# TriFingerEdu v1
*TriFinger Manipulator Platform*
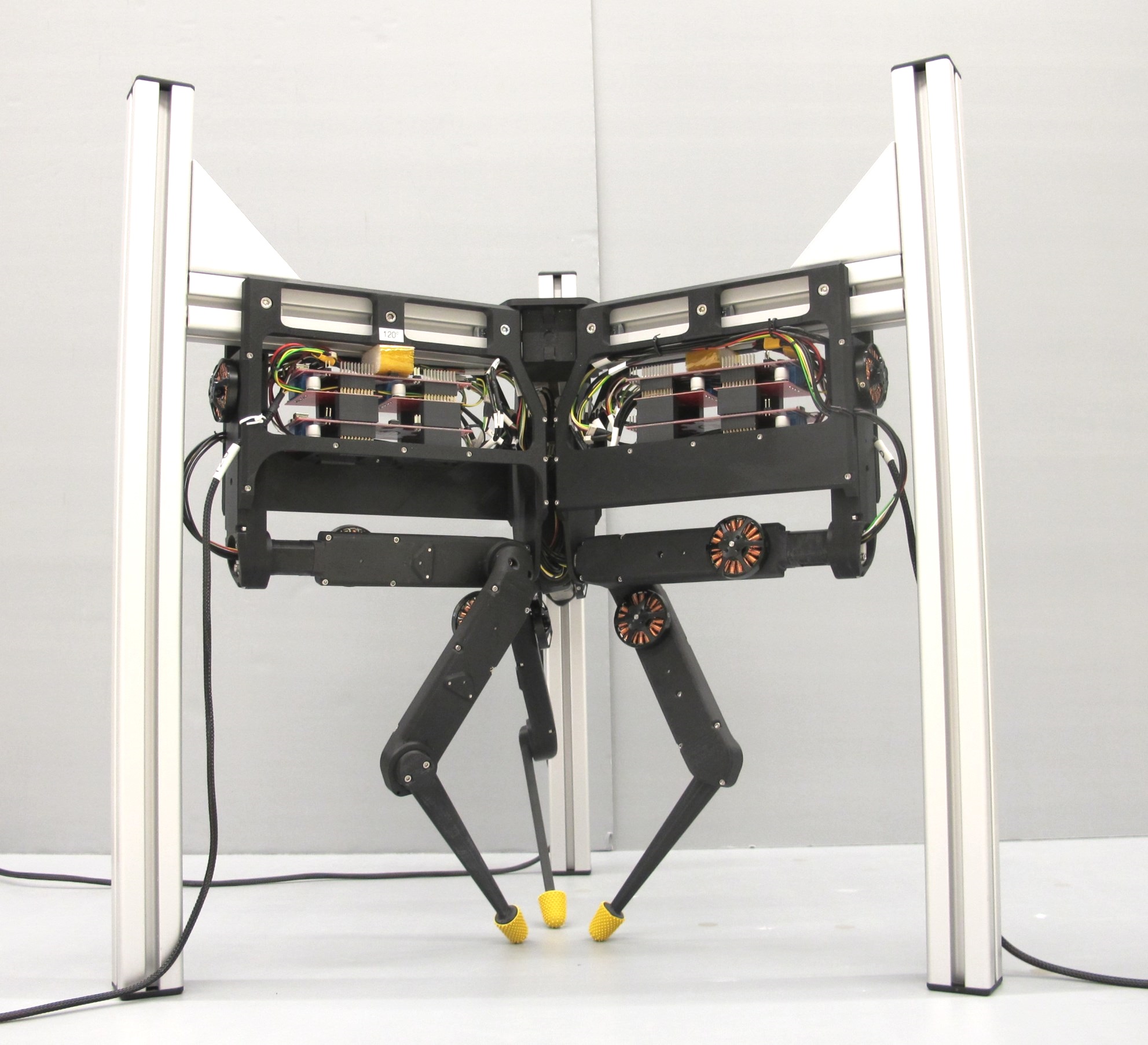
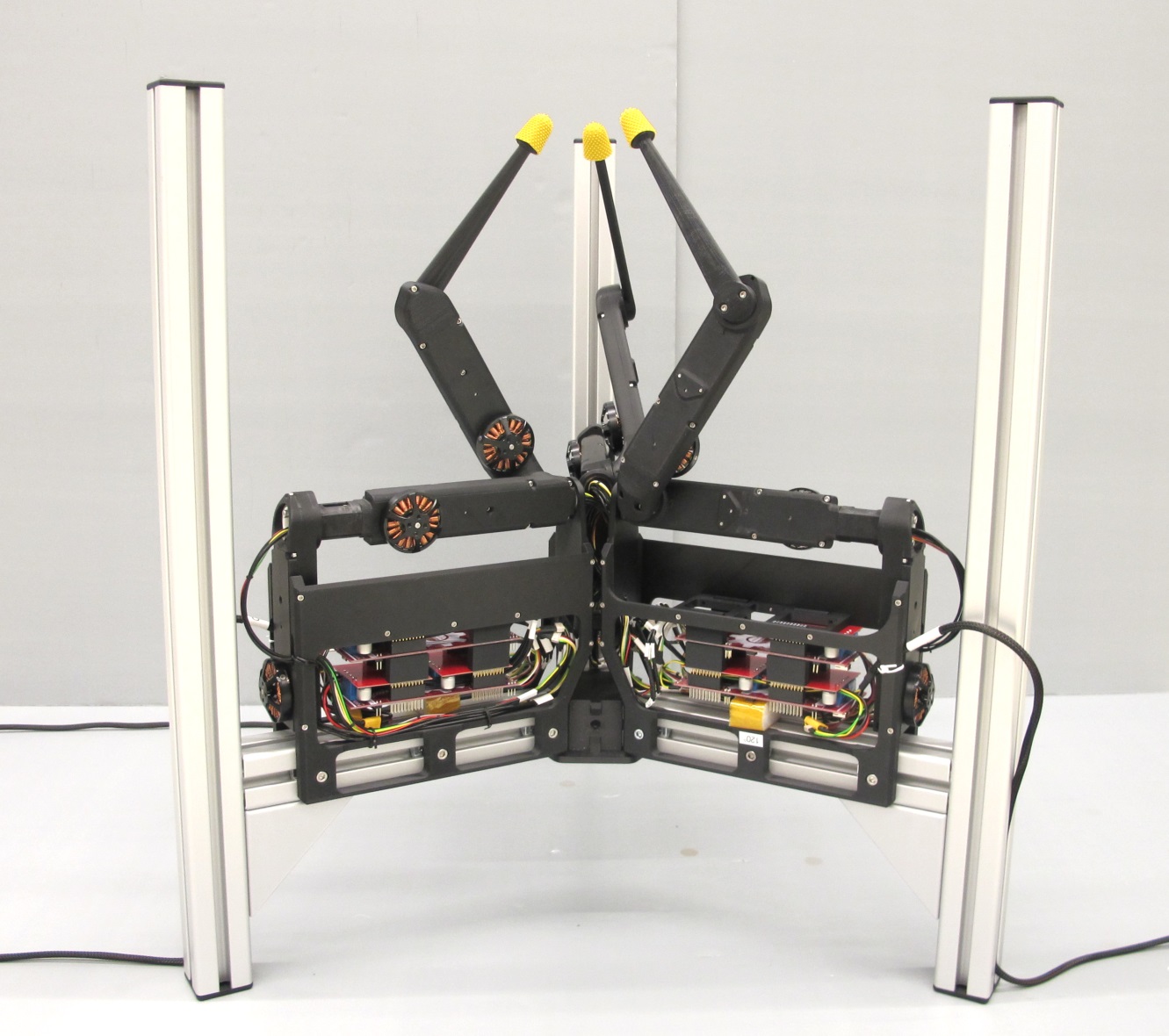
* the manipulator platform has 9 torque-controlled degrees of freedom
* it consists of 3 identical finger modules attached to an aluminum frame structure
* the finger module is describes in detail here: [Finger Module Page.](../finger_edu_v1/README.md)
