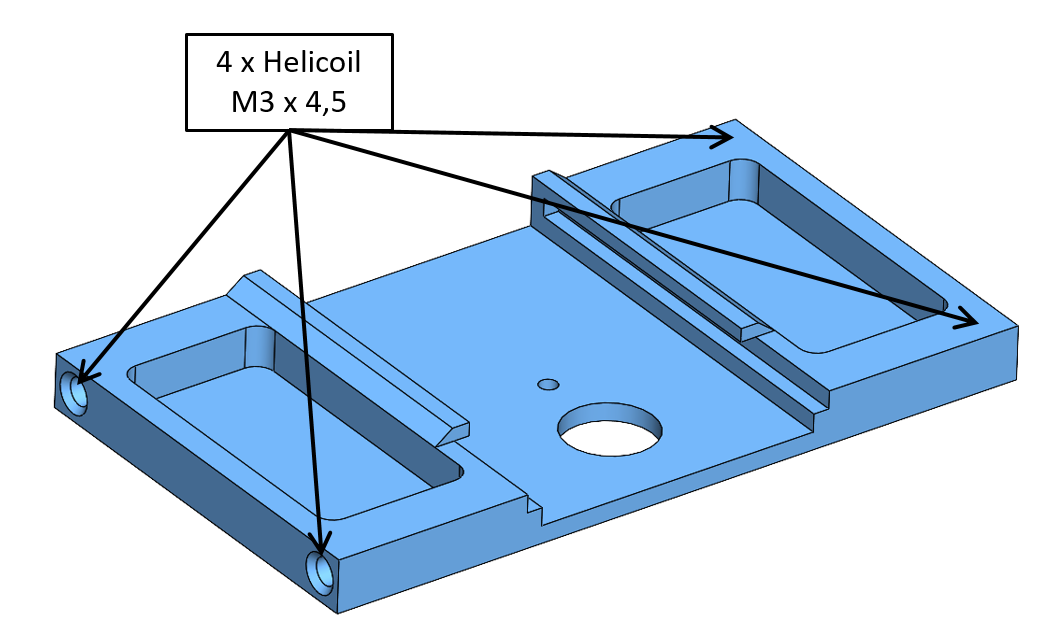
### Helicoil Thread Inserts

* M3 x 4,5 Helicoil thread inserts
* Ordering information [below](#bill-of-materials---quadruped-robot-12dof)
### Vicon Markers

*Reflective Markers for motion capture system - weight: 1g each*
* 9.5mm Vicon Markers
* M4 x 10 set screws for attachment
* Ordering information [below](#bill-of-materials---quadruped-robot-12dof)
## Bill of Materials - Quadruped Robot 12dof
 | Part Name | Quantity | Ordering Information | Comments |
| --- | --- | --- | --- |
|3DOF Leg |4|[3DOF Leg Documentation](../leg_3dof_v1/README.md#leg-3dof-v1)|Custom assembly|
| Master Board v2 | 1 | [Master Board Documentation](https://github.com/open-dynamic-robot-initiative/master-board#master-board) | Custom electronics |
| Micro Driver Board v2 | 6 | [Micro Driver Documentation](../../electronics/micro_driver_electronics/README.md#micro-driver-electronics)| Custom electronics |
|Inertia Measurement Unit| 1 |[Lord Microstrain 3DM-CX5-25](https://www.microstrain.com/inertial/3dm-cx5-25)
| Part Name | Quantity | Ordering Information | Comments |
| --- | --- | --- | --- |
|3DOF Leg |4|[3DOF Leg Documentation](../leg_3dof_v1/README.md#leg-3dof-v1)|Custom assembly|
| Master Board v2 | 1 | [Master Board Documentation](https://github.com/open-dynamic-robot-initiative/master-board#master-board) | Custom electronics |
| Micro Driver Board v2 | 6 | [Micro Driver Documentation](../../electronics/micro_driver_electronics/README.md#micro-driver-electronics)| Custom electronics |
|Inertia Measurement Unit| 1 |[Lord Microstrain 3DM-CX5-25](https://www.microstrain.com/inertial/3dm-cx5-25)
[Distributors](https://www.microstrain.com/support/distributors)| Extended measurement range:
Gyro Rate: +/- 900 deg/sec. Accelerometer range: +/- 20G|
|Body Structure Back |1|[STL file](stl_files/body_structure_back.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Bottom |2|[STL file - Rev A](stl_files/body_structure_bottom_rev_a.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Center |1|[STL file](stl_files/body_structure_center.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Center Handle|1|[STL file](stl_files/body_structure_center_handle.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Center Vicon|1|[STL file](stl_files/body_structure_center_vicon.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Front |1|[STL file](stl_files/body_structure_front.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Hip AA Support |4|[STL file](stl_files/body_structure_hip_aa_support.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Side |4|[STL file](stl_files/body_structure_side.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Top IMU |1|[STL file](stl_files/body_structure_top_imu.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Body Structure Top Master Board |1|[STL file](stl_files/body_structure_top_master_board.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Led Cover |1|[STL file](stl_files/led_cover.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)
Print with transparent or translucent material.|
