# Maze-Traversing-Bot
The code to guide a bot through a maze from a live overhead camera feed
=======
We use basic computer vision and openCV based image processing to identify the maze, localise the bot in the maze, create a graph on the maze and apply Dijkstra's algorithm to find out the shortest path from start to finish.
This is a sample schematic of the maze
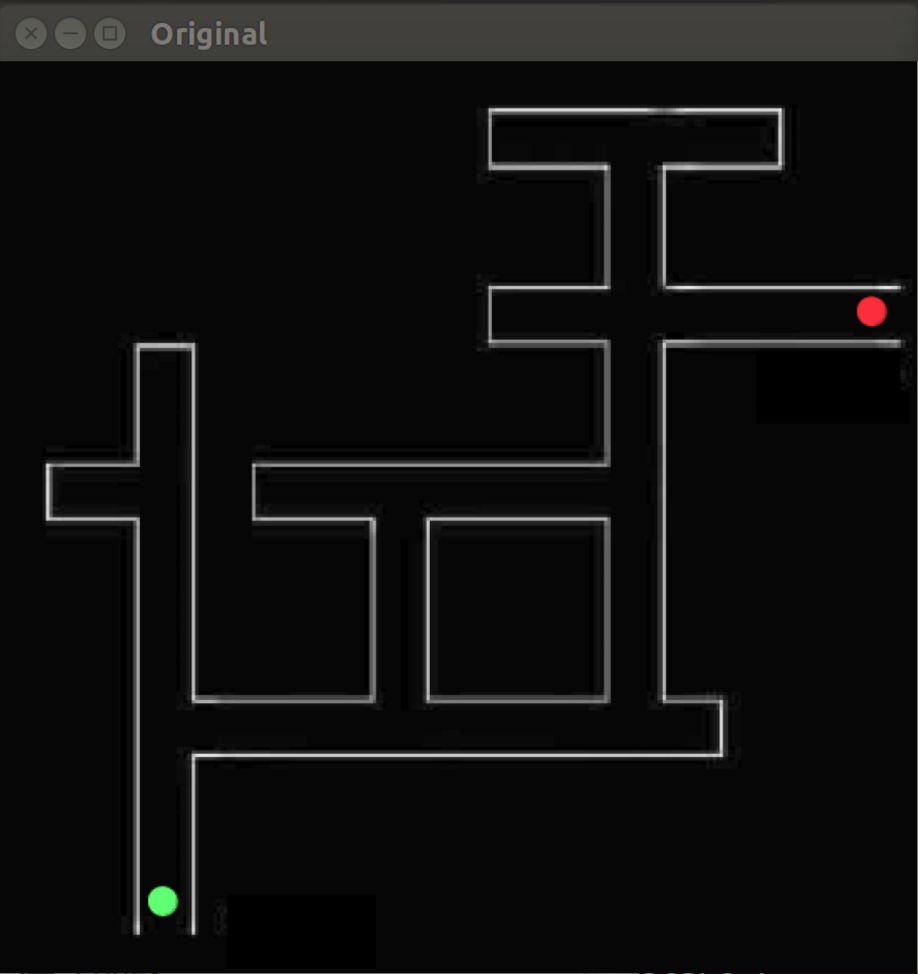
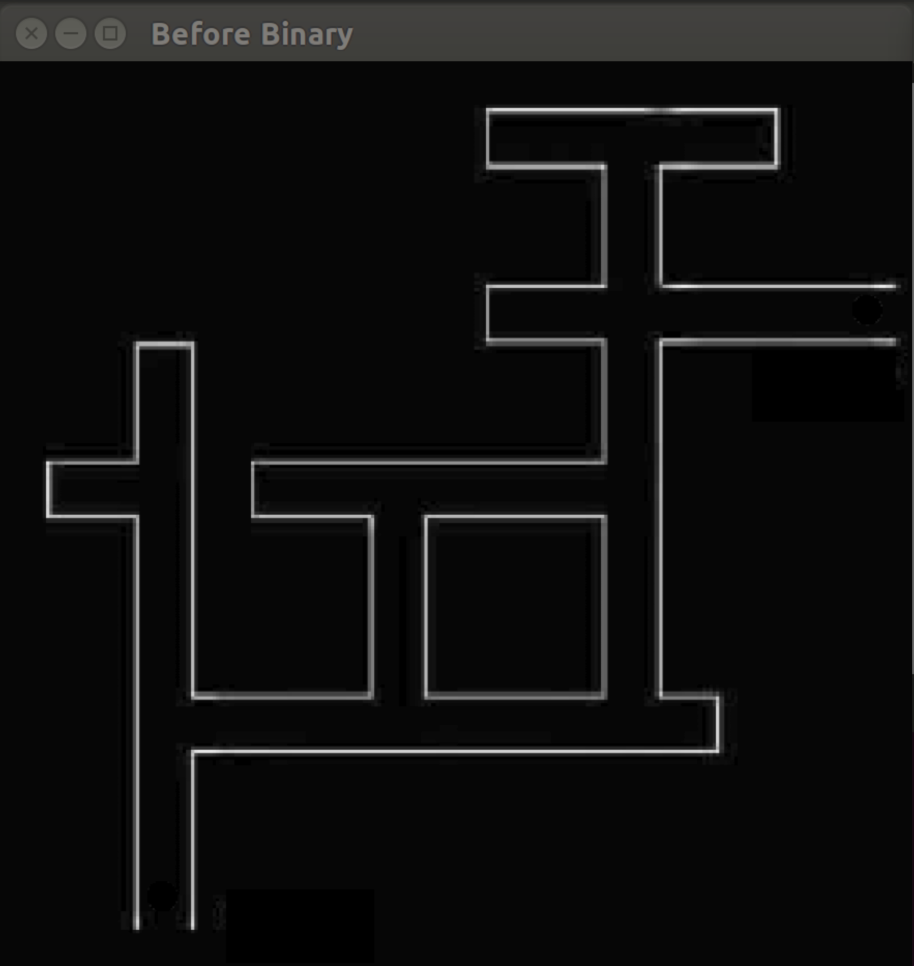
First we identify and store the locations of the start (green) and destination (red). We remove their spots, and convert the image to binary black & white.
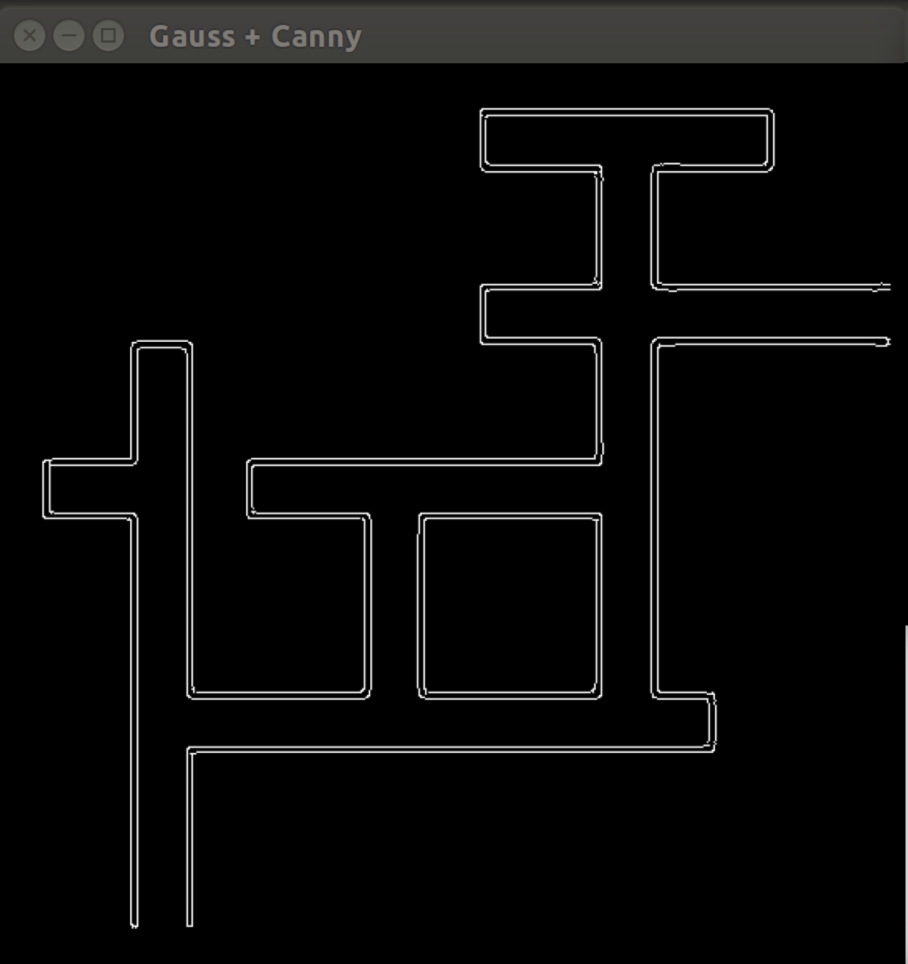
We apply Gaussian blur and Canny filter.