* the frame an the required components are described below
*Finger modules assembled - weight: 930g each*
*TriFinger Manipulator Platform - picture overlay
Picture: Felix Widmaier, Manuel Wüthrich and Shruti Joshi*
## Frame
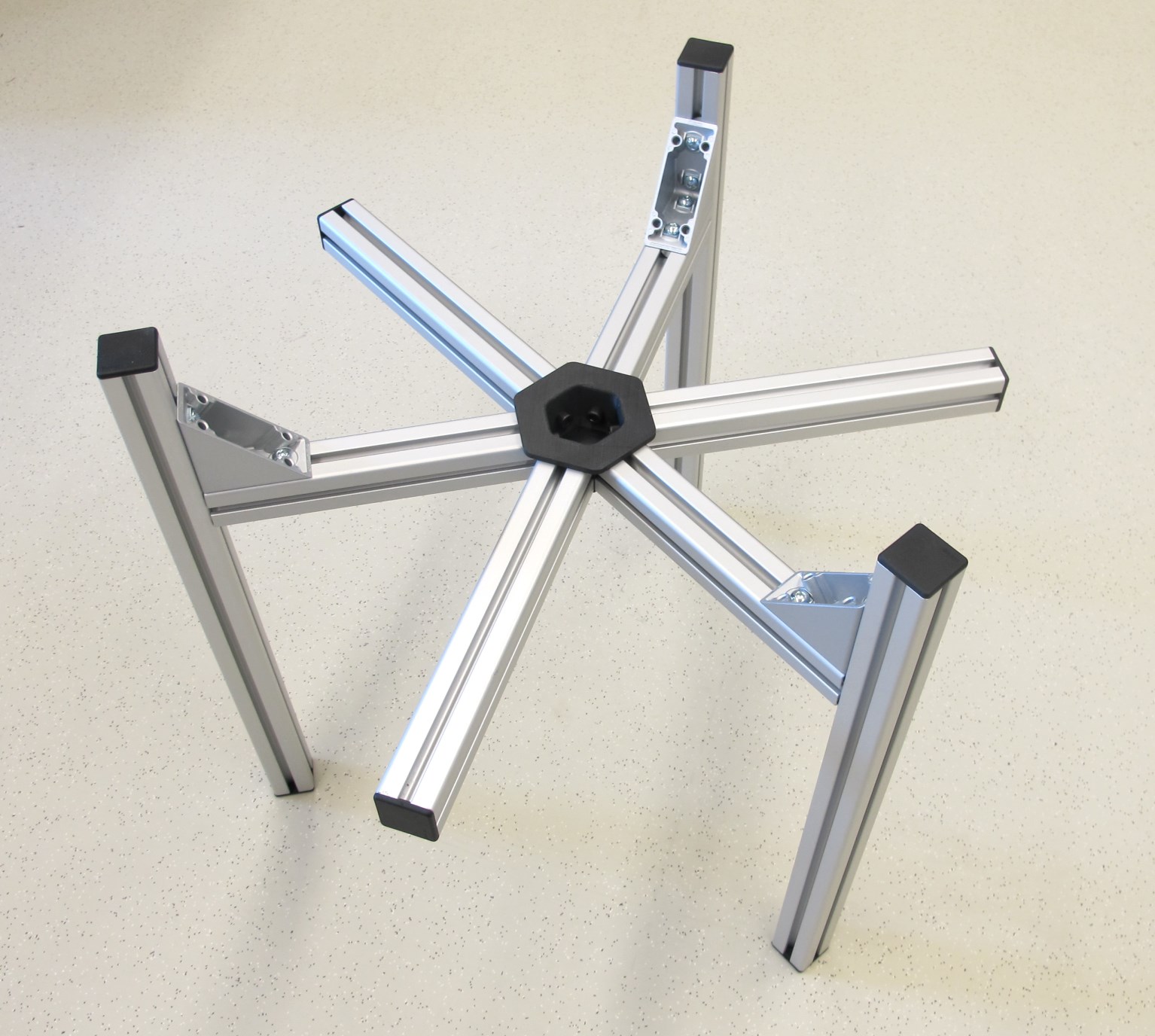
*Frame structure - t-slotted aluminum profiles*
* The frame structure consists of aluminum profiles from Item.
* You will need the following components to build the frame.
### Aluminum profiles

*Item Aluminum profile*
* Item aluminum profiles - Size 8 - 40mm x 40mm - Item part number: 0.0.026.33
* Cut the profiles to length according to [this drawing](details/aluminum_profiles.pdf).
