An implementation and evaluation of large-scale multi-user human-robot collaboration with head-mounted augmented reality
Venue. Advanced Engineering Informatics (2025)
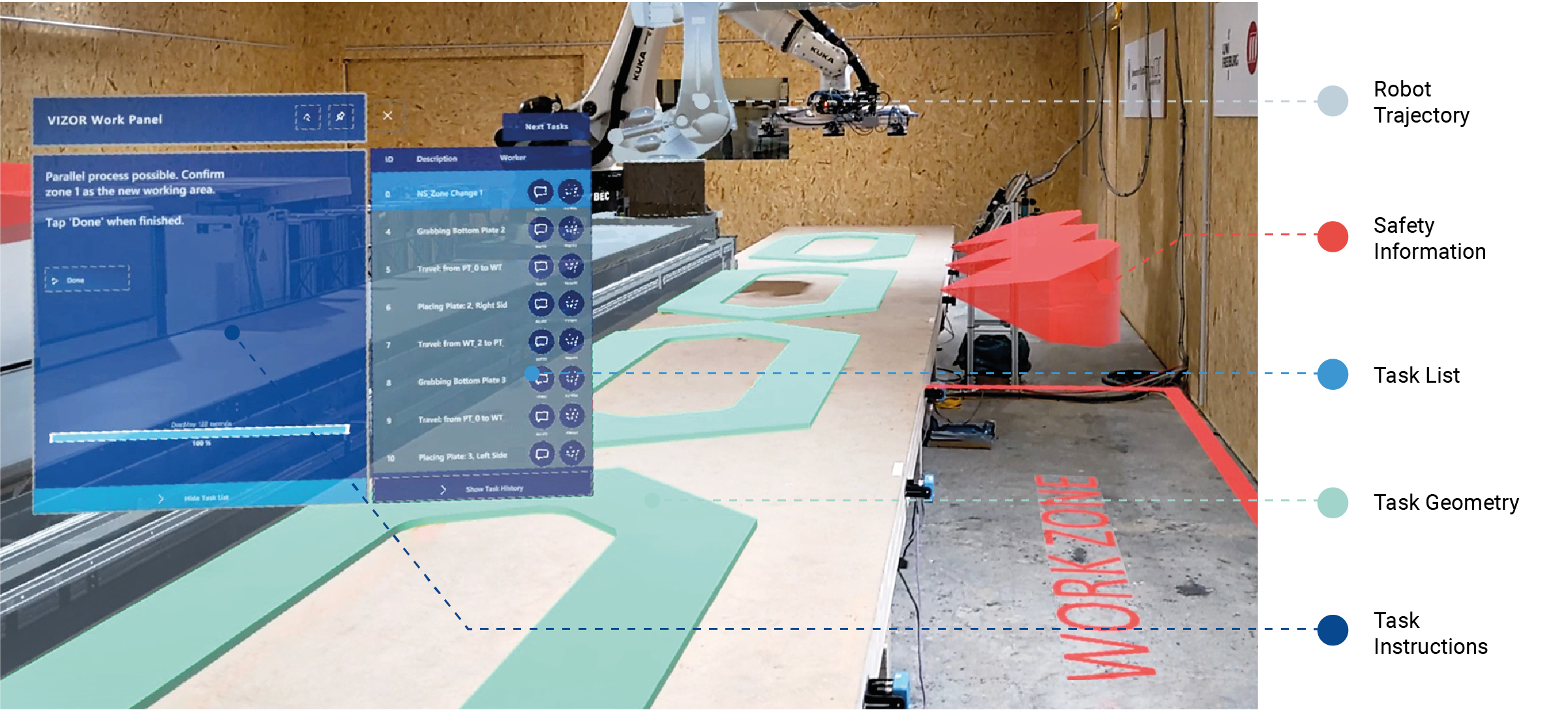
Abstract. Human-robot collaboration (HRC) offers promising potential for more flexible and sustainable production practices in architecture and construction. This requires HRC setups to scale up from light-payload collaborative robots to conform with the scale of building construction while considering the safety and teamwork culture for workers. This research proposes a system for large-scale multi-user HRC using head-mounted augmented reality (AR) devices. To achieve this, we contribute three methods that work in conjunction: (1) an AR system that enables multiple users to share tasks and work together with robots; (2) a dynamic human task allocation engine that reacts to the changing production teams and task types; and (3) a safety zone generation and allocation method to configure human collaboration in shared space with large-scale robots. The system is evaluated using a case study of prefabricated timber cassettes combining discrete event simulations, a user study and a fabrication process demonstrator with an industry partner.
Link to this page: