I k
# Optimal Transport Aggregation for Visual Place Recognition
Sergio Izquierdo, Javier Civera
Code and models for Optimal Transport Aggregation for Visual Place Recognition (DINOv2 SALAD).
## Summary
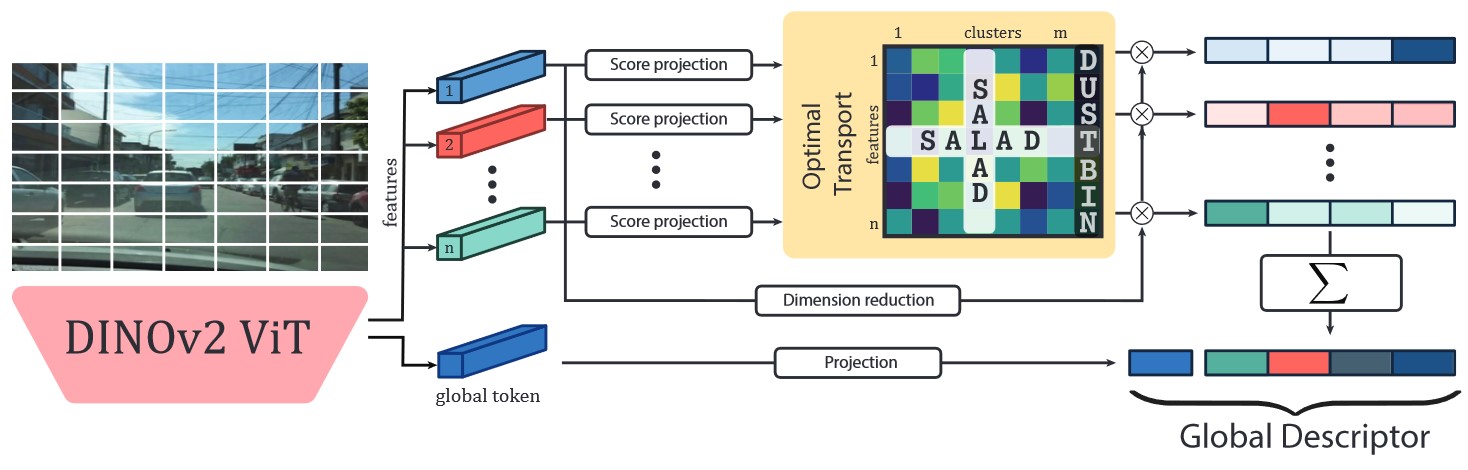
We introduce DINOv2 SALAD, a Visual Place Recognition model that achieves state-of-the-art results on common benchmarks. We introduce two main contributions:
- Using a finetuned DINOv2 encoder to get richer and more powerful features.
- A new aggregation technique based on optimal transport to create a global descriptor based on optimal transport. This aggregation extends NetVLAD to consider feature-to-cluster relations as well as cluster-to-features. Besides, it includes a dustbin to discard uninformative features.
For more details, check the paper at [arXiv](https://arxiv.org/abs/2311.15937).
## Setup
It has been tested on Pytorch 2.1.0 with CUDA 12.1 and Xformers. Create a ready to run environment with:
```bash
conda env create -f environment.yml
```
To quickly test and use our model, you can use Torch Hub:
```python
import torch
model = torch.hub.load("serizba/salad", "dinov2_salad")
model.eval()
model.cuda()
```
## Dataset
For training, download [GSV-Cities](https://github.com/amaralibey/gsv-cities) dataset. For evaluation download the desired datasets ([MSLS](https://github.com/FrederikWarburg/mapillary_sls), [NordLand](https://surfdrive.surf.nl/files/index.php/s/sbZRXzYe3l0v67W), [SPED](https://surfdrive.surf.nl/files/index.php/s/sbZRXzYe3l0v67W), or [Pittsburgh](https://data.ciirc.cvut.cz/public/projects/2015netVLAD/Pittsburgh250k/))
## Train
Training is done on GSV-Cities for 4 complete epochs. It requires around 30 minutes on an NVIDIA RTX 3090. For training DINOv2 SALAD run:
```bash
python3 main.py
```
After training, logs and checkpoints should be on the `logs` dir.
## Evaluation
You can download a pretrained DINOv2 SALAD model from here:
| Model Name |
Descriptor size |
Download link |
| dino_salad |
8192+256 |
download |
| dino_salad_512_32 |
512 + 32 |
download |
| dino_salad_2048_64 |
2048+64 |
download |
For evaluating run:
```bash
python3 eval.py --ckpt_path 'weights/dino_salad.ckpt' --image_size 322 322 --batch_size 256 --val_datasets MSLS Nordland
```
| MSLS Challenge |
MSLS Val |
NordLand |
| R@1 |
R@5 |
R@10 |
R@1 |
R@5 |
R@10 |
R@1 |
R@5 |
R@10 |
| 75.0 |
88.8 |
91.3 |
92.2 |
96.4 |
97.0 |
76.0 |
89.2 |
92.0 |
## Acknowledgements
This code is based on the amazing work of:
- [MixVPR](https://github.com/amaralibey/MixVPR)
- [GSV-Cities](https://github.com/amaralibey/gsv-cities)
- [DINOv2](https://github.com/facebookresearch/dinov2)
## Cite
Here is the bibtex to cite our paper
```
@InProceedings{Izquierdo_CVPR_2024_SALAD,
author = {Izquierdo, Sergio and Civera, Javier},
title = {Optimal Transport Aggregation for Visual Place Recognition},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2024},
}
```