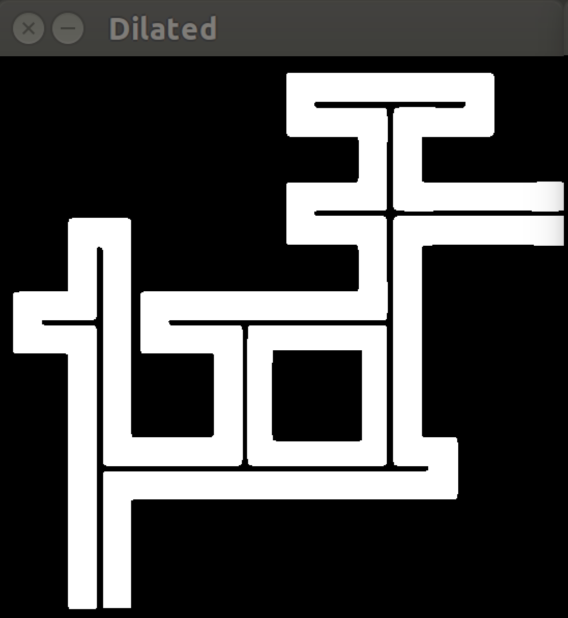
We find and draw the contours in a new image, and dilate it to make the path narrower and more precise.
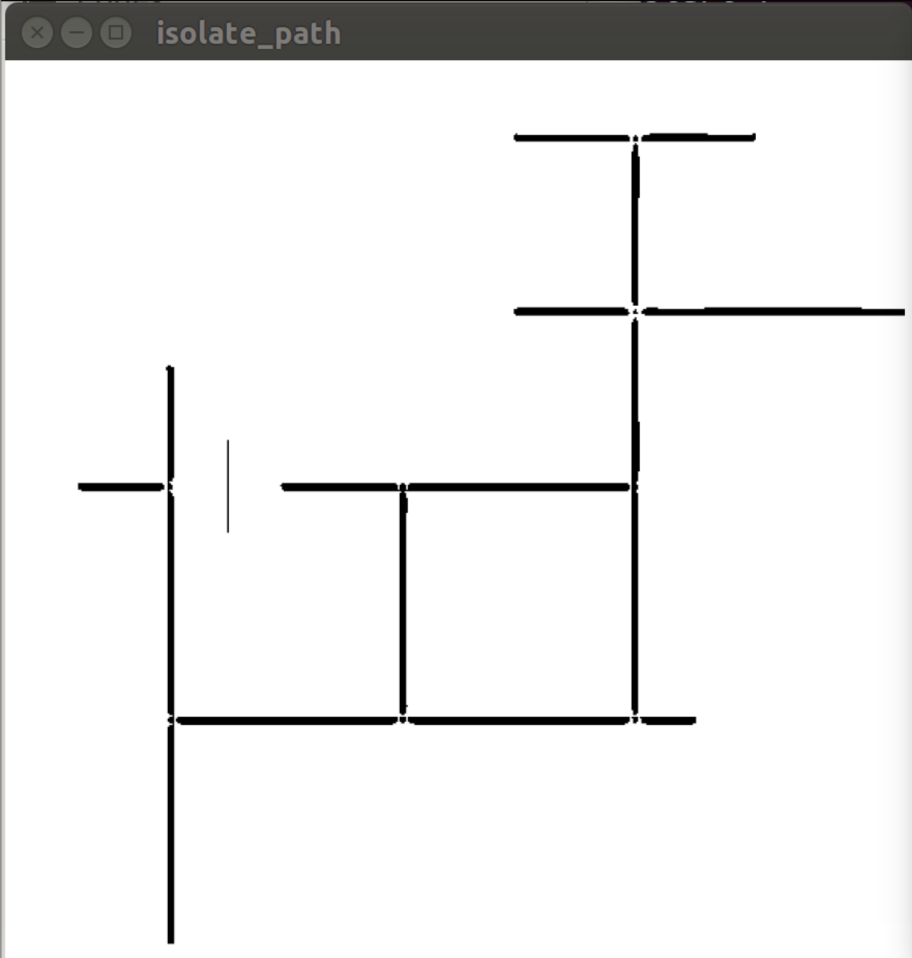
Then we isolate the actual path.