### Angle brackets

*Item 90 degree angle bracket*
* 3 x 90 degree large angle brackets - Item part number: 0.0.411.32
### End caps

*Item end caps*
* 9 x end caps - size 8 - Item part number: 0.0.026.01
### T-slot nuts

*Item M5 t-slot nuts*
* T-slot nuts M5 - Item part number: 0.0.480.54
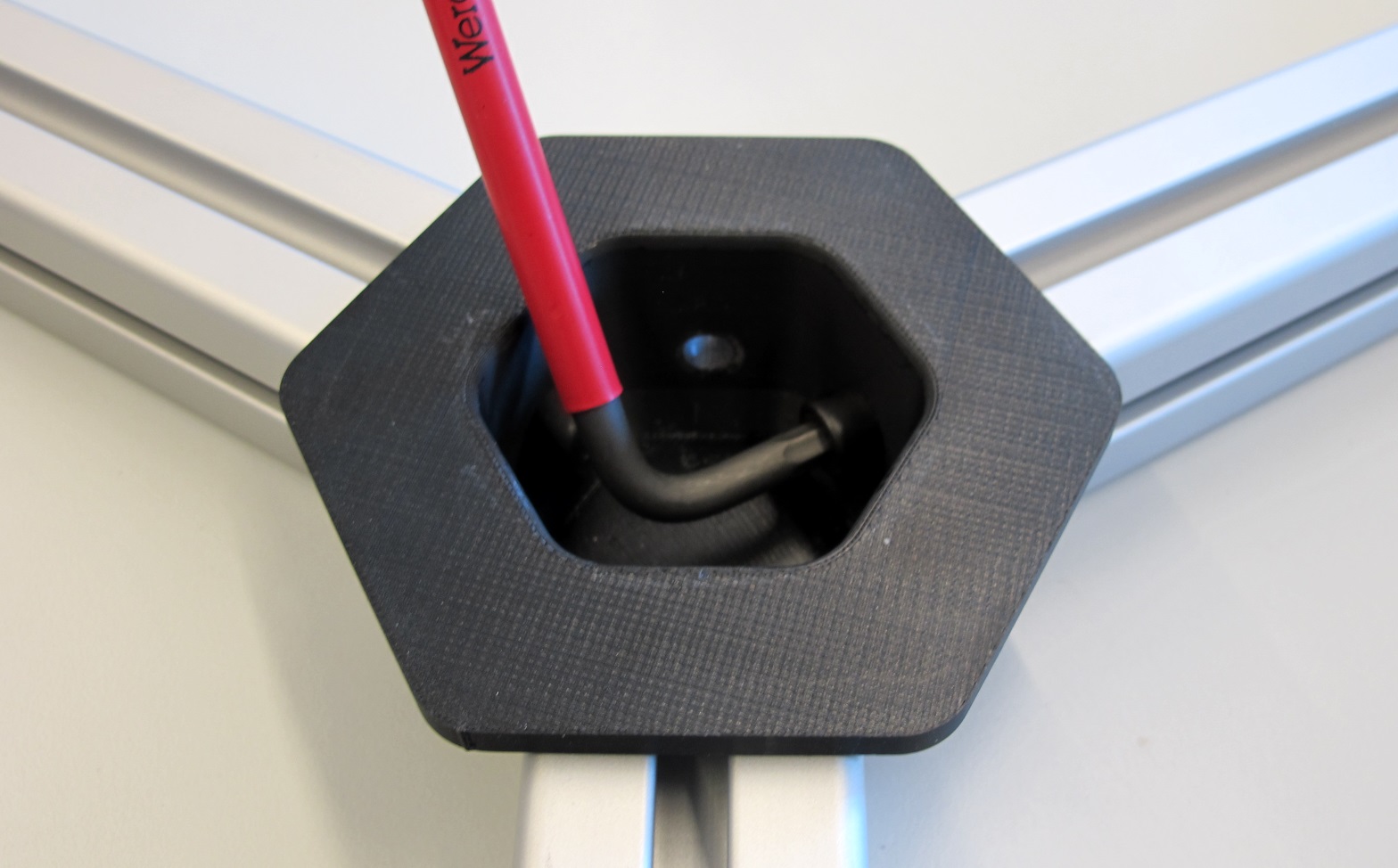
### Center connector

*3d printed frame center connector*
