# Conventions
## General
### Robot Coordinate System
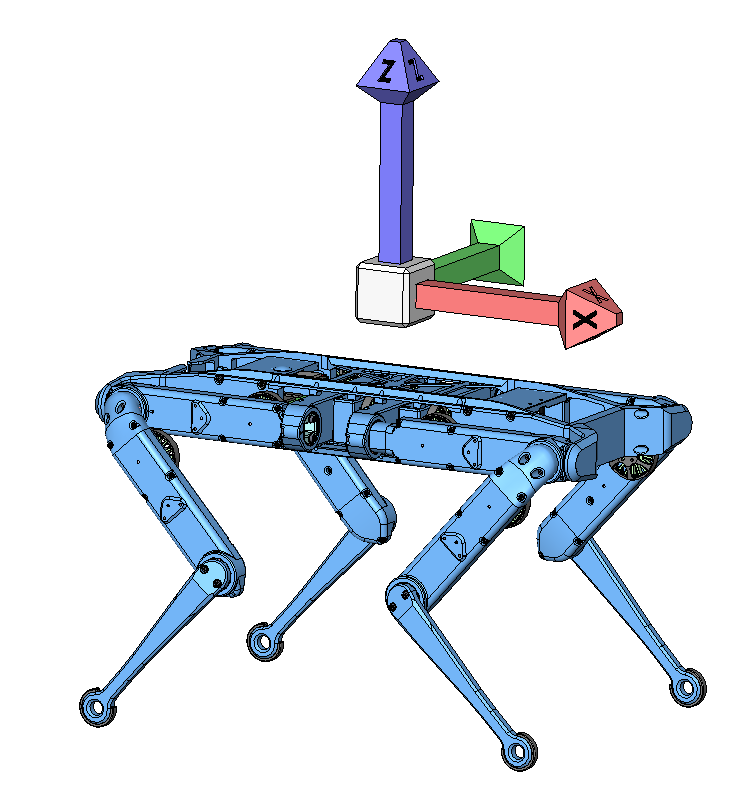
*Robot Coordinate System Convention*
* all our robot coordinate systems are oriented as shown above
* Positive X Axis = Forward
* Positive Y Axis = Left
* Positive Z Axis = Upwards
### Leg Naming Convention
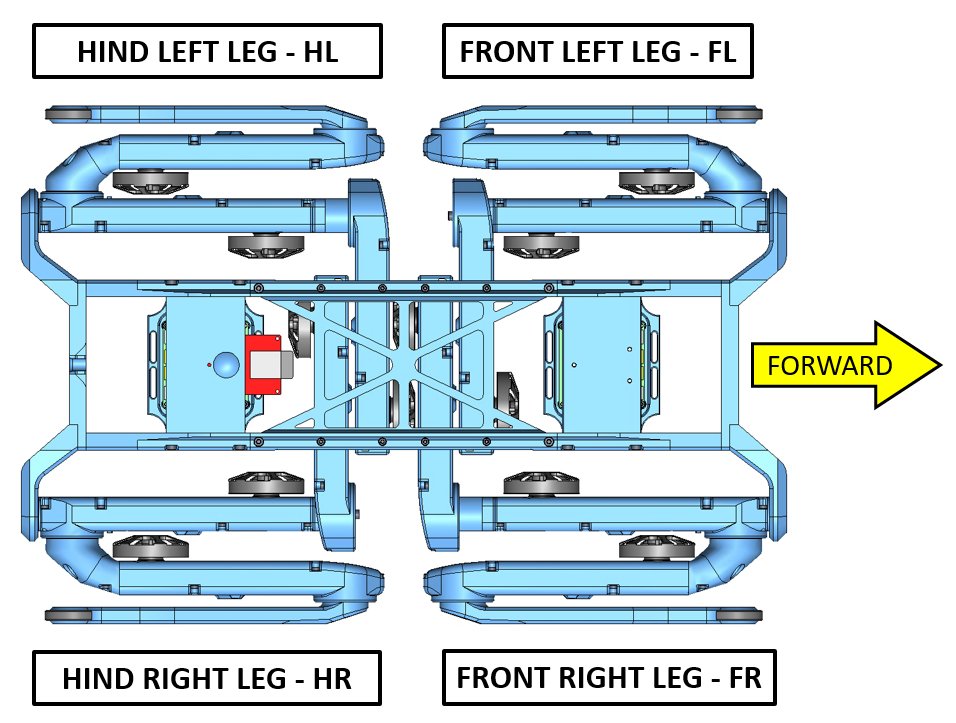
*Naming Convention Legs - Quadruped Robot*
* Front Right Leg = FR
* Front Left Leg = FL
* Hind Right Leg = HR
* Hind Left Leg = HL
### Degree of Freedom Naming Convention
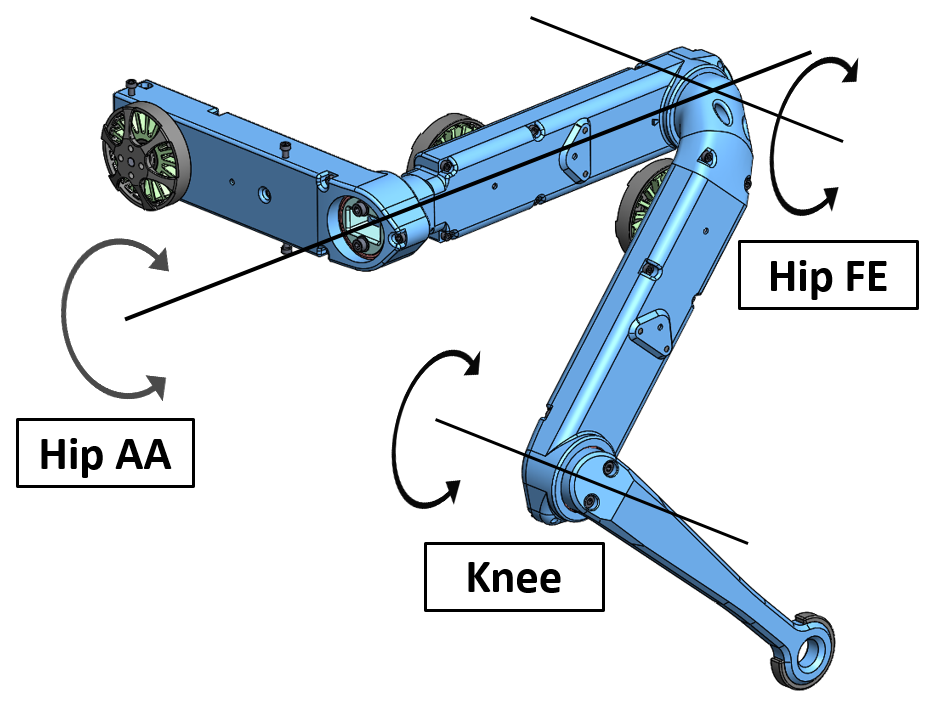
*Naming Convention Degrees of Freedom - 3dof leg*
* Hip Abduction Adduction = Hip AA
