FUTURE PROJECTS

Upcoming
Ever wondered what goes inside the core of a hyped space expedition program. We always chatter about reaching out to a planet ; but once landed then what? With this curiosity blinking in our mind we at Robotics club IIT Guwahati have endeavored to rekindle this beauty through "YUVAAN".ACADEMIC YEAR 2021

Ongoing
Mentor: Devesh Gupta
We have made a pair of glasses that will do more than just correct your vision.
Ongoing
Mentor: Yash Joshi
We will design an IC engine operated small scale bot. Phase one of the project will be Aimed at Designing an RC operated Engine car. This will get you acquainted with the type of work required for a bigger next phase. Phase 2 will be more unique to us and focused on the transmission part (also known as the drive module of a vehicle which basically transfers the power from engine to wheels.)
Ongoing
Mentor: Saranyaa Thiagarajan
An exoskeleton is a wearable electromechanical structure that is intended to resemble and allow movements in a manner similar to the human skeletal system. You can think of it like a miniature Iron man suit. The project is about creating an assistive exoskeleton for the shoulders.
Ongoing
Mentor: Sree Rakhi Kudipudi
FiDo is an all-terrain bot that can roll on any surface due to its wheel-like shape and can go anywhere within its wireless range controlled by the joystick. It has many applications for security, surveillance purposes as it can camouflage with its environment and can act as your assistant too.
Ongoing
Mentor: Nahush Bhamre
This project aims to make an autonomous bot that will act as a boat and will collect trash or waste floating on the surface of water bodies.
Ongoing
Mentor: Shreya Singh
