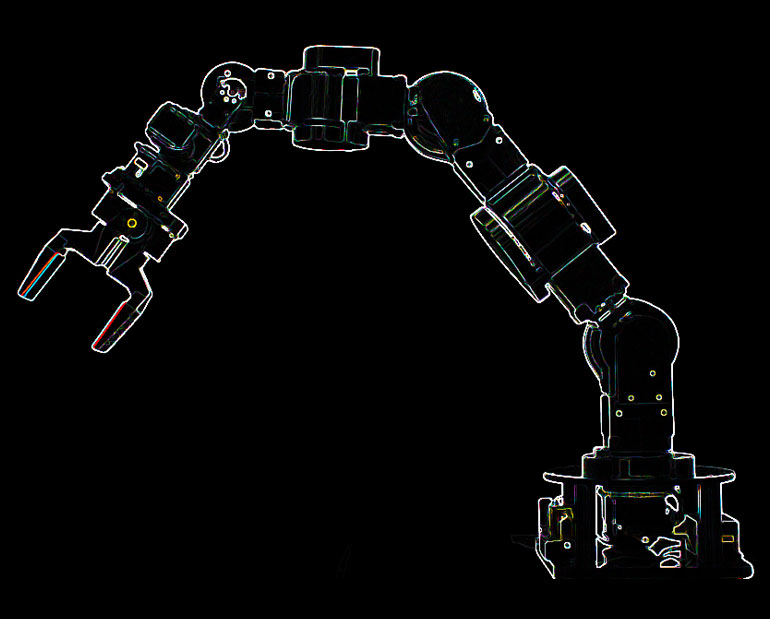
This project was about creating a ROS interfacing package for a 7-DOF robotic arm.
The interfacing package include ROS driver, ROS controllers and ROS robot model.
Details
Date:June 1, 2013
Client:U.S.A based robotic firm
Category:Robotic application
Skills used:Robot Operating System, C++ and Python