---
title: 'Newton''s Method for Constrained Optimization (BV Chapters 10, 11)'
subtitle: Biostat/Biomath M257
author: Dr. Hua Zhou @ UCLA
date: today
format:
html:
theme: cosmo
embed-resources: true
number-sections: true
toc: true
toc-depth: 4
toc-location: left
code-fold: false
jupyter:
jupytext:
formats: 'ipynb,qmd'
text_representation:
extension: .qmd
format_name: quarto
format_version: '1.0'
jupytext_version: 1.14.5
kernelspec:
display_name: Julia 1.9.0
language: julia
name: julia-1.9
---
We only consider convex optimization in this lecture.
## Equality constraint
* Consider equality constrained optimization
\begin{eqnarray*}
&\text{minimize}& f(\mathbf{x}) \\
&\text{subject to}& \mathbf{A} \mathbf{x} = \mathbf{b},
\end{eqnarray*}
where $f$ is convex.
### KKT condition
* The Langrangian function is
\begin{eqnarray*}
L(\mathbf{x}, \lambda) = f(\mathbf{x}) + \nu^T(\mathbf{A} \mathbf{x} - \mathbf{b}),
\end{eqnarray*}
where $\nu$ is the vector of Langrange multipliers.
* Setting the gradient of Langrangian function to zero yields the optimality condition (**Karush-Kuhn-Tucker condition**)
\begin{eqnarray*}
\mathbf{A} \mathbf{x}^\star &=& \mathbf{b} \quad \quad (\text{primal feasibility condition}) \\
\nabla f(\mathbf{x}^\star) + \mathbf{A}^T \nu^\star &=& \mathbf{0} \quad \quad (\text{dual feasibility condition})
\end{eqnarray*}
### Newton algorithm
* Let $\mathbf{x}$ be a feasible point, i.e., $\mathbf{A} \mathbf{x} = \mathbf{b}$, and denote **Newton direction** by $\Delta \mathbf{x}$. By second order Taylor expansion
\begin{eqnarray*}
f(\mathbf{x} + \Delta \mathbf{x}) \approx f(\mathbf{x}) + \nabla f(\mathbf{x})^T \Delta \mathbf{x} + \frac 12 \Delta \mathbf{x}^T \nabla^2 f(\mathbf{x}) \Delta \mathbf{x}.
\end{eqnarray*}
To maximize the quadratic approximation subject to constraint $\mathbf{A}(\mathbf{x} + \Delta \mathbf{x}) = \mathbf{b}$, we solve the KKT equation
\begin{eqnarray*}
\begin{pmatrix}
\nabla^2 f(\mathbf{x}) & \mathbf{A}^T \\
\mathbf{A} & \mathbf{0}
\end{pmatrix} \begin{pmatrix}
\Delta \mathbf{x} \\
\nu
\end{pmatrix} = \begin{pmatrix}
\, - \nabla f(\mathbf{x}) \\
\mathbf{0}
\end{pmatrix}
\end{eqnarray*}
for the Newton direction.
* When $\nabla^2 f(\mathbf{x})$ is pd and $\mathbf{A}$ has full row rank, the KKT matrix is nonsingular therefore the Newton direction is uniquely determined.
* Line search is similar to the unconstrained case.
* **Infeasible Newton step**. So far we assume that we start with a feasible point. How to derive Newton step from an infeasible point $\mathbf{x}$? Again from the KKT condition,
\begin{eqnarray*}
\begin{pmatrix}
\nabla^2 f(\mathbf{x}) & \mathbf{A}^T \\
\mathbf{A} & \mathbf{0}
\end{pmatrix} \begin{pmatrix}
\Delta \mathbf{x} \\ \omega
\end{pmatrix} = - \begin{pmatrix} \nabla f(\mathbf{x}) \\ \mathbf{A} \mathbf{x} - \mathbf{b}
\end{pmatrix}.