The gas pipeline is subjected to periodic inspection and maintenance. Earlier, this was carried out manually. But nowadays, it can be easily done by a pipe traversing bot which can travel through these pipes, inspect and send the results periodically, so that we can reach directly to the damaged pipe location without disturbing the other pipes. They can even travel to the pipe where it is difficult for a human to reach. They can be even trained to repair the defect which in turn saves money, time, and labor.
Ongoing
Mentor: Ritesh Ranjan & Sanjana Reddy Kalsani
With the advancement of technology, the need for automation is increasing exponentially. From industry to home appliances and from assisting doctors to use in research, robotic arm plays an important role. We are going to make a robotic arm with 6 degrees of freedom. It will have the ability to fold in a little space.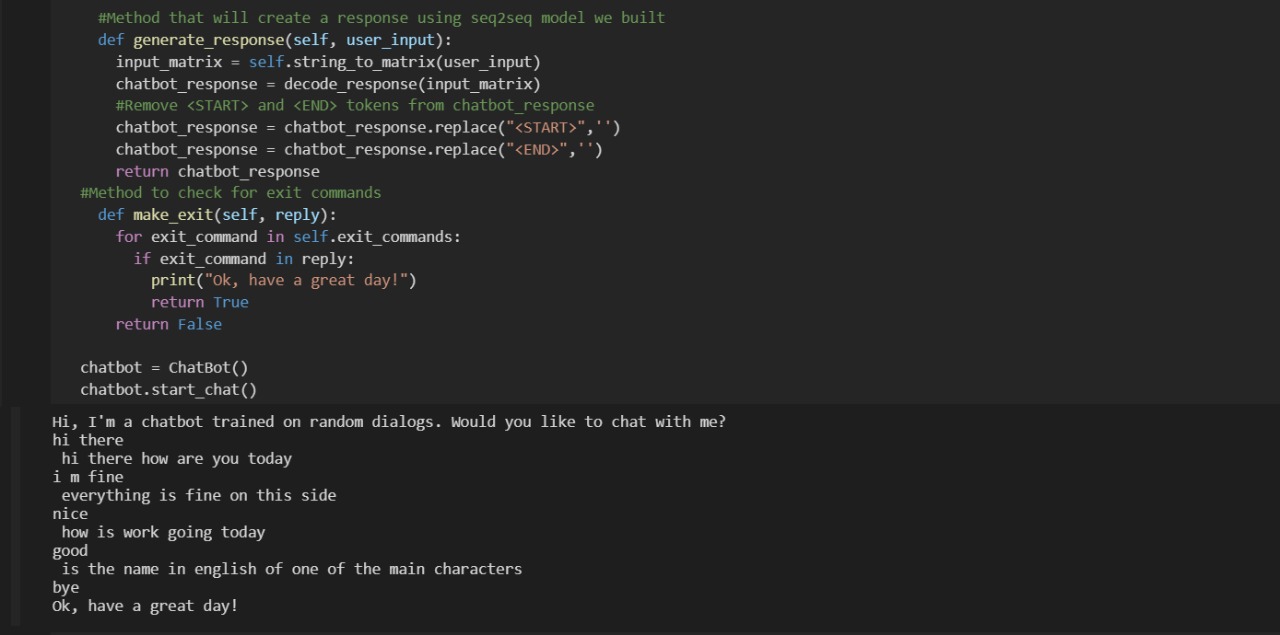
Ongoing
Mentor: Rahul Aggarwal
In this project, we have built a voice recognition chatbot using sequence model and Natural Language Programming. Inspired from Amazon Alexa and apple Siri.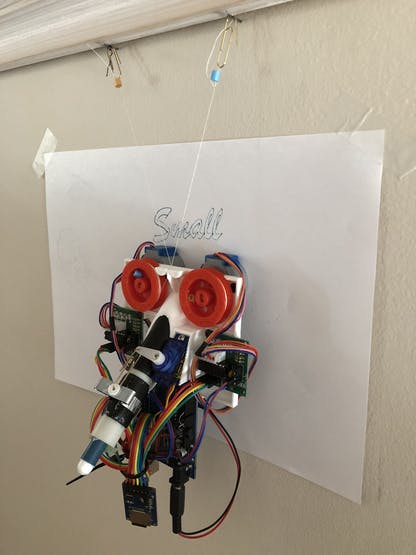
Ongoing
Mentor: Varshith Kancharla
In this project we will be taking an image as an input and then, according to the image, will control the path of the drawing part (pen) and draw it on the wall.INTER IIT TECH MEET 9.0
First Position
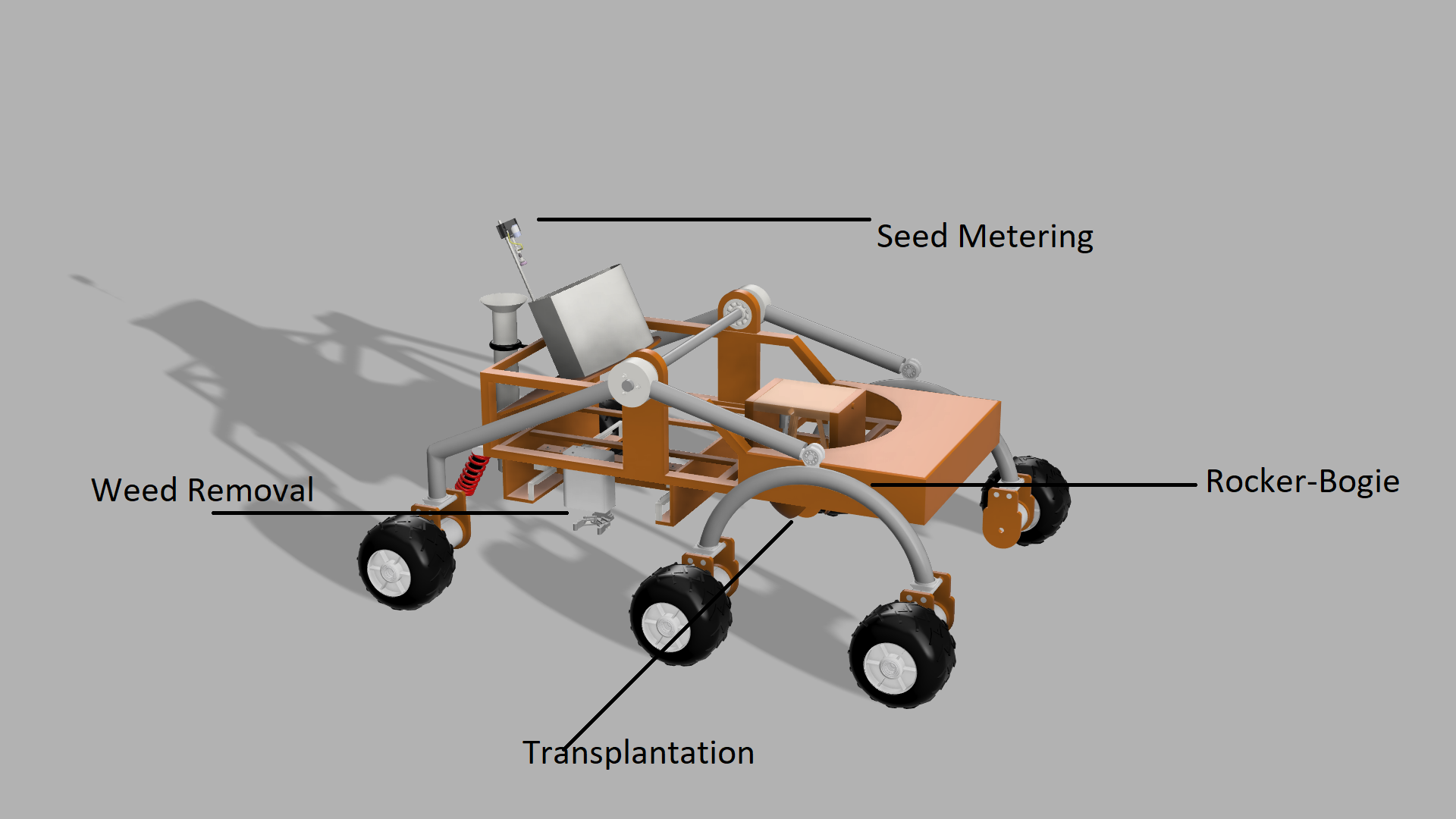
• The bot will use a rocker boggie mechanism because it is feasible for all terrains. • A small vacuum pump will be used to pickup individual seed. • A general tree spade has three or four blades that encircle the tree, dig into the ground, and lift the entire tree, including its roots and soil (which is collectively known as a "root ball"), out of the earth and transplanting tree as the whole in a desired location. • At the bottom of the bot, a rectangular frame will be established that will be operated using a combination of sliders and rack and pinion. The weed will be identified using a camera.TECHEVINCE 7.0
Completed
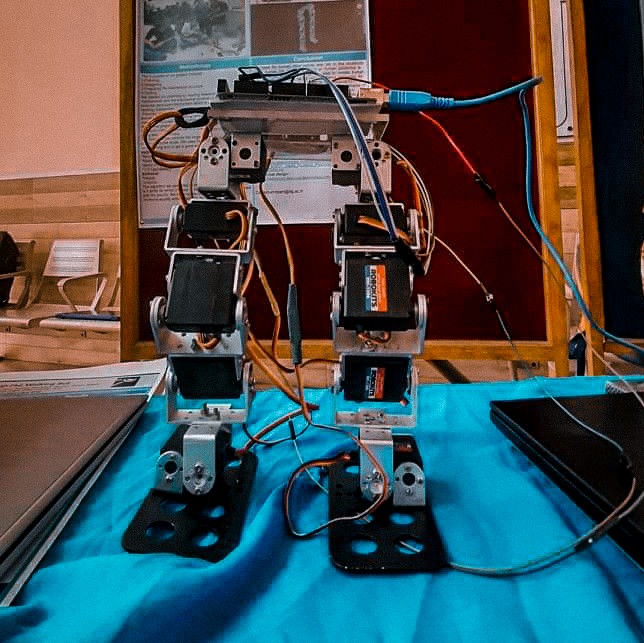
An machine that usually moves in a bipedal manner is known as a biped, meaning "two feet". Our project BIPED has 10 Degree of Freedom is a bot designed to walk in flat surfaces.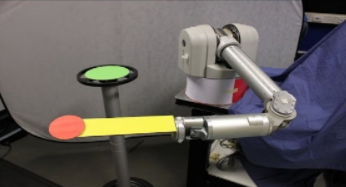
Completed
The main focus of the project is to design a planar robotic arm that can resemble a human hand and can do all the work which can be done in a plane. It can write according to pattern drawn on screen, travel a set path, pick and place objects.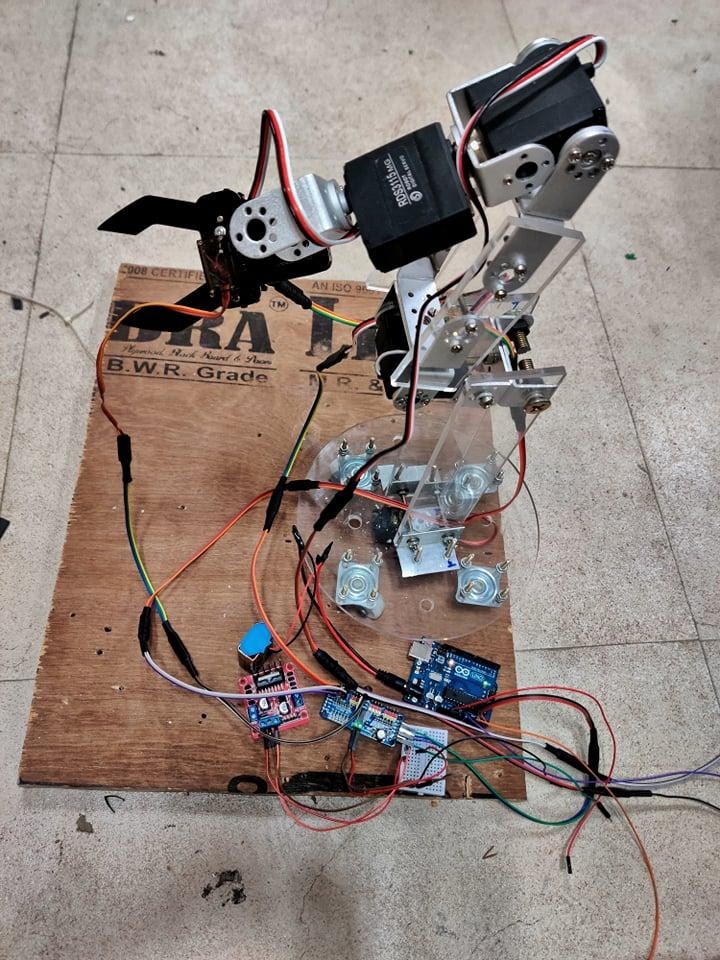
Completed
This is a Replication Robot which shows the replication of motion of robots using simple structures. This project is meant to designing and developing of a microcontroller (ATmega) based robotic arm and a replica for it’s movement.
Completed
Perhaps you have never been gifted at drawing, or you don’t have time to do it yourself, so why not let a simple 2-D Robotic arm draw for you. This simple two axis device can accurately move a pen to draw out anything.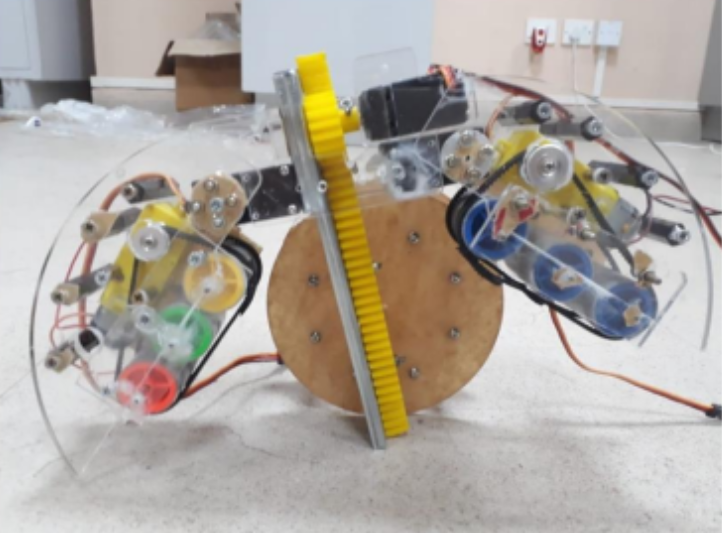
Completed
Our project was inspired by DARPA’s shapeshifting wheel – a wheel that can change its shape adapting the terrain, making it an all-terrain traveling vehicle.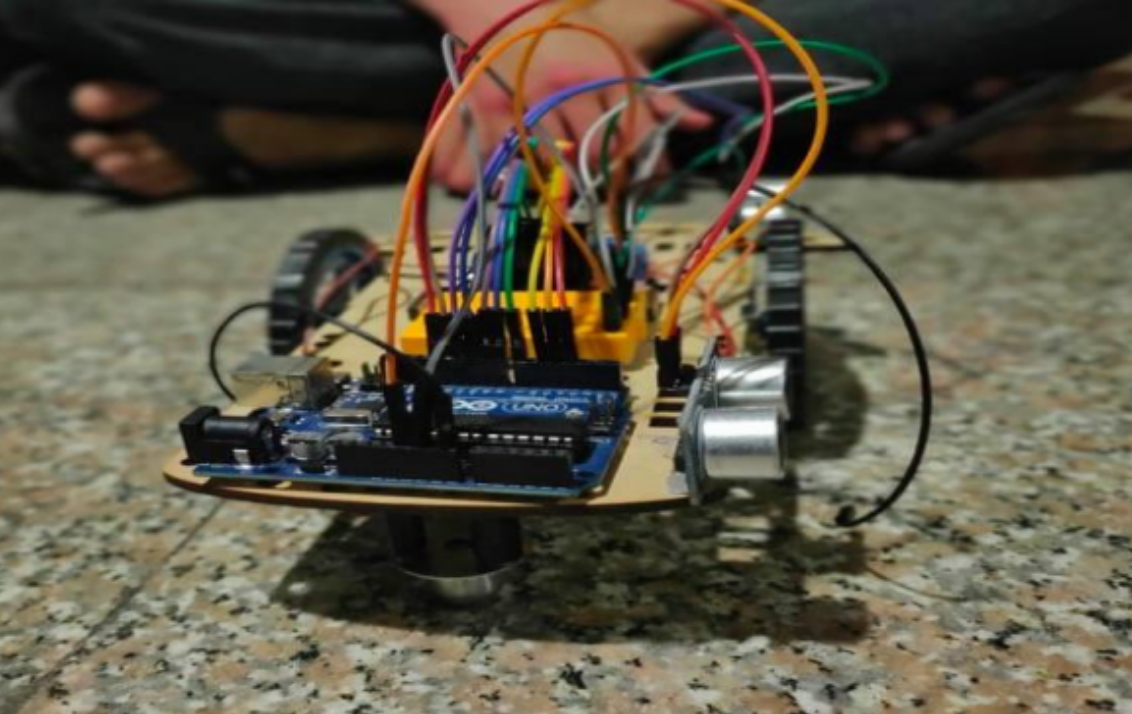
Completed
Wall follower is a arduino based robot which follows a straight path at a fixed distance from the wall.