Then we apply the cornerHarris function to find the corners in the maze, which will be the vertices of our graph.
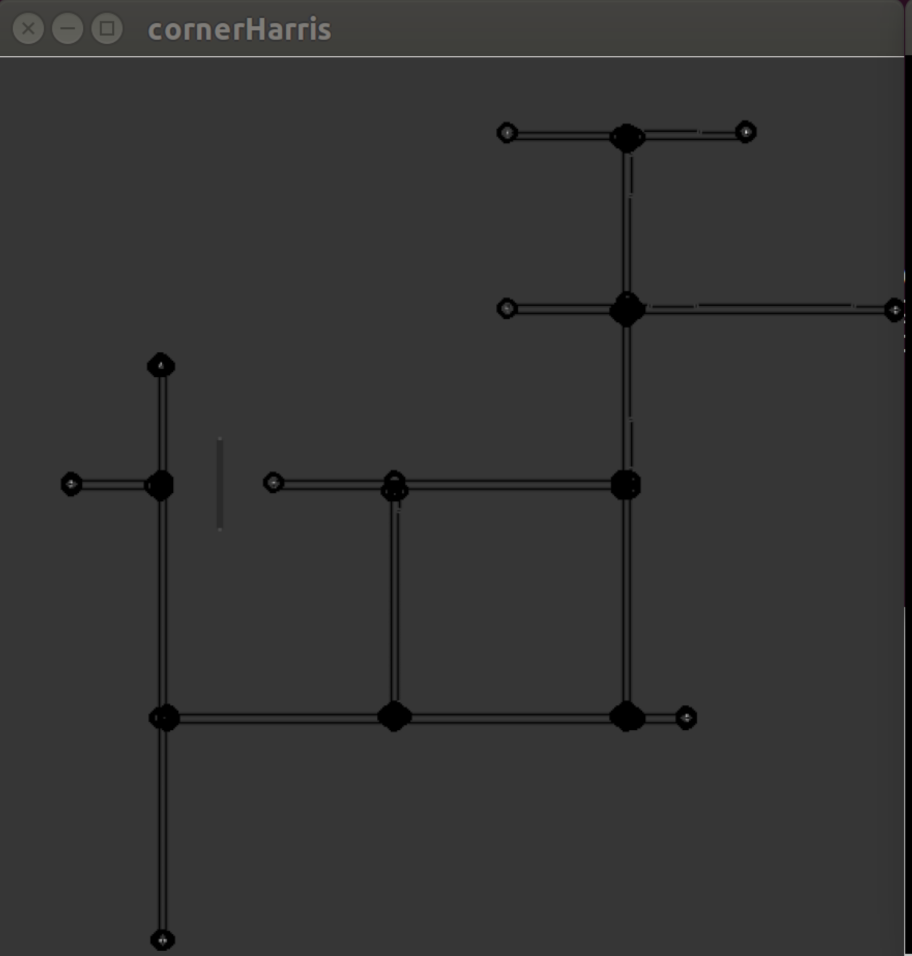
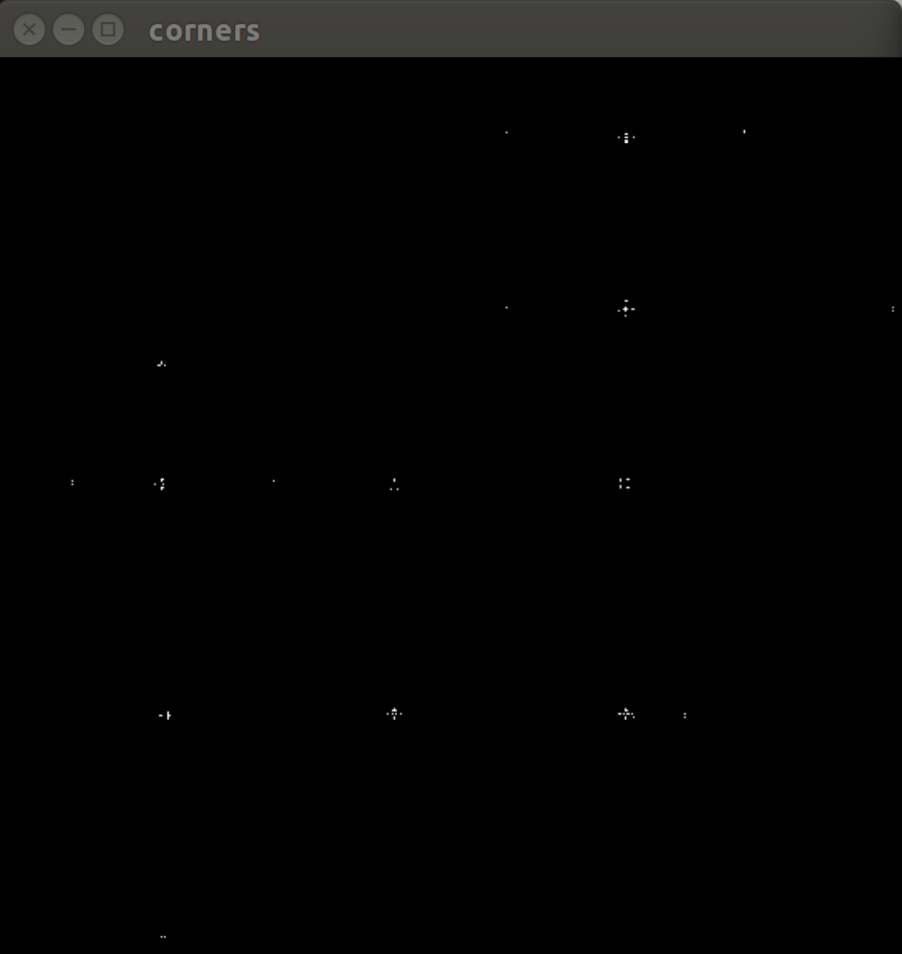
cornerHarris isn't perfect, so we refine it by cleaning up the clusters of corners detected.