\end{eqnarray*}
Writing the updated dual variable $\omega = \nu + \Delta \nu$, we have the equivalent form in terms of primal update $\Delta \mathbf{x}$ and dual update $\Delta \nu$
\begin{eqnarray*}
\begin{pmatrix}
\nabla^2 f(\mathbf{x}) & \mathbf{A}^T \\
\mathbf{A} & \mathbf{0}
\end{pmatrix} \begin{pmatrix}
\Delta \mathbf{x} \\ \Delta \nu
\end{pmatrix} = - \begin{pmatrix} \nabla f(\mathbf{x}) + \mathbf{A}^T \nu \\ \mathbf{A} \mathbf{x} - \mathbf{b}
\end{pmatrix}.
\end{eqnarray*}
The righthand side is recognized as the primal and dual residuals. Therefore the infeasible Newton step is also interpreted as a **primal-dual mtehod**.
* It can be shown that the norm of the residual decreases along the Newton direction. Therefore line search is based on the norm of residual.
## Inequality constraint - interior point method
* We consider the constrained optimization
\begin{eqnarray*}
&\text{minimize}& f_0(\mathbf{x}) \\
&\text{subject to}& f_i(\mathbf{x}) \le 0, \quad i = 1,\ldots,m \\
& & \mathbf{A} \mathbf{x} = \mathbf{b},
\end{eqnarray*}
where $f_0, \ldots, f_m: \mathbb{R}^n \mapsto \mathbb{R}$ are convex and and twice continuously differentiable, and $\mathbf{A}$ has full row rank.