* Hip Flexion Extension = Hip FE
* Knee Flexion Extension = Knee
* we use the following abbreviations to label the degrees of freedom
|DOF Abbreviation |DOF Name|
|---|---|
|FRHAA|Front Right Hip Abduction Adduction|
|FRHFE|Front Right Hip Flexion Extension|
|FRK|Front Right Knee|
|FLHAA|Front Left Hip Abduction Adduction|
|FLHFE|Front Left Hip Flexion Extension|
|FLK|Front Left Knee|
|HRHAA|Hind Right Hip Abduction Adduction|
|HRHFE|Hind Right Hip Flexion Extension|
|HRK|Hind Right Knee|
|HLHAA|Hind Left Hip Abduction Adduction|
|HLHFE|Hind Left Hip Flexion Extension|
|HLK|Hind Left Knee|
### Direction of Rotation Motor
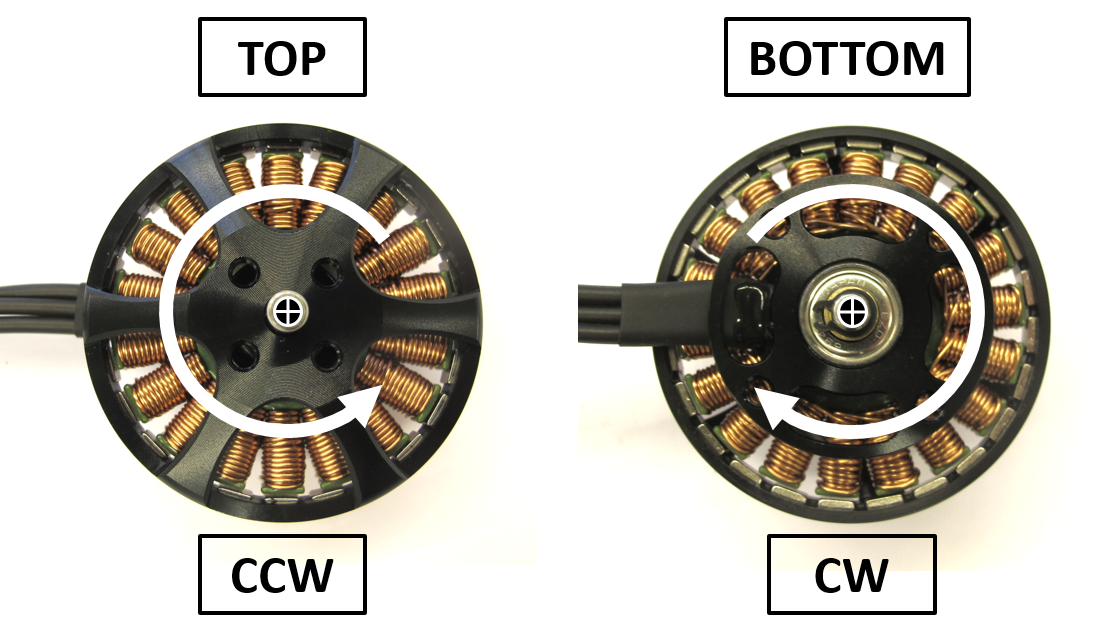
*The positive direction of rotation is counterclockwise when looking at the motor from the top.*
### Direction of Rotation Leg
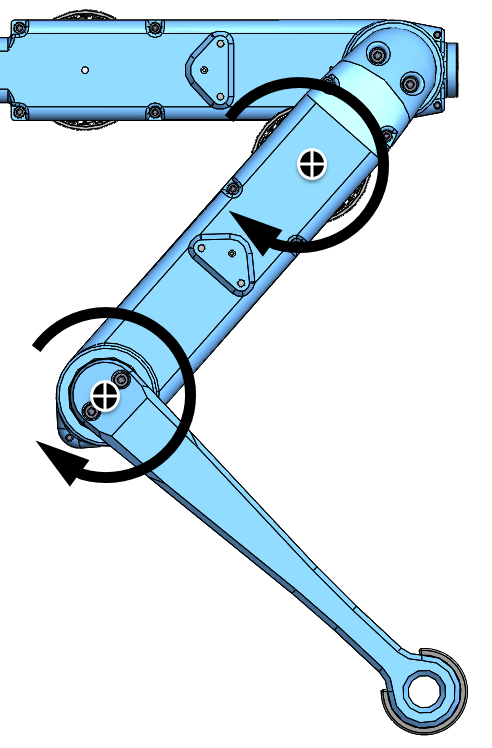
*The positive direction of rotation is clockwise when looking at the robot leg from the side.*
### Neutral standing height
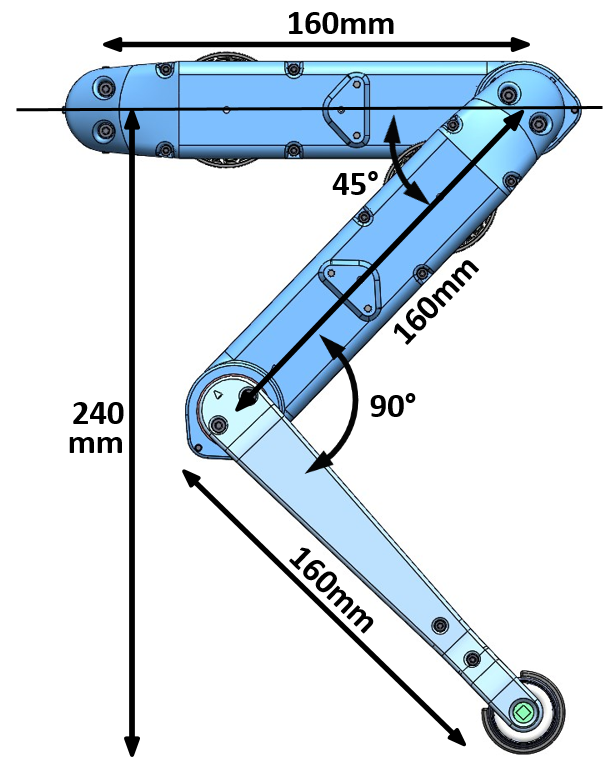
*Neutral standing height*
We consider the leg to be at neutral standing height when the Hip FE angle is at 45 degrees and the knee angle is at 90 degrees.
Our quadrupeds have a segment length of 16cm and a neutral standing height of 24cm.