* 3d printed center connector - [STL file](stl_files/frame_center_connector_top.STL)
### Barrier

*Barrier - consisting of 3 polycarbonate sheets*
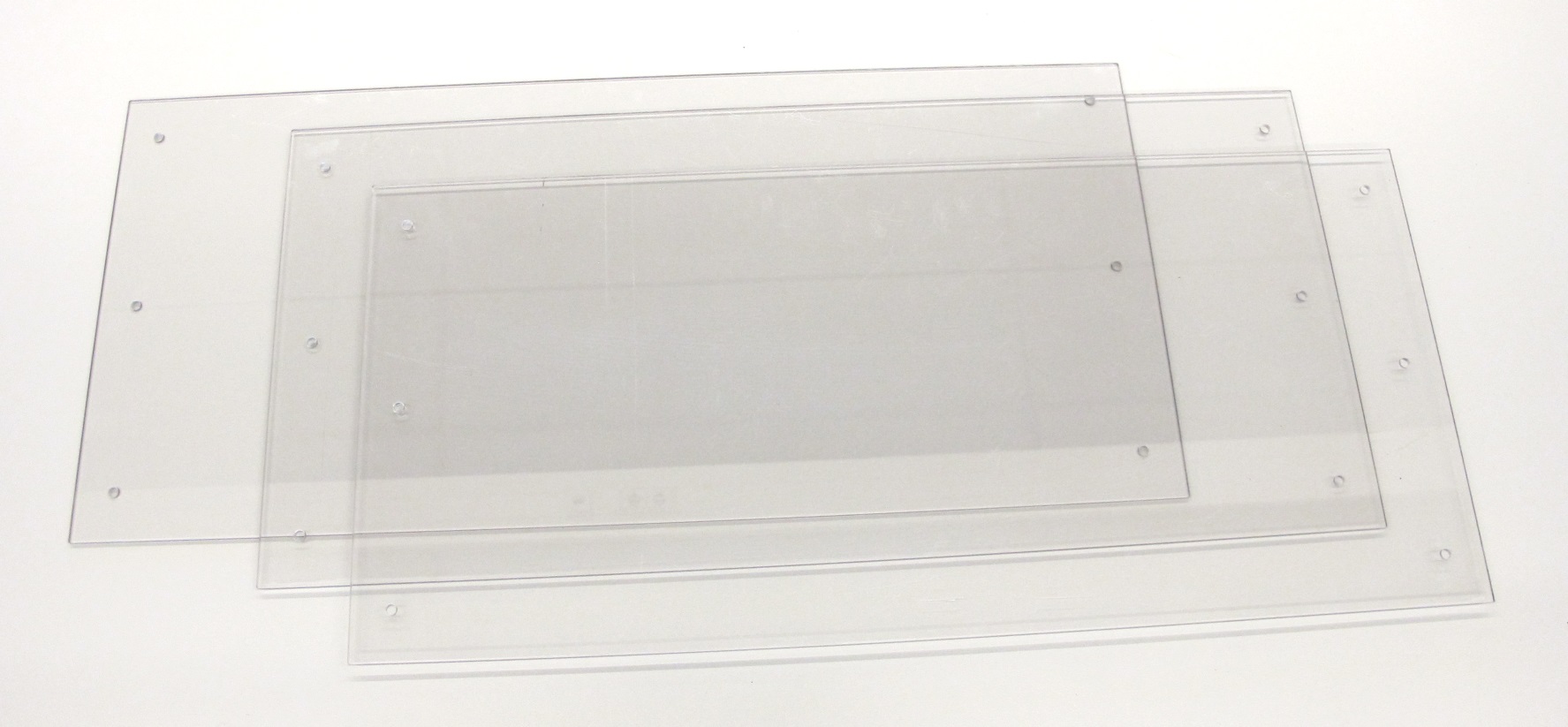
*3mm polycarbonate sheets*
* We use 3mm polycarbonate sheets to keep the objects inside of the manipulation area.
* Cut the polycarbonate sheets to size according to [this drawing](details/frame_barrier.pdf).