* We assume the problem is solvable with optimal point $\mathbf{x}^\star$ and and optimal value $f_0(\mathbf{x}^\star) = p^\star$.
* KKT condition:
\begin{eqnarray*}
\mathbf{A} \mathbf{x}^\star = \mathbf{b}, f_i(\mathbf{x}^\star) &\le& 0, i = 1,\ldots,m \quad (\text{primal feasibility}) \\
\lambda^\star &\succeq& \mathbf{0} \\
\nabla f_0(\mathbf{x}^\star) + \sum_{i=1}^m \lambda_i^\star \nabla f_i(\mathbf{x}^\star) + \mathbf{A}^T \nu^\star &=& \mathbf{0} \quad \quad \quad \quad \quad \quad (\text{dual feasibility}) \\
\lambda_i^\star f_i(\mathbf{x}^\star) &=& 0, \quad i = 1,\ldots,m.
\end{eqnarray*}
### Barrier method
* Alternative form makes inequality constraints implicit in the objective
\begin{eqnarray*}
&\text{minimize}& f_0(\mathbf{x}) + \sum_{i=1}^m I_-(f_i(\mathbf{x})) \\
&\text{subject to}& \mathbf{A} \mathbf{x} = \mathbf{b},
\end{eqnarray*}
where
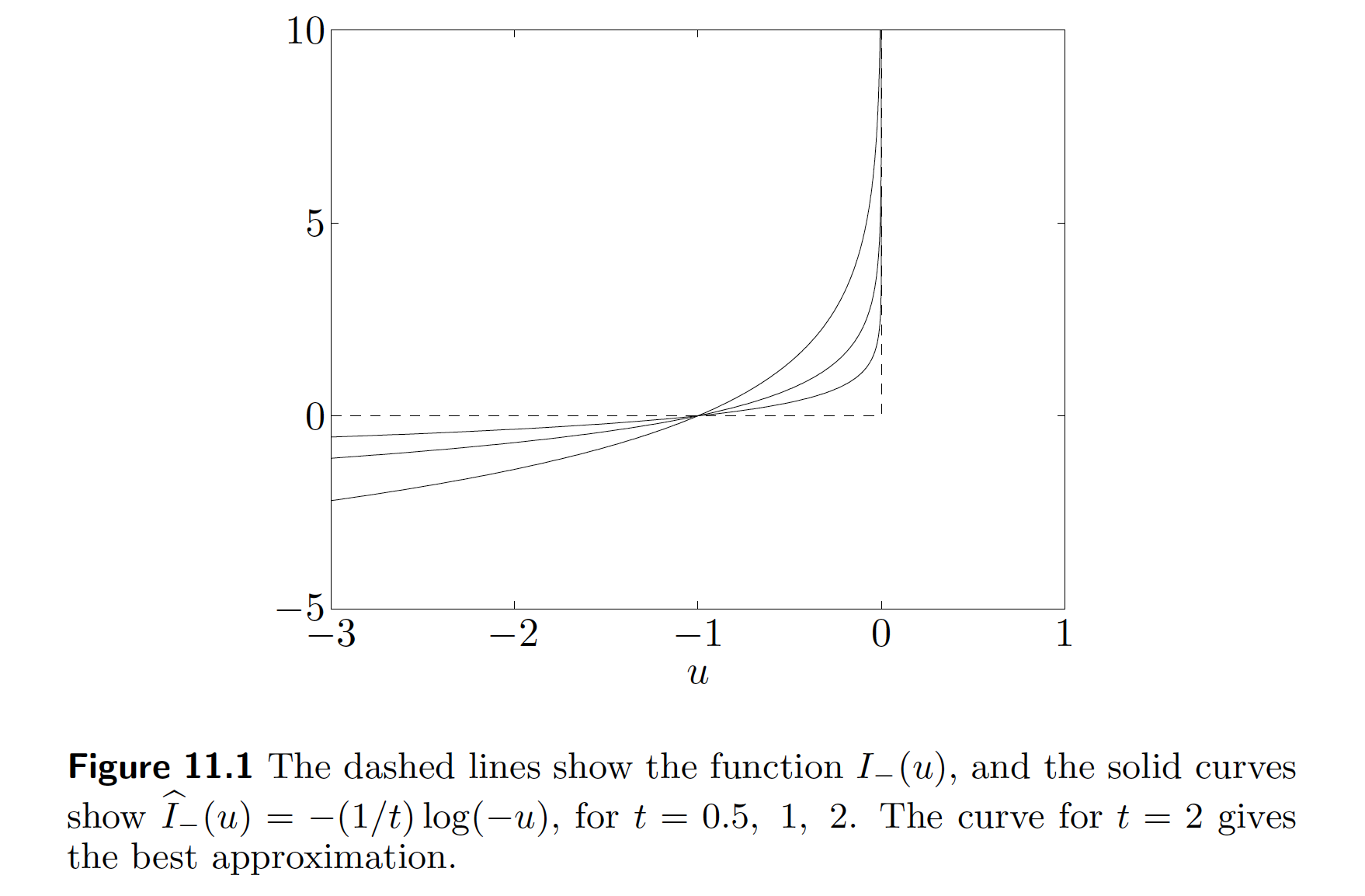
\begin{eqnarray*}
I_-(u) = \begin{cases}
0 & u \le 0 \\
\infty & u > 0
\end{cases}.
\end{eqnarray*}
* The idea of the barrier method is to approximate $I_-$ by a differentiable function
\begin{eqnarray*}
\hat I_-(u) = - (1/t) \log (-u), \quad u < 0,
\end{eqnarray*}
where $t>0$ is a parameter tuning the approximation accuracy. As $t$ increases, the approximation becomes more accurate.