Completed
We developed a fully autonomous bot which goes to its targeted object (with obstacles on its way), lifts the object and then takes it to the desired location. Our target was to automate warehouse inventory management.TECHEVINCE 6.0
Completed
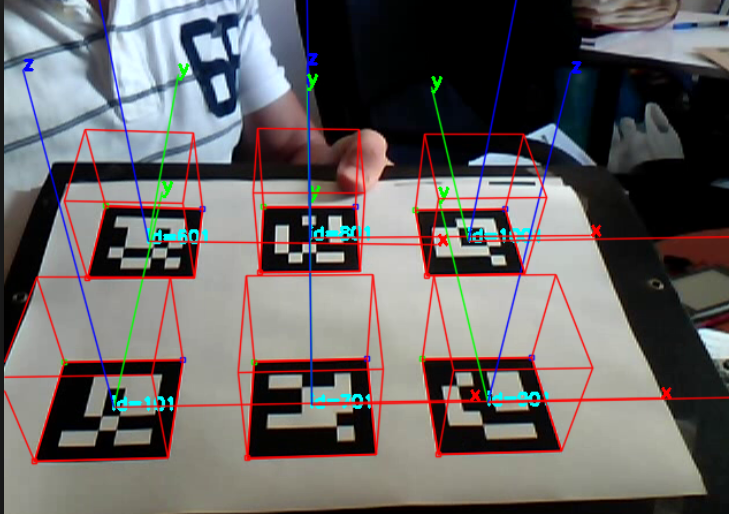
Augmented reality (AR) is a technology that allows the enhancement of the real world with a computer generated virtual world. This virtual world can be simple or complex, and can contain sounds, images and even interactive virtual objects that appear to be real.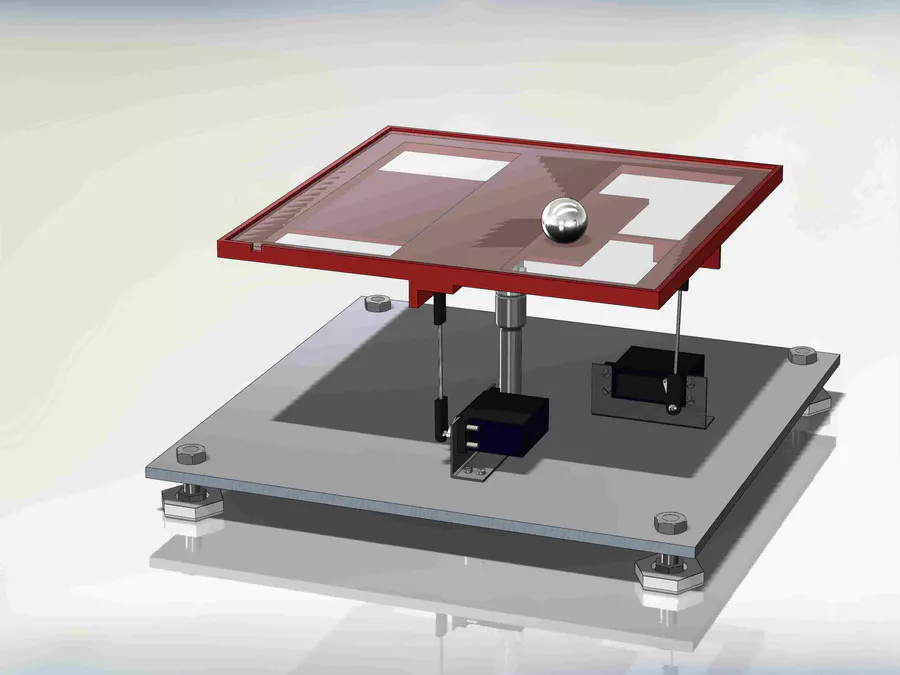
Completed
The goal of this project is to effectively control a weighted ball on a flat surface. The entire project is built around using a PID method to properly move the ball to the setpoint.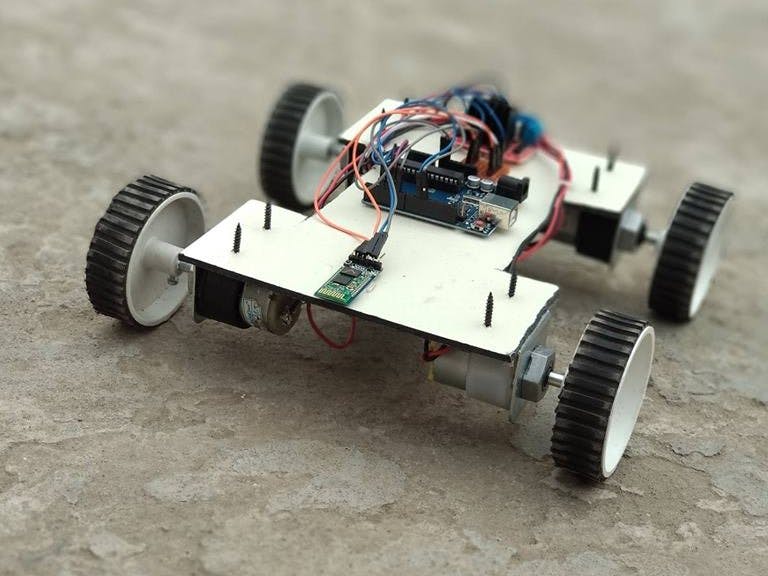
Completed
In this project we have used cheap sensors to track the source of sound, interpret a sound source, calculate the data and exhibit the correct output to the motors, with the help of Voice Recognition Module, so that a vehicle can steer and go to the position of the sound source.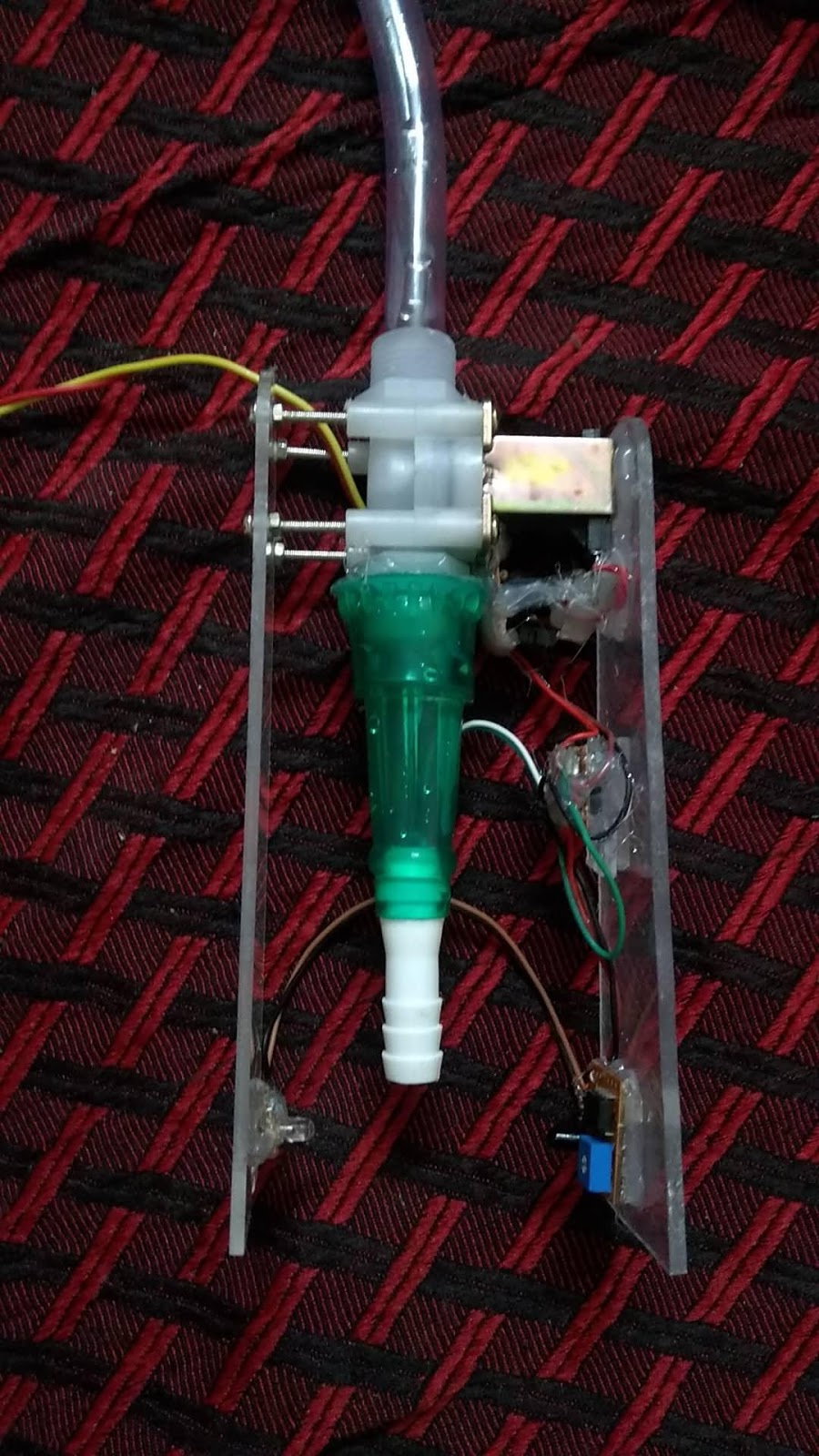
Completed
We looked into the simple, everyday task of filling the water bottles and realised that a task this simple and frequent, still isn’t as easy and efficient as it should have been. The number of steps involved to have this task done can be reduced with help of technology and innovation.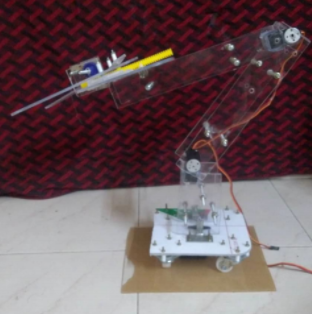
Completed
This project features a 4R arm coupled with a vision system and a control system which aims at solving two major problems : Sorting and Rearranging.The vision system aims at detecting and classifying objects, allowing the arm to avoid obstacles, identify targets and do motion planning. The control system allows the arm to plan trajectories while maintaining greater accuracy.
Completed
This is a Rubik’s cube solving robot which scans the cube and solves the cube by rotating the faces with stepper motors. The setup is made of acrylic , there are 4 pillars on a base with stepper motors attached to it.