|Hip Adapter|2|[STL file](stl_files/hip_adapter.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Spacer Micro Driver Stack|16|[STL file](stl_files/spacer_micro_driver_stack.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Hip AA Bearing
25mm x 20mm x 4mm
ET2520 2Z VA| 4 | [Emiliana Cuscinetti](https://www.emilianacuscinetti.com/en/miniature-bearings/)
[Doppiaemme](https://www.doppiaemme.it/en/prodotti/)
[EZO USA](https://catalog.ezo-usa.com/category/metric-series-bearings)
[SBN](https://www.sbn.de/en/)|Italy: [Emiliana Cuscinetti](https://www.emilianacuscinetti.com/en/miniature-bearings/) or [Doppiaemme](https://www.doppiaemme.it/en/prodotti/)
USA: [EZO USA](https://catalog.ezo-usa.com/category/metric-series-bearings)
All other countries: Send an email to info@sbn.de and ask for a quote - they ship worldwide.
SBN # C07024
We use stainless steel bearings.|
|Fasteners Body Structure Side
M3x12 Socket Head Cap Screw|16|[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/ISO-4762-DIN-912-Zylinderkopfschrauben-mit-Innensechskant-aehnl.-DIN-912/Edelstahl-Rostfrei-A2/M-3-Gewinde-M-metrisches-Regelgewinde)|Stainless steel.
Online Schrauben ships within Europe.|
|Fasteners Body Structure Center
M3x8 Socket Head Cap Screw|8|[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/ISO-4762-DIN-912-Zylinderkopfschrauben-mit-Innensechskant-aehnl.-DIN-912/Edelstahl-Rostfrei-A2/M-3-Gewinde-M-metrisches-Regelgewinde)|Stainless steel.
Online Schrauben ships within Europe.|
|Fasteners Hip AA Actuator Modules
M2,5x10 Socket Head Cap Screw|16|[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/ISO-4762-DIN-912-Zylinderkopfschrauben-mit-Innensechskant-aehnl.-DIN-912/Edelstahl-Rostfrei-A2/M-2,5-Gewinde-M-metrisches-Regelgewinde)|Stainless steel.
Online Schrauben ships within Europe.|
|Fasteners Hip AA Support
M3x14 Socket Head Cap Screw|8|[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/ISO-4762-DIN-912-Zylinderkopfschrauben-mit-Innensechskant-aehnl.-DIN-912/Edelstahl-Rostfrei-A2/M-3-Gewinde-M-metrisches-Regelgewinde)|Stainless steel.
Online Schrauben ships within Europe.|
|Fasteners Micro Driver Stack
M2,5x25 Socket Head Cap Screw|8|[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/ISO-4762-DIN-912-Zylinderkopfschrauben-mit-Innensechskant-aehnl.-DIN-912/Edelstahl-Rostfrei-A2/M-2,5-Gewinde-M-metrisches-Regelgewinde)|Stainless steel.
Online Schrauben ships within Europe.|
|Fasteners IMU|3|M2,5x16 Slotted Screw
Conrad 839940-62|Polyamide Plastic
Shorten to 13mm|
|Helicoil M3 x 4,5mm|32|[RS 470-838](https://de.rs-online.com/web/p/reparatur-einsatzgewinde/0470838/)
[Hoffmann 082812 M3](https://www.hoffmann-group.com/GB/en/houk/Power-tools-and-workshop-supplies/Soldering-tools-cleaning-devices-thread-repair/Thread-insert-set%2C-10-or-20-pieces-1-5×D/p/082812-M3?tId=438)|1,5xD
Böllhoff 41890030045|
|Vicon Markers Ø 9,5mm | 13 |[Vicon Distributors](https://www.vicon.com/contact/)|Reflective Vicon Marker, solid, on plastic foot, Ø 9,5mm|
|Fasteners Vicon Markers
M4x10 Set Screw | 13 |[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/DIN-913-Gewindestifte-mit-Innensechskant-und-Kegelkuppe-aehnl.-ISO-4026/Edelstahl-Rostfrei-A2/M-4-Gewinde-M-metrisches-Gewinde)|Stainless steel.