Then we make a graph with these corners as vertices and make edges between vertices which don't have a wall in between in the maze.
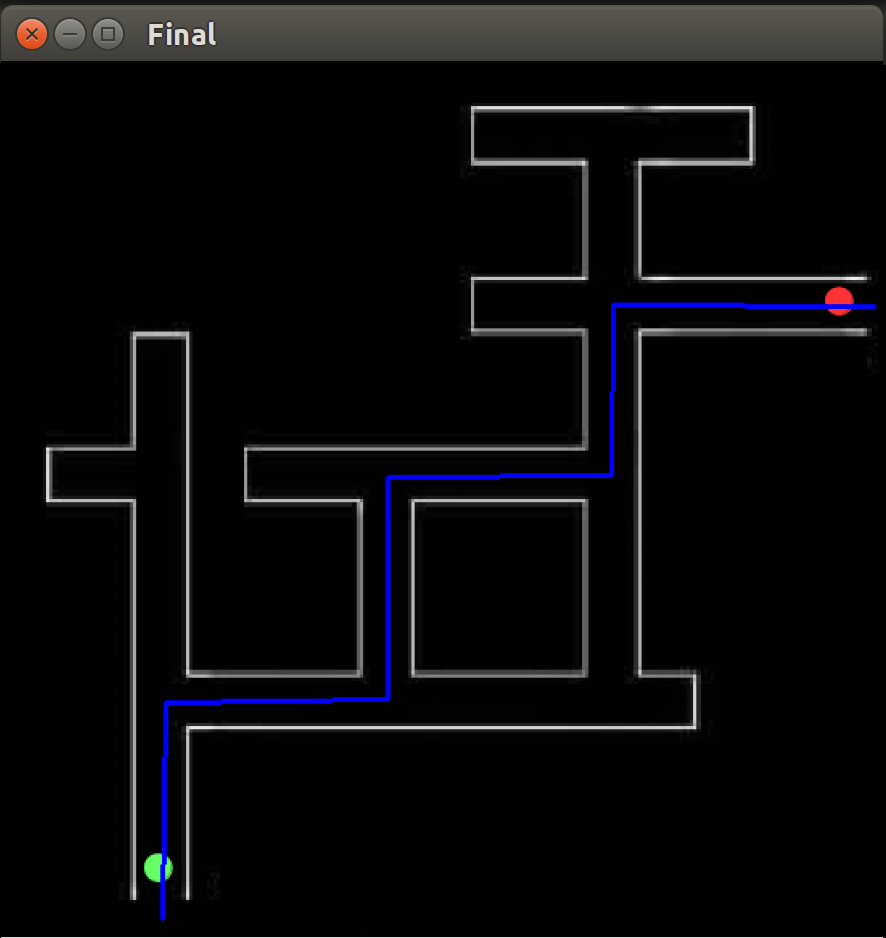
Finally, we apply Dijkstra's algorithm on this graph (using the start and destination coordinates stored in the beginning) and get the shortest path.