---
## Mechanics
### 3D Printing
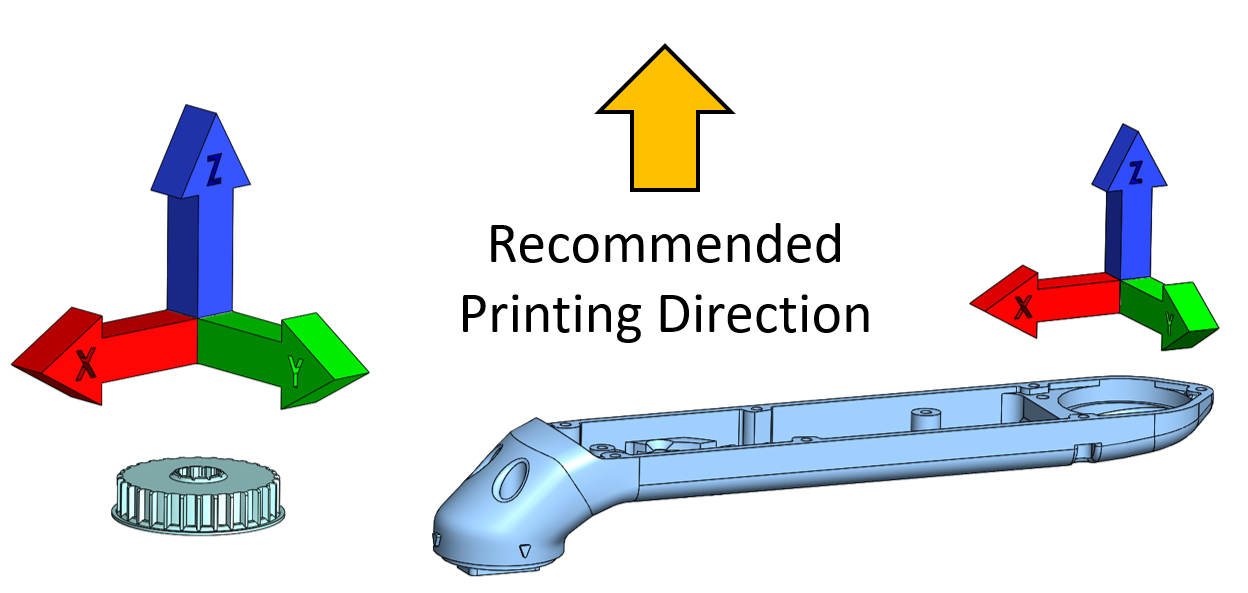
*The recommended printing direction is the positive z-axis-direction of the STL files.*
### Mechanical Interface Actuator Modules
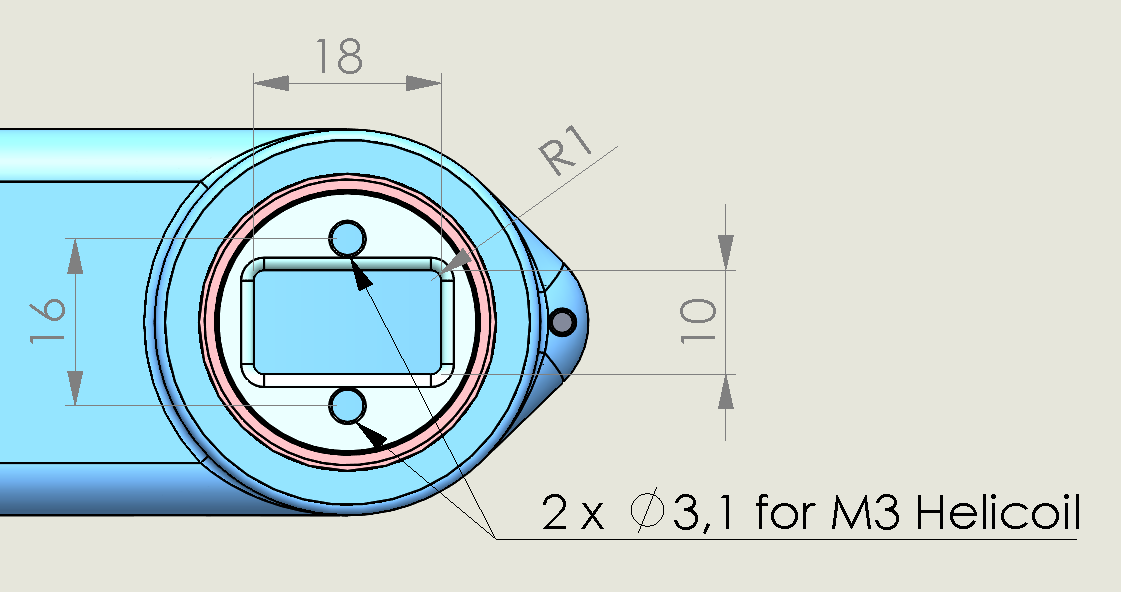
*We use the same mechanical output interface for all the actuator modules.*