Online Schrauben ships within Europe.|
## Preparing the 3d printed parts
## Quadruped Robot Wiring Details
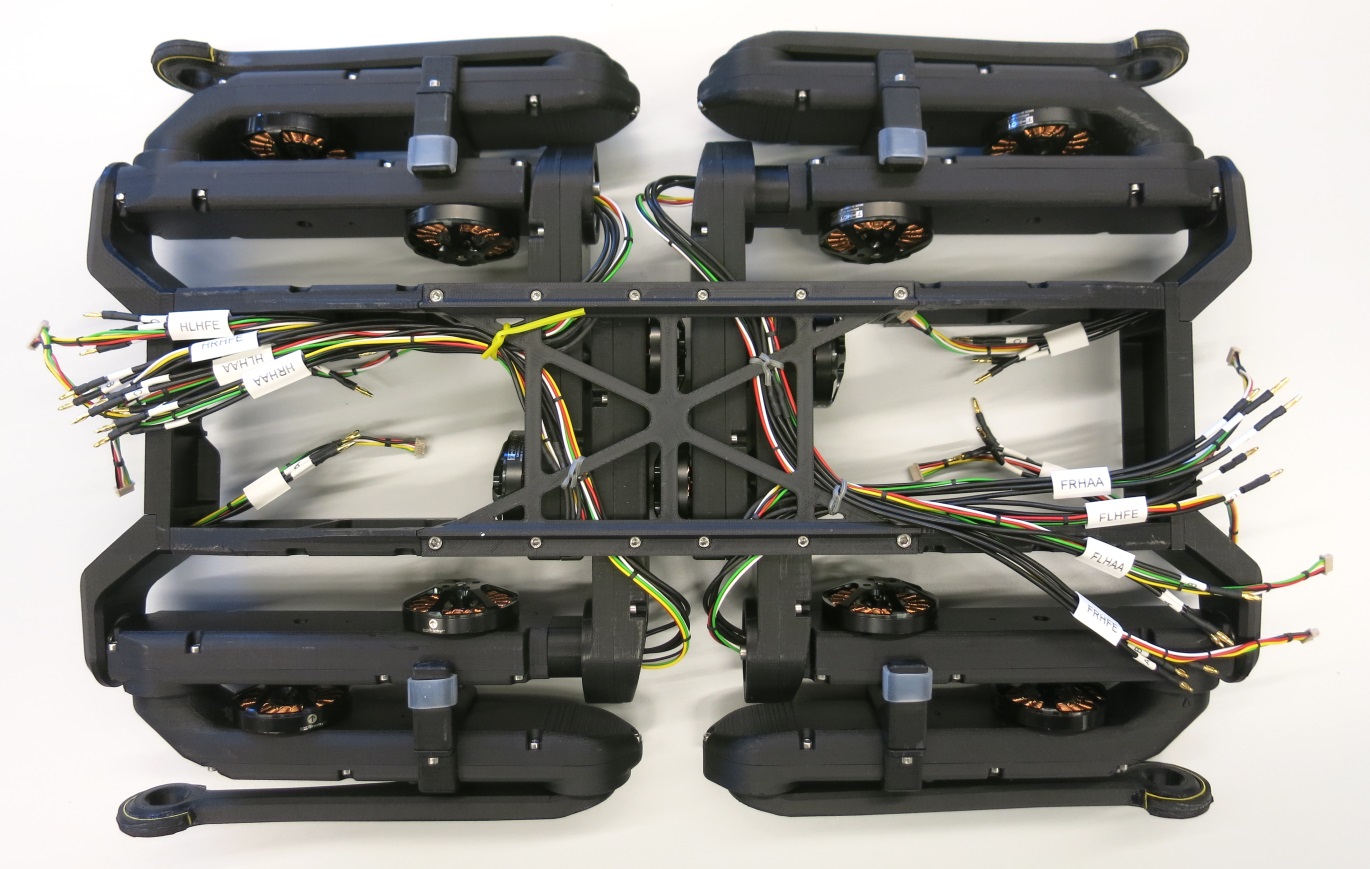
*Wiring Quadruped Robot - Bottom View*
* The wiring of the robot is described on a separate page: [Details Electronics 12dof Quadruped](details/details_electronics_quadruped_12dof.md#details-electronics-quadruped-robot-12dof-v1)
## Micro Driver Stack Motor Assignment
 ---
---
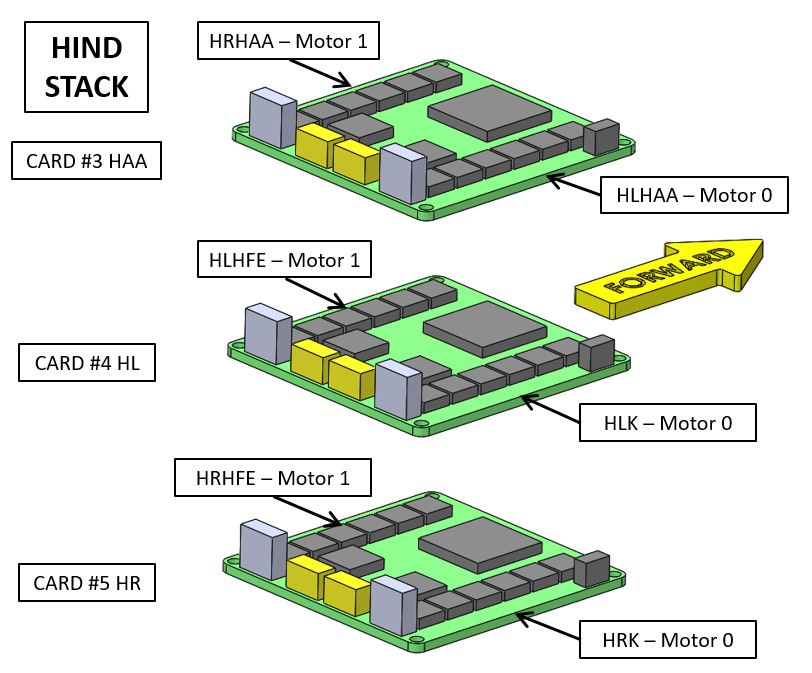 | Joint ID | Joint Name | Motor Driver Card | Motor Port |Motor Index |
| --- | --- | --- | --- | ---|
|0|FL_HAA|0|0|0|
|1|FL_HFE|1|1|3|
|2|FL_K|1|0|2|
|3|FR_HAA|0|1|1|
|4|FR_HFE|2|1|5|
|5|FR_K|2|0|4|
|6|HL_HAA|3|0|6|
|7|HL_HFE|4|1|9|
|8|HL_K|4|0|8|
|9|HR_HAA|3|1|7|
|10|HR_HFE|5|1|11|
|11|HR_K|5|0|10|
## Vicon Object
| Joint ID | Joint Name | Motor Driver Card | Motor Port |Motor Index |
| --- | --- | --- | --- | ---|
|0|FL_HAA|0|0|0|
|1|FL_HFE|1|1|3|
|2|FL_K|1|0|2|
|3|FR_HAA|0|1|1|