Completed
The bot is moving on its six wheels powered by high torque DC motors which enables it to climb up the stair with an ease. The bot is equipped with a self adjusting plate on its top(just like a camera gimbal) which helps to keep the load always in horizontal position. The rear arms are rigid while the front arm (basically an elbow joint) is flexible and free to rotate about a horizontal axis thus enabling the front part to get lifted up whenever it encounter a stair. The bot is manually controlled by node MCU.INTER IIT TECH MEET 8.0
Second Position
The motivation for the project is to decrease farming costs and increase productivity in terrace farming. The aim is to develop a lightweight robot that can climb up and down through the steep steps of the terrace farm and simultaneously produce a reliable navigation plan of the robot for autonomous navigation in the field to execute farming operations such as plowing, seeding, watering, and harvesting. A machine-based farming systems by autonomous bot is one possible solution to overcome these issues of terrace farming efficiently.TECHEVINCE 5.0
Completed
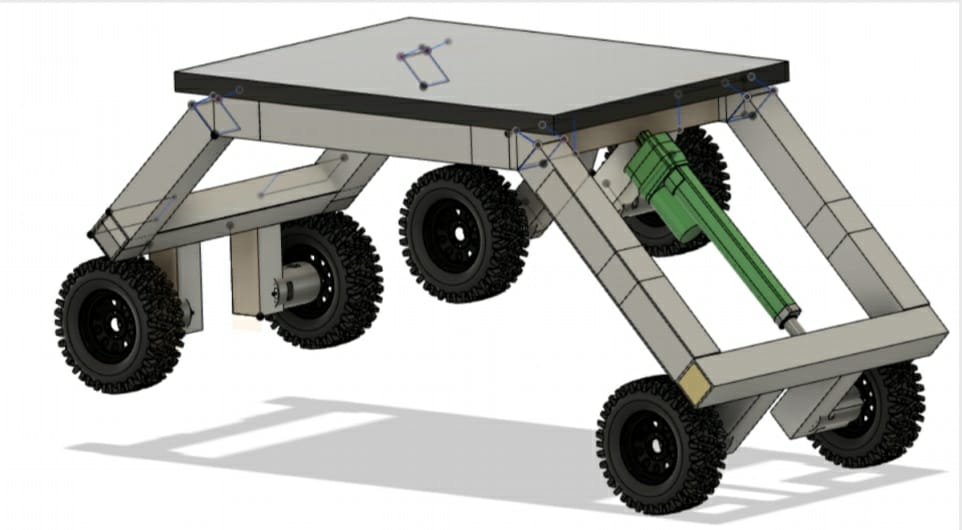
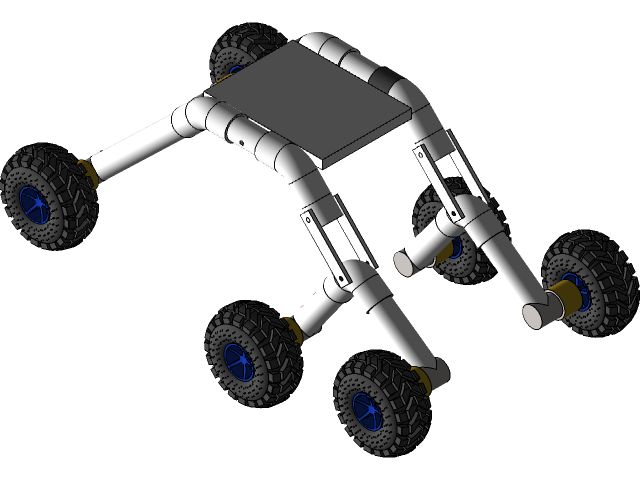