### Camera arm

*Camera mount for Baseler camera*
* 3d printed camera mount - [STL file](stl_files/camera_mount.STL)
### Cameras

*Basler camera with Basler lens*
* Basler camera: acA720-520uc
* Basler lens: C125-0418-5M
## Assembly

*Frame assembly - 6mm hex driver*
*Frame assembly - 6mm allen key*
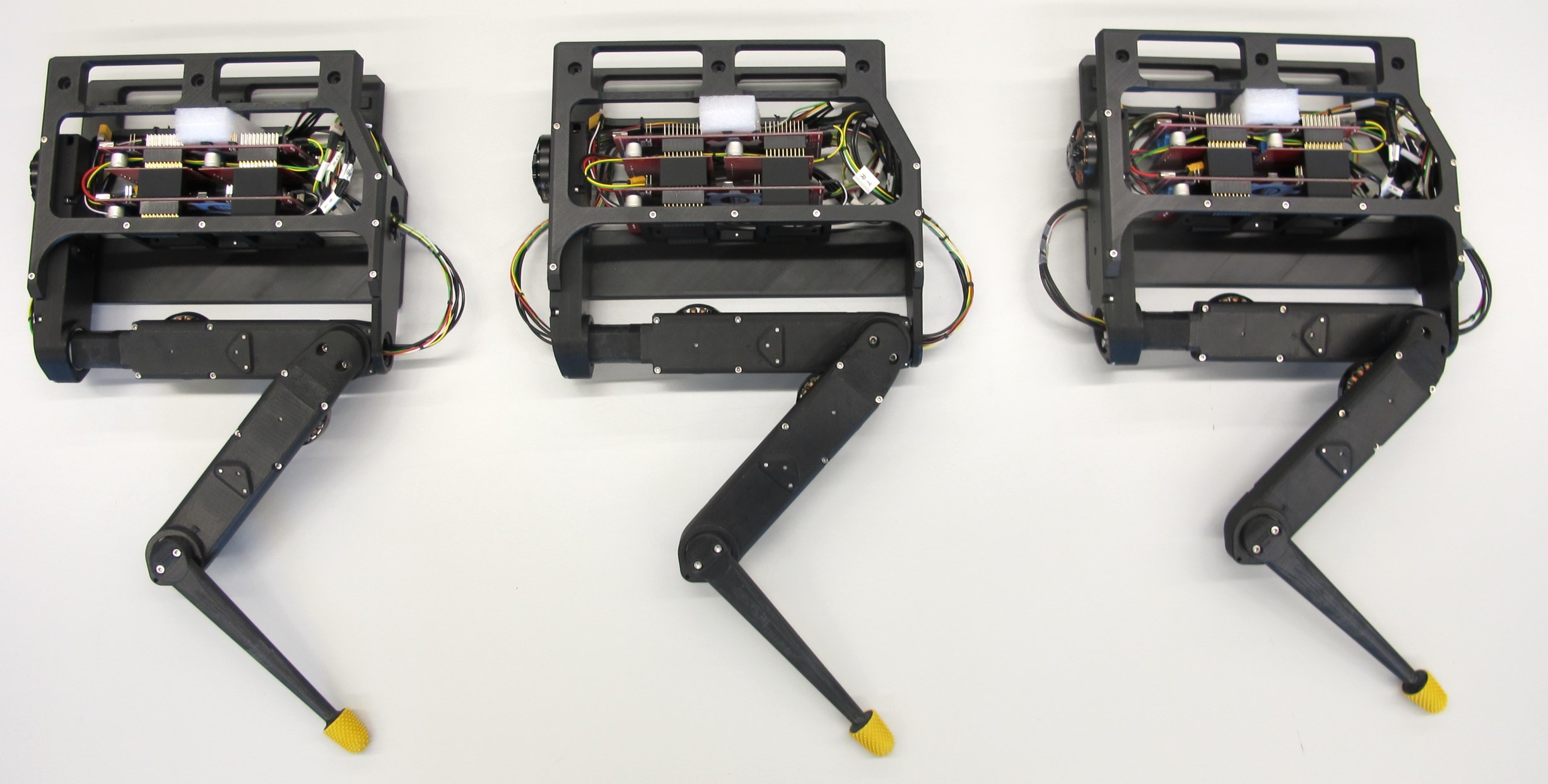
## Transport

*The finger modules can be stacked for transport. Weight: 8kg*
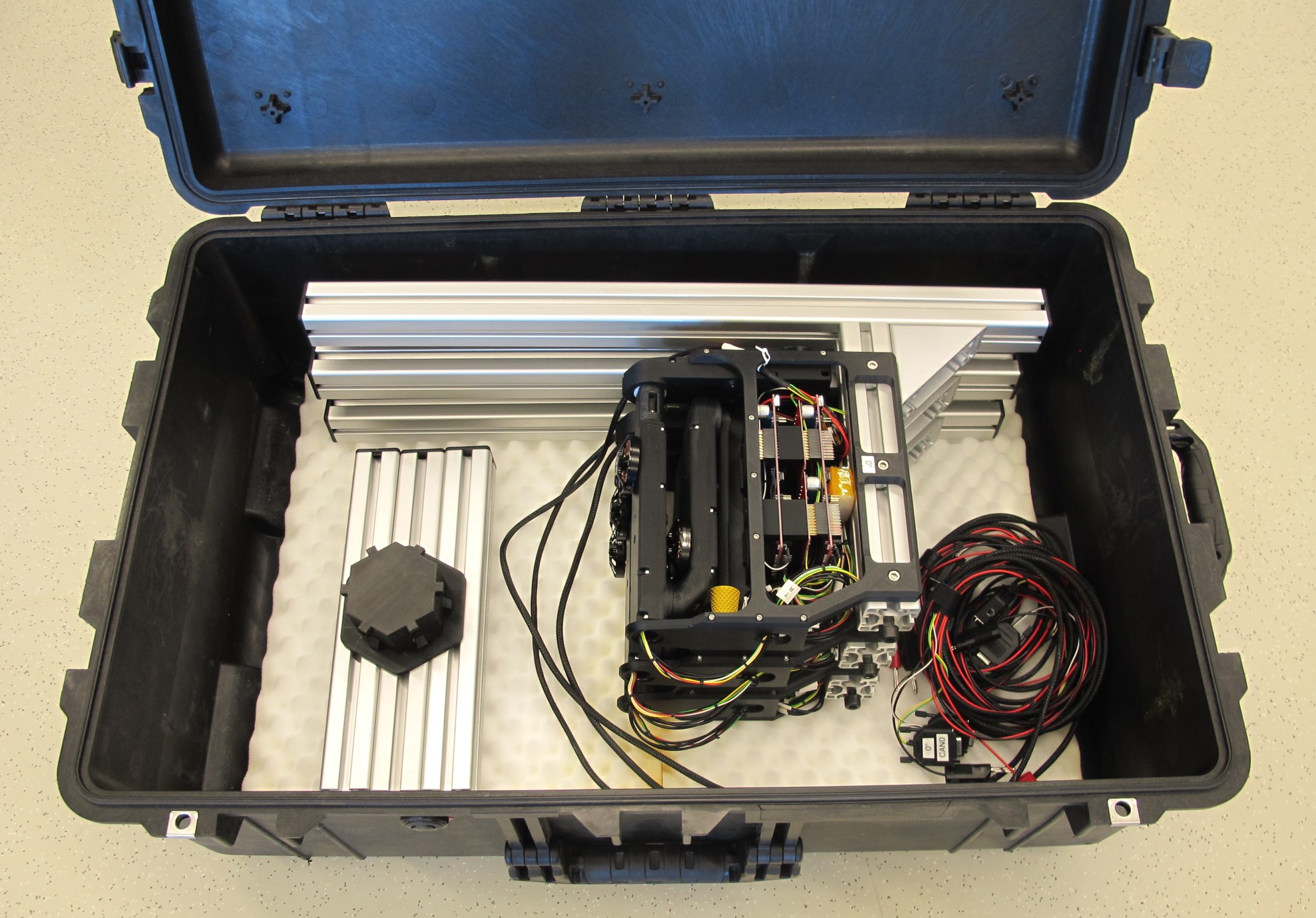
*All the components fit into a 1650 Pelican case. Total weight: 21kg*
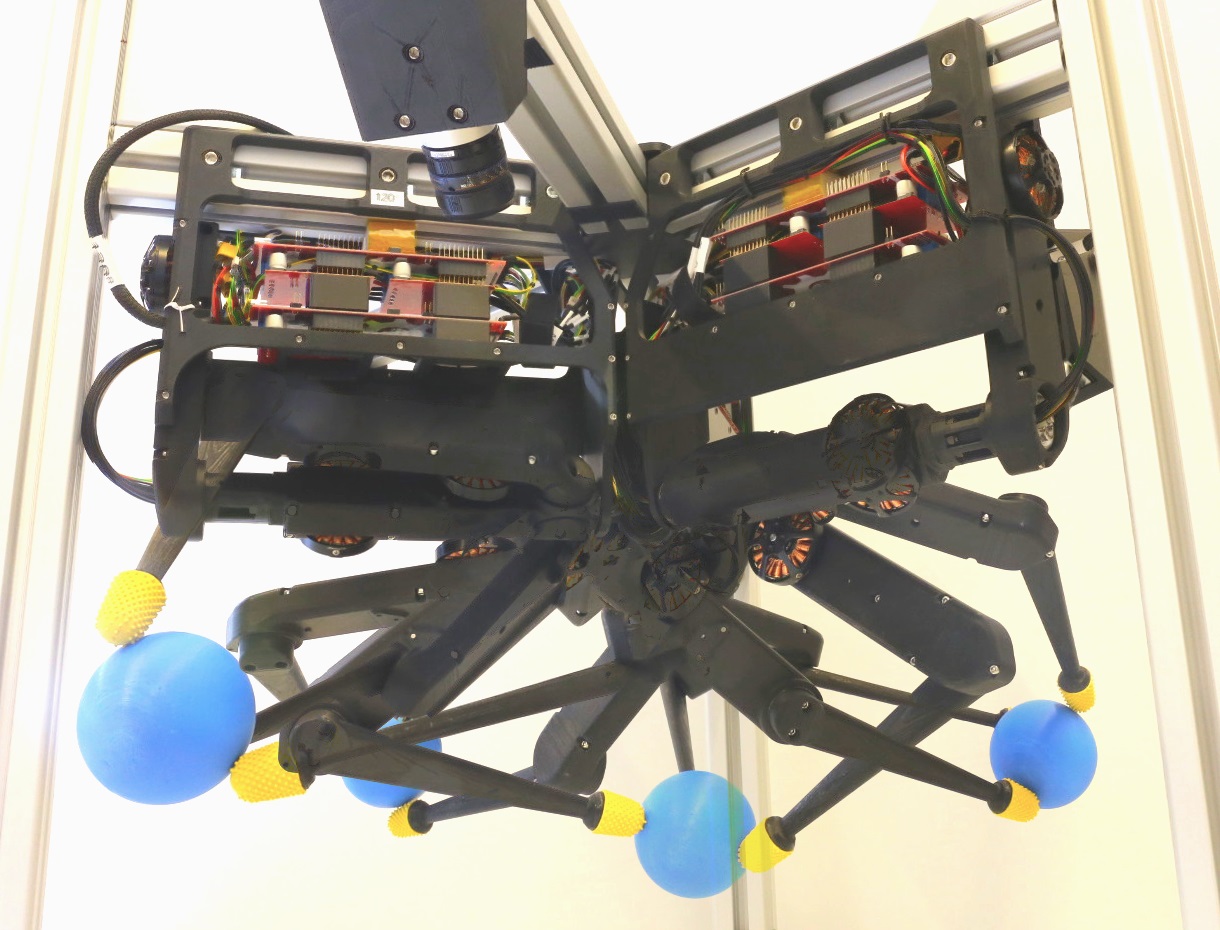
## Upside down
*The manipulator platform can also be used upside down*
## 3D Model for Visualization
The simplified STL files for visualization and simulation can be found here: [STL Files Visualization](stl_files_for_visualization)
*Click on picture above to view the PDF drawing*
----
## View the TriFinger cad model in your web browser

*TriFinger Edu v1
Click on the picture to view the cad model in your browser*
---
## More Information
[Open Dynamic Robot Initiative - Webpage](https://open-dynamic-robot-initiative.github.io)
[Open Dynamic Robot Initiative - YouTube Channel](https://www.youtube.com/channel/UCx32JW2oIrax47Gjq8zNI-w)
[Open Dynamic Robot Initiative - Forum](https://odri.discourse.group/categories)
[Open Dynamic Robot Initiative - Paper](https://arxiv.org/pdf/1910.00093.pdf)
[Hardware Overview](../../README.md#open-robot-actuator-hardware)
[Software Overview](https://github.com/open-dynamic-robot-initiative/open-dynamic-robot-initiative.github.io/wiki)
---
## Authors
Felix Grimminger
## License
BSD 3-Clause License
## Copyright
Copyright (c) 2019-2020, Max Planck Gesellschaft and New York University