|4|FR_HFE|2|1|5|
|5|FR_K|2|0|4|
|6|HL_HAA|3|0|6|
|7|HL_HFE|4|1|9|
|8|HL_K|4|0|8|
|9|HR_HAA|3|1|7|
|10|HR_HFE|5|1|11|
|11|HR_K|5|0|10|
## Vicon Object

*Body Structure Center Plate with Vicon Markers - weight: 43g*
* You can use this Vicon object for base state estimation
* It can be installed instead of the Body Structure Center Plate
* You can download the Vicon Object here: [Solo12 Vicon Object](details/vicon_object_quadruped_12dof.zip)
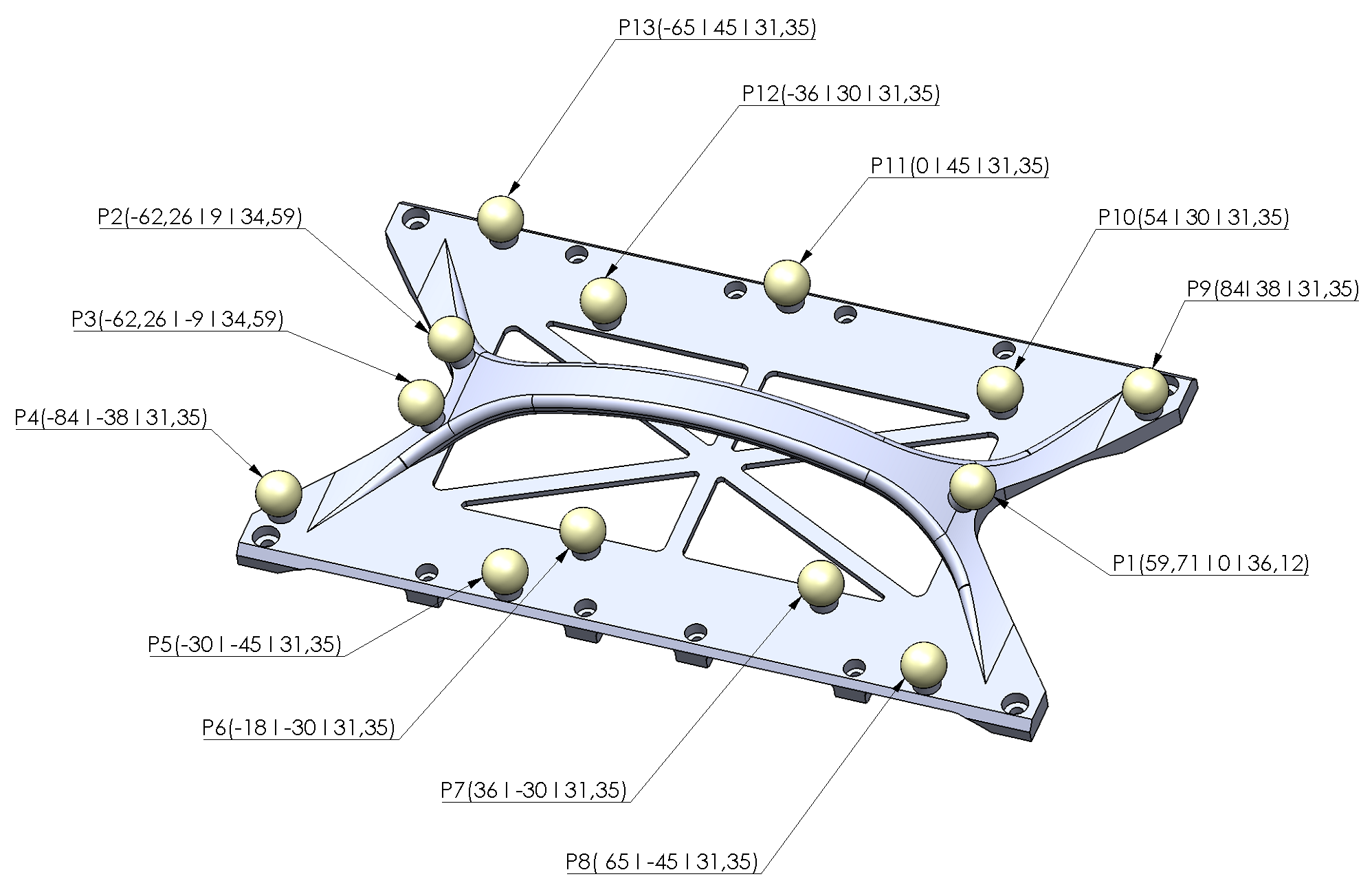
*Click on picture above to view the PDF drawing*
## Robot Coordinate System Origin

* more information about the conventions that we use for our robots: [Conventions](../general/conventions.md#conventions)
## Inertial Sensor Origin Position
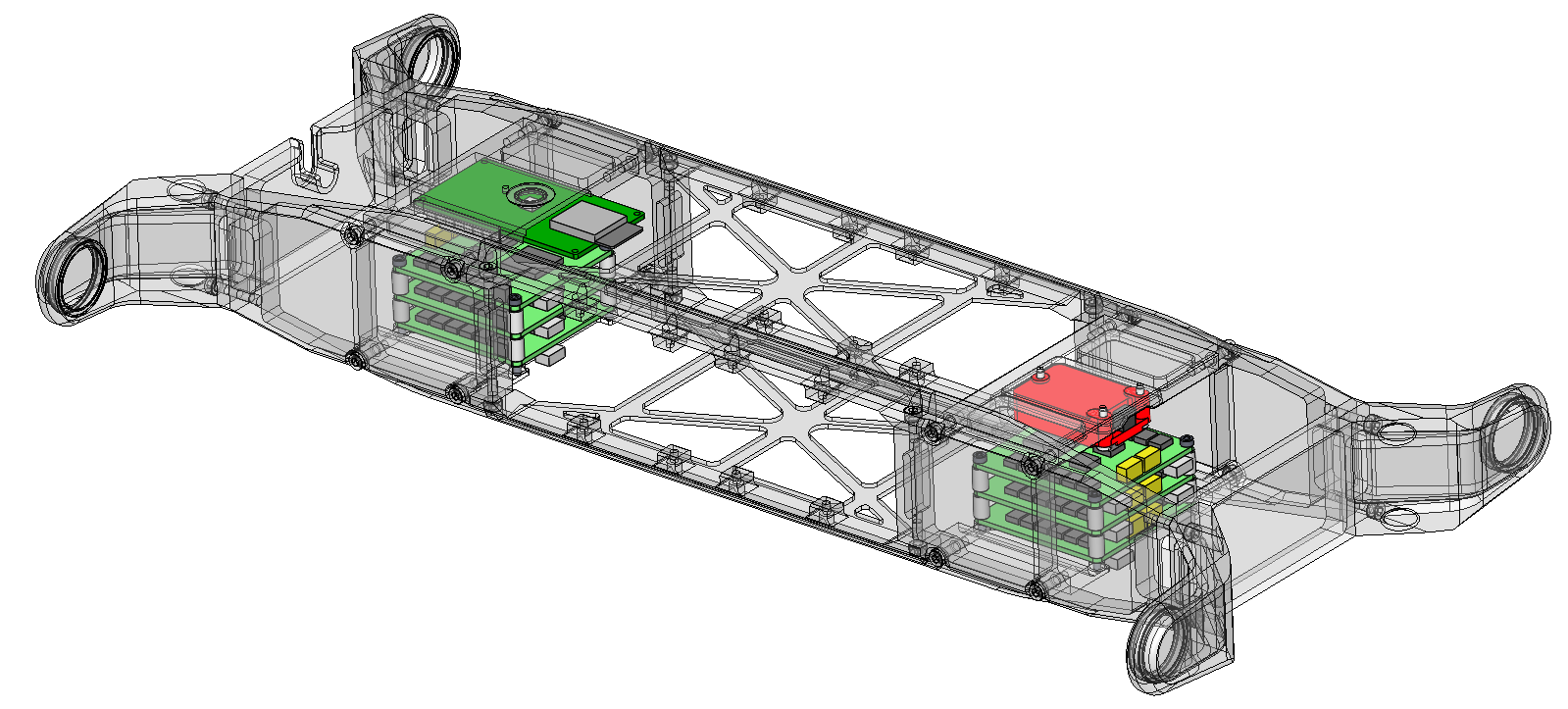
*IMU Mounting Position - the IMU is colored red in the screenshot above.*
* the IMU is mounted in the front of the robot
* the label on the IMU is pointing downwards (see picture below)
* the coordinate systems of the IMU and the Quadruped Robot have the same orientation - more information here: [Coordinate System Conventions](../general/conventions.md#conventions)
* the offset between the coordinate systems is documented below
* the IMU origin is **not** in the geometrical center of the IMU
* [IMU Technical Drawing - see Page 2](https://s3.amazonaws.com/download.microstrain.com/Drawings/3065-0291-ICD.pdf)
|IMU Origin Position in the
Robot Coordinate System| X | Y | Z |
| --- | --- | --- | --- |
||104,07mm|-6,35mm|15,40mm|

## Simplified 3D Model
The simplified STL files for visualization and simulation can be found here: [STL Files Visualization](stl_files_for_visualization)

*Click on picture above to view the PDF drawing*
## Quadruped Inertia Parameters for Simulation
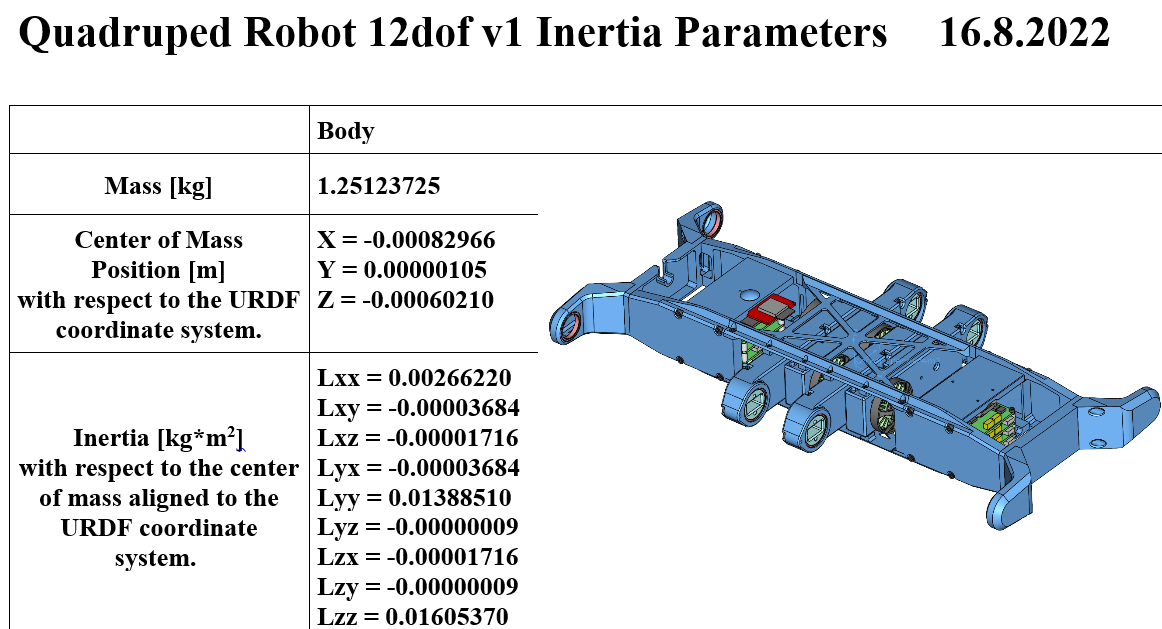
*Quadruped Inertia Parameters - Click on picture to view PDF document.*
## Robot Stand

| Part Name | Quantity | Ordering Information | Comments |
| --- | --- | --- | --- |
|Stand Fork|2|[STL file](stl_files/stand_fork.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Stand Foot|4|[STL file](stl_files/stand_foot.STL)|[3d printed part](../actuator_module_v1/details/details_3d_printed_parts.md#details-3d-printed-parts)|
|Slotted Profile Vertical|2|[Item 7.0.000.09](https://product.item24.de/en/products/product-catalogue/productdetails/products/line-8-construction-profiles-1001042794/profile-8-40x40-e-natural-7000009/) or
[Item 0.0.641.61](https://us-product.item24.com/en/productdetails/products/profiles-and-accessories-1001043003/profile-kh-8-40x40-anthracite-64161/)|Size 8 - 40mm x 40mm
Length: 40cm
Aluminum or Wood-PP composite|
|Slotted Profile Horizontal|1|[Item 7.0.000.09](https://product.item24.de/en/products/product-catalogue/productdetails/products/line-8-construction-profiles-1001042794/profile-8-40x40-e-natural-7000009/) or
[Item 0.0.641.61](https://us-product.item24.com/en/productdetails/products/profiles-and-accessories-1001043003/profile-kh-8-40x40-anthracite-64161/)|Size 8 - 40mm x 40mm
Length: 35cm
Aluminum or Wood-PP composite|
|Angle Bracket|4|[Item 0.0.411.15](https://product.item24.de/en/products/product-catalogue/productdetails/products/angle-brackets-zn-1001046547/angle-bracket-set-8-40x40-41115/)|90 degree angle bracket 40mm|
|Fastener Stand Fork
M8x25 Flat Head Screw|2|[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/ISO-10642-DIN-7991-Senkschrauben-mit-Innensechskant-aehnl.-DIN-7991/Edelstahl-Rostfrei-A2/M-8-Gewinde-M-metrisches-Gewinde)|Stainless steel.
Online Schrauben ships within Europe.|
|Fastener Stand Foot
M5x20 Socket Head Cap Screw|8|[Online Schrauben](https://online-schrauben.de/shop/Schrauben/Innensechskantschrauben/ISO-4762-DIN-912-Zylinderkopfschrauben-mit-Innensechskant-aehnl.-DIN-912/Edelstahl-Rostfrei-A2/M-5-Gewinde-M-metrisches-Regelgewinde)|Stainless steel.