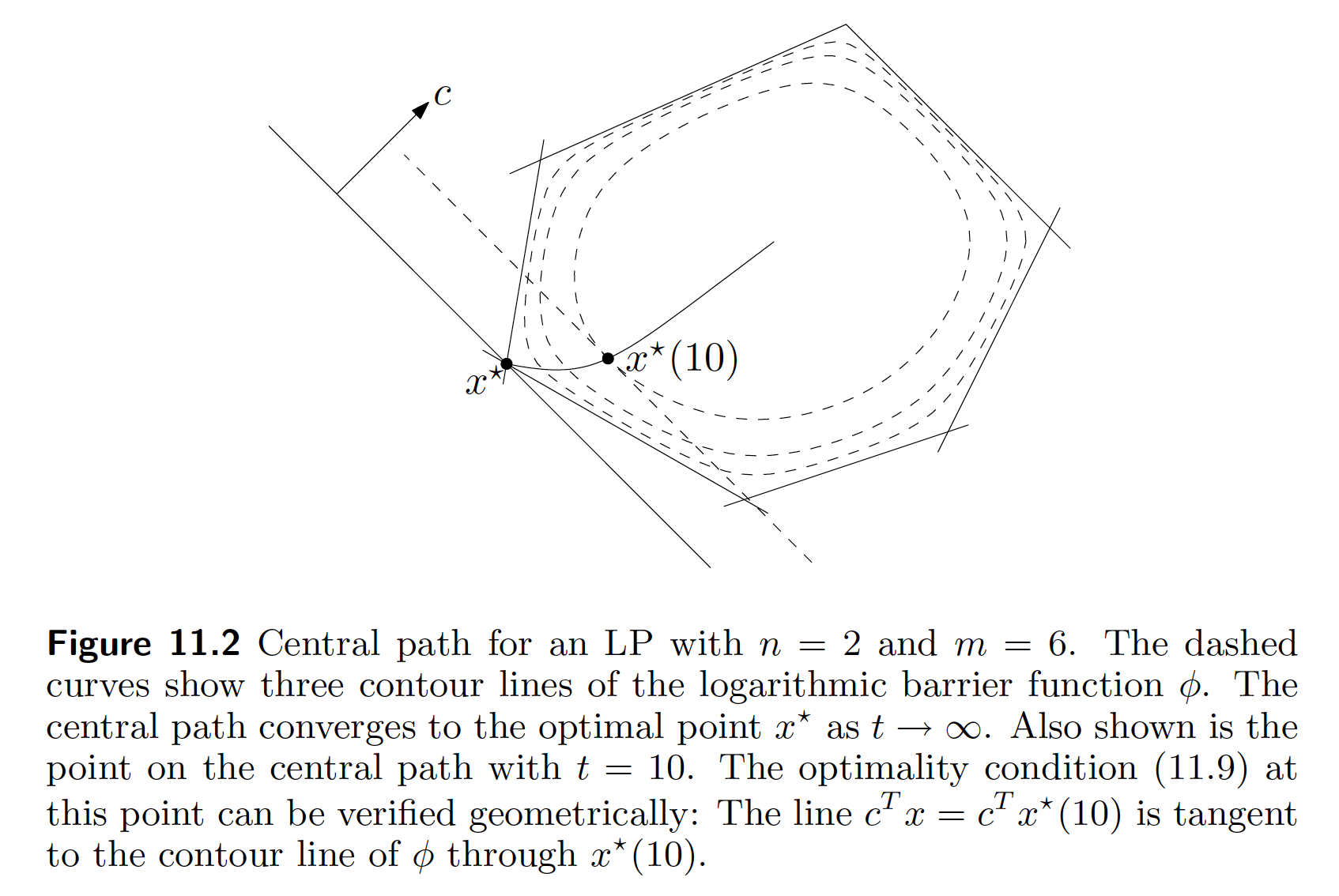
 * The **barrier method** solves a sequence of equality-constraint problems
\begin{eqnarray*}
&\text{minimize}& t f_0(\mathbf{x}) - \sum_{i=1}^m \log(-f_i(\mathbf{x})) \\
&\text{subject to}& \mathbf{A} \mathbf{x} = \mathbf{b},
\end{eqnarray*}
increasing the parameter $t$ at each step and starting each Newton minimization at the solution for the previous value of $t$.
* The function $\phi(\mathbf{x}) = - \sum_{i=1}^m \log (-f_i(\mathbf{x}))$ is called the **logarithmic barrier** or **log barrier** function.
* Denote the solution at $t$ by $\mathbf{x}^\star(t)$. Using duality theory, it can be shown
\begin{eqnarray*}
f_0(\mathbf{x}^\star(t)) - p^\star \le m / t.