Rocker bogie mechanism is a mechanism primarily used in the mars rovers to overcome the rough terrains while maintaining stability. It consists of two arms with wheel mounted to each. Both arms are connected through a movable joint. This enables to have a suspension based mechanism that distributes the vehicle load as evenly as possible even on bumps and irregular surfaces.
Completed
This project uses face recognition technology to record attendance.
Completed
We are using simple lock and key mechanism controlled by Bluetooth. We are controlling the key using servo motors whose circuits are controlled by Arduino Micro. We send a signal using the app which instructs the lock to open by rotating the key which is fixed in the lock and the entire system is inside the box.INTER IIT TECH MEET 7.0
Inter IIT Tech Meet
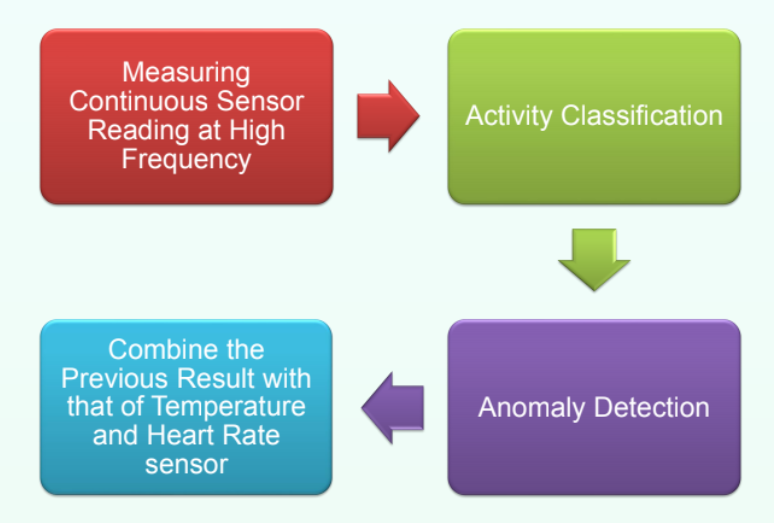
• We have a suit with working sensors which can be worn by anyone. • Soldier wear the suit and train data on it for a week or two. • Now the suit can detect all the motion of the soldier and transmit the same to the base station for real-time tracking of motion.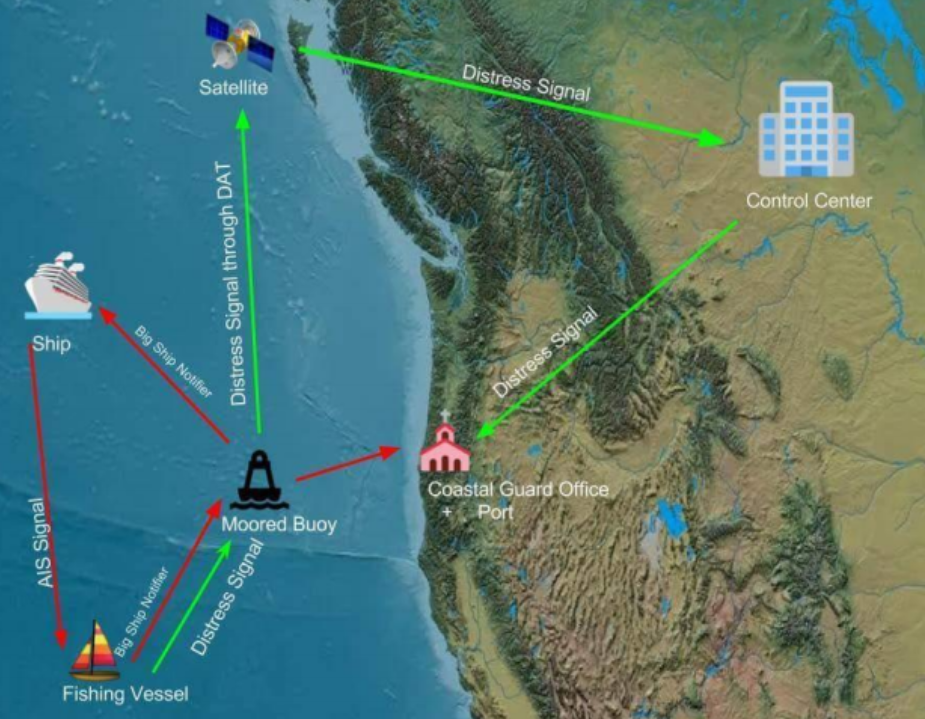
TECHEVINCE 4.0
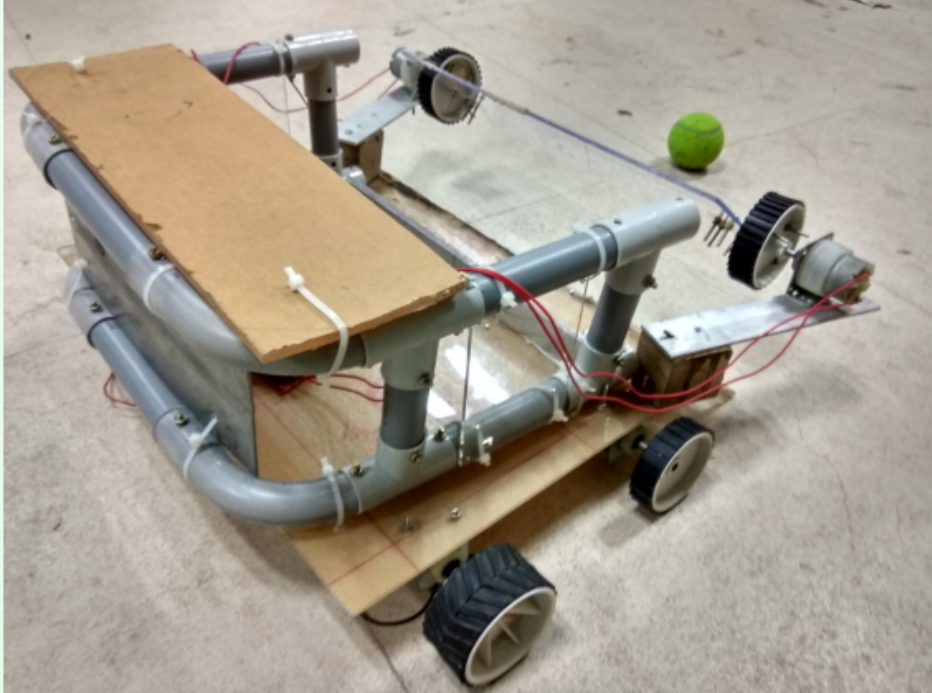
TRUE TENNIS BUDDY !!
An automated ball collector which once placed
in the field would reduce your boring burden of
picking the ball .

Completed
We wanted to create our very own biped robot. This project is to make use of Robotics Operating System to control a biped robot using joystick.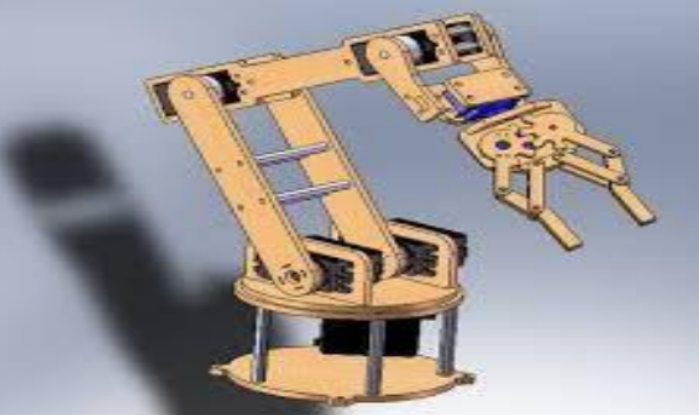
Completed
The Arm can locate coloured balls in the space and then grab them automatically.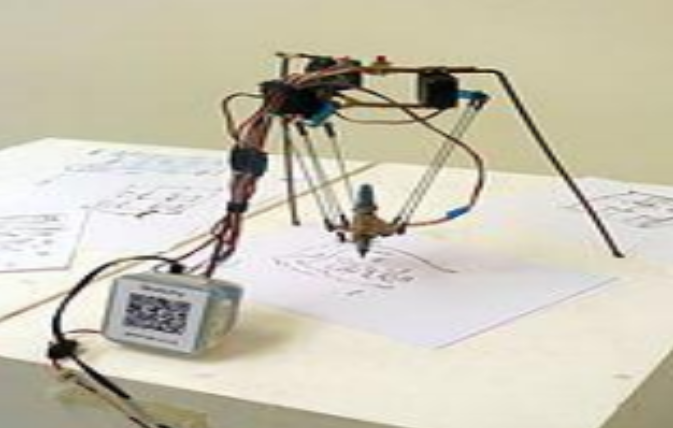
Completed
A delta robot is a type of parallel robot. It consists of three arms connected to universal joints at the base. The key design feature is the use of parallelograms in the arms, which maintains the orientation of the end effector. By contrast, a Stewart platform can change the orientation of its end effector. Delta robots have popular usage in picking and packaging in factories because they can be quite fast, some executing up to 300 picks per minute.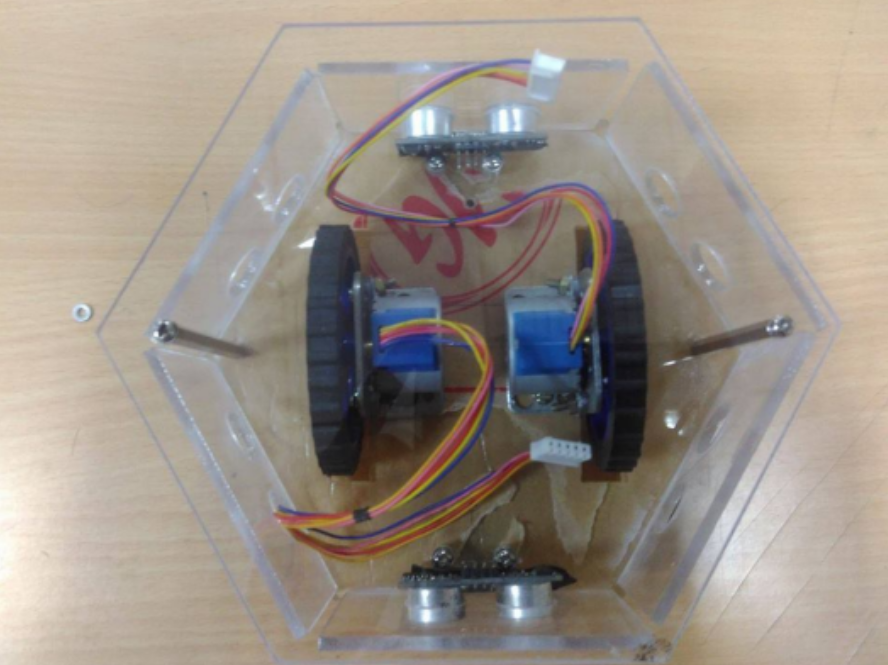
Completed
With all the buzz going around the autonoumous swarm systems, we decided to make one of our own at IIT Guwahati. Hive is the first prototype of our autonomous intelligent multirobot system. It’s capabilities are only limited by our imagination.
Completed
A Mobile Printer is a mobile robot that writes the letters and words by moving around.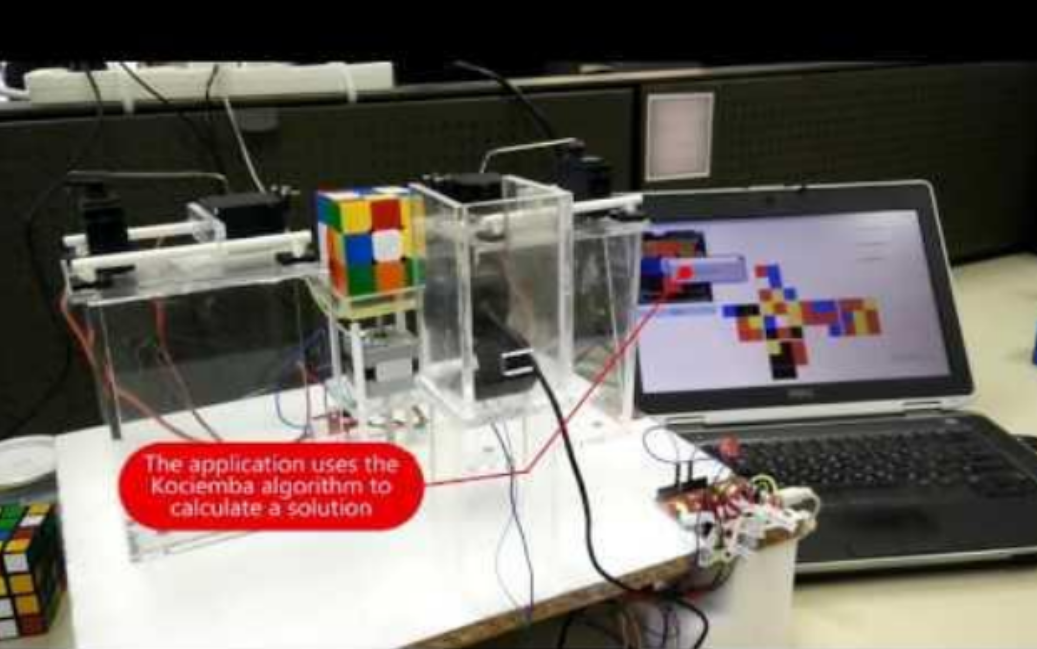
Completed
The objective is to design a system which is able to automatically detect the scrambled state of a Rubik's Cube using image processing and analysis methods. The state information is used as an input for the computation of the solving algorithm. The output of the solving algorithm is a list of necessary movements to bring the cube into its initial ordered state. Finally, four grippers are being controlled to carry out the computed movements.Completed
With the ever evolving robot eco- system, robots are becoming more and more modular, in attempt to keep up with the change , Robotics club of IITG is trying to build transformer robot , following the movie series of transformer .
Completed
The light from led’s is projected on the skin. Led’s are placed in a U shaped fashion to maximise the power concentration. Projected near-infrared light is absorbed by blood and reflected by surrounding tissue. Through a infrared filter enabled camera we would be able to see the light reflected by the skin. Since the vein absorbed the infrared rays we can clearly see the veins.