Online Schrauben ships within Europe.|
|Rubber Feet|4|[RS 173-5948](https://export.rsdelivers.com/product/rs-pro/fsq821-bl-50/rs-pro-round-anti-vibration-feet-206mm-pur/1735948)|Square Feet
20.6mm x 20.6mm x 7.6mm|

*12dof Quadruped Robot on Stand*
## Robot Calibration
 * [Details Quadruped 12dof Calibration Tool](../general/robot_calibration.md#calibration-tool-quadruped-12dof)
## View the Quadruped CAD Model in your Web Browser
* [Details Quadruped 12dof Calibration Tool](../general/robot_calibration.md#calibration-tool-quadruped-12dof)
## View the Quadruped CAD Model in your Web Browser
*Quadruped Robot 12dof standing - Click on picture to view the cad model in your browser*

*Quadruped Robot 12dof sitting - Click on picture to view the cad model in your browser*
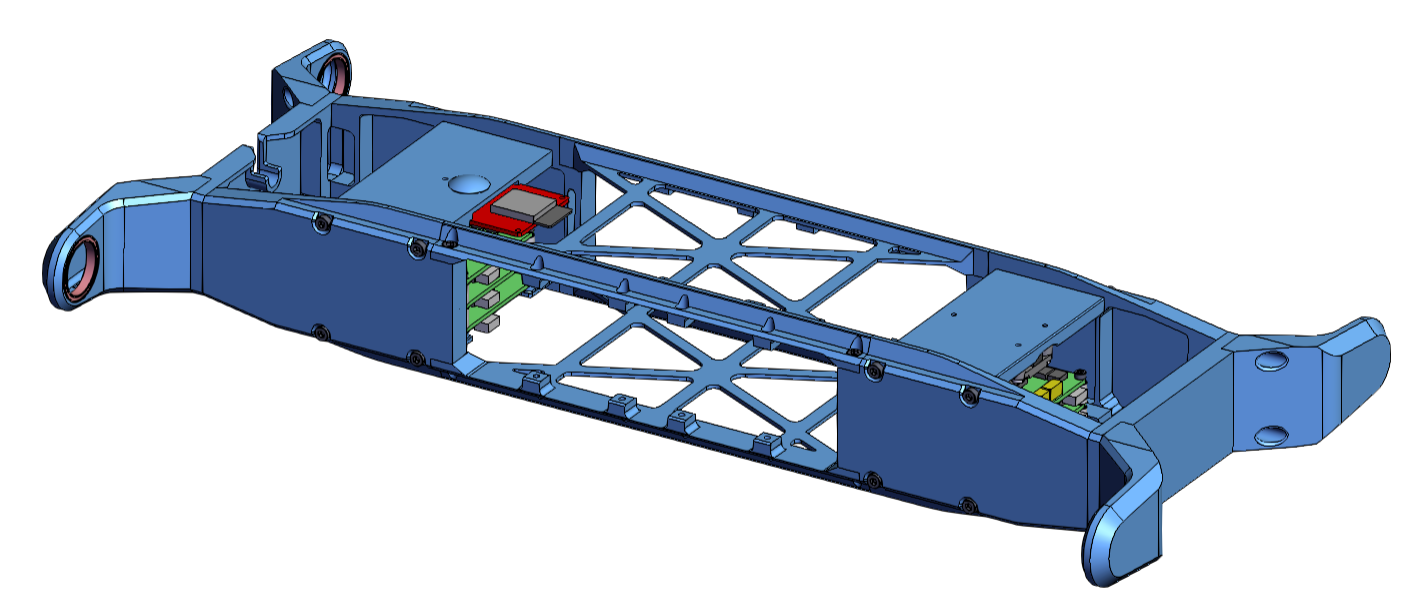
*Quadruped Robot 12dof Body Structure - Click on picture to view the cad model in your browser*
## CAD Files
The Solidworks CAD files are available here: [Quadruped 12dof v1 Solidworks CAD files](solidworks_files/quadruped_12dof_v1.zip)
## More Information
[Open Dynamic Robot Initiative - Webpage](https://open-dynamic-robot-initiative.github.io)
[Open Dynamic Robot Initiative - YouTube Channel](https://www.youtube.com/channel/UCx32JW2oIrax47Gjq8zNI-w)
[Open Dynamic Robot Initiative - Forum](https://odri.discourse.group/categories)
[Open Dynamic Robot Initiative - Paper](https://arxiv.org/pdf/1910.00093.pdf)
[Hardware Overview](../../README.md#open-robot-actuator-hardware)
[Software Overview](https://github.com/open-dynamic-robot-initiative/open-dynamic-robot-initiative.github.io/wiki)
## Authors
Felix Grimminger
## License
BSD 3-Clause License
## Copyright
Copyright (c) 2019-2021, Max Planck Gesellschaft and New York University