\end{eqnarray*}
* The **barrier method** solves a sequence of equality-constraint problems
\begin{eqnarray*}
&\text{minimize}& t f_0(\mathbf{x}) - \sum_{i=1}^m \log(-f_i(\mathbf{x})) \\
&\text{subject to}& \mathbf{A} \mathbf{x} = \mathbf{b},
\end{eqnarray*}
increasing the parameter $t$ at each step and starting each Newton minimization at the solution for the previous value of $t$.
* The function $\phi(\mathbf{x}) = - \sum_{i=1}^m \log (-f_i(\mathbf{x}))$ is called the **logarithmic barrier** or **log barrier** function.
* Denote the solution at $t$ by $\mathbf{x}^\star(t)$. Using duality theory, it can be shown
\begin{eqnarray*}
f_0(\mathbf{x}^\star(t)) - p^\star \le m / t.
\end{eqnarray*}
 * Feasibility and phase I methods. Barrier method has to start from a **strictly feasible point**. We can find such a point by solving
\begin{eqnarray*}
&\text{minimize}& s \\
&\text{subject to}& f_i(\mathbf{x}) \le s, \quad i = 1,\ldots,m \\
& & \mathbf{A} \mathbf{x} = \mathbf{b}
\end{eqnarray*}
by the barrier method.
### Primal-dual interior-point method
* Difference from barrier method: no double loop.
* In the barrier method, it can be show that a point $\mathbf{x}$ is equal to $\mathbf{x}^\star(t)$ if and only if
\begin{eqnarray*}
\nabla f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i \nabla f_i(\mathbf{x}) + \mathbf{A}^T \nu &=& \mathbf{0} \\
\, - \lambda_i f_i(\mathbf{x}) &=& 1/t, \quad i = 1,\ldots,m \\
\mathbf{A} \mathbf{x} &=& \mathbf{b}.
\end{eqnarray*}
* We define the KKT residual
\begin{eqnarray*}
r_t(\mathbf{x}, \lambda, \nu) = \begin{pmatrix}
\nabla f_0(\mathbf{x}) + Df(\mathbf{x})^T \lambda + \mathbf{A}^T \nu \\
\, - \text{diag}(\lambda) f(\mathbf{x}) - (1/t) \mathbf{1} \\
\mathbf{A} \mathbf{x} - \mathbf{b}
\end{pmatrix} \triangleq \begin{pmatrix}
r_{\text{dual}} \\
r_{\text{cent}} \\
r_{\text{pri}}
\end{pmatrix},
\end{eqnarray*}
where
\begin{eqnarray*}
f(\mathbf{x}) = \begin{pmatrix}
f_1(\mathbf{x}) \\
\vdots \\
f_m(\mathbf{x})
\end{pmatrix}, \quad Df(\mathbf{x}) = \begin{pmatrix}
\nabla f_1(\mathbf{x})^T \\
\vdots \\
\nabla f_m(\mathbf{x})^T
\end{pmatrix}.
\end{eqnarray*}
* Denote the current point and Newton step as
\begin{eqnarray*}
\mathbf{y} = (\mathbf{x}, \lambda, \nu), \quad \Delta \mathbf{y} = (\Delta \mathbf{x}, \Delta \lambda, \Delta \nu).
\end{eqnarray*}
In view of the linear equation
\begin{eqnarray*}
r_t(\mathbf{y} + \Delta \mathbf{y}) \approx r_t(\mathbf{y}) + Dr_t(\mathbf{y}) \Delta \mathbf{y} = \mathbf{0},
\end{eqnarray*}
we solve $\Delta \mathbf{y} = - D r_t(\mathbf{y})^{-1} r_t(\mathbf{y})$, i.e.,
\begin{eqnarray*}
\begin{pmatrix}
\nabla^2 f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i \nabla^2 f_i(\mathbf{x}) & Df(\mathbf{x})^T & \mathbf{A}^T \\
\, - \text{diag}(\lambda) Df(\mathbf{x}) & - \text{diag}(f(\mathbf{x})) & \mathbf{0} \\
\mathbf{A} & \mathbf{0} & \mathbf{0}
\end{pmatrix} \begin{pmatrix}
\Delta \mathbf{x} \\
\Delta \lambda \\
\Delta \nu
\end{pmatrix} = - \begin{pmatrix}
r_{\text{dual}} \\
r_{\text{cent}} \\
r_{\text{pri}}
\end{pmatrix}
\end{eqnarray*}
for the **primal-dual search direction**.
* Feasibility and phase I methods. Barrier method has to start from a **strictly feasible point**. We can find such a point by solving
\begin{eqnarray*}
&\text{minimize}& s \\
&\text{subject to}& f_i(\mathbf{x}) \le s, \quad i = 1,\ldots,m \\
& & \mathbf{A} \mathbf{x} = \mathbf{b}
\end{eqnarray*}
by the barrier method.
### Primal-dual interior-point method
* Difference from barrier method: no double loop.
* In the barrier method, it can be show that a point $\mathbf{x}$ is equal to $\mathbf{x}^\star(t)$ if and only if
\begin{eqnarray*}
\nabla f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i \nabla f_i(\mathbf{x}) + \mathbf{A}^T \nu &=& \mathbf{0} \\
\, - \lambda_i f_i(\mathbf{x}) &=& 1/t, \quad i = 1,\ldots,m \\
\mathbf{A} \mathbf{x} &=& \mathbf{b}.
\end{eqnarray*}
* We define the KKT residual
\begin{eqnarray*}
r_t(\mathbf{x}, \lambda, \nu) = \begin{pmatrix}
\nabla f_0(\mathbf{x}) + Df(\mathbf{x})^T \lambda + \mathbf{A}^T \nu \\
\, - \text{diag}(\lambda) f(\mathbf{x}) - (1/t) \mathbf{1} \\
\mathbf{A} \mathbf{x} - \mathbf{b}
\end{pmatrix} \triangleq \begin{pmatrix}
r_{\text{dual}} \\
r_{\text{cent}} \\
r_{\text{pri}}
\end{pmatrix},
\end{eqnarray*}
where
\begin{eqnarray*}
f(\mathbf{x}) = \begin{pmatrix}
f_1(\mathbf{x}) \\
\vdots \\
f_m(\mathbf{x})
\end{pmatrix}, \quad Df(\mathbf{x}) = \begin{pmatrix}
\nabla f_1(\mathbf{x})^T \\
\vdots \\
\nabla f_m(\mathbf{x})^T
\end{pmatrix}.
\end{eqnarray*}
* Denote the current point and Newton step as
\begin{eqnarray*}
\mathbf{y} = (\mathbf{x}, \lambda, \nu), \quad \Delta \mathbf{y} = (\Delta \mathbf{x}, \Delta \lambda, \Delta \nu).
\end{eqnarray*}
In view of the linear equation
\begin{eqnarray*}
r_t(\mathbf{y} + \Delta \mathbf{y}) \approx r_t(\mathbf{y}) + Dr_t(\mathbf{y}) \Delta \mathbf{y} = \mathbf{0},
\end{eqnarray*}
we solve $\Delta \mathbf{y} = - D r_t(\mathbf{y})^{-1} r_t(\mathbf{y})$, i.e.,
\begin{eqnarray*}
\begin{pmatrix}
\nabla^2 f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i \nabla^2 f_i(\mathbf{x}) & Df(\mathbf{x})^T & \mathbf{A}^T \\
\, - \text{diag}(\lambda) Df(\mathbf{x}) & - \text{diag}(f(\mathbf{x})) & \mathbf{0} \\
\mathbf{A} & \mathbf{0} & \mathbf{0}
\end{pmatrix} \begin{pmatrix}
\Delta \mathbf{x} \\
\Delta \lambda \\
\Delta \nu
\end{pmatrix} = - \begin{pmatrix}
r_{\text{dual}} \\
r_{\text{cent}} \\
r_{\text{pri}}
\end{pmatrix}
\end{eqnarray*}
for the **primal-dual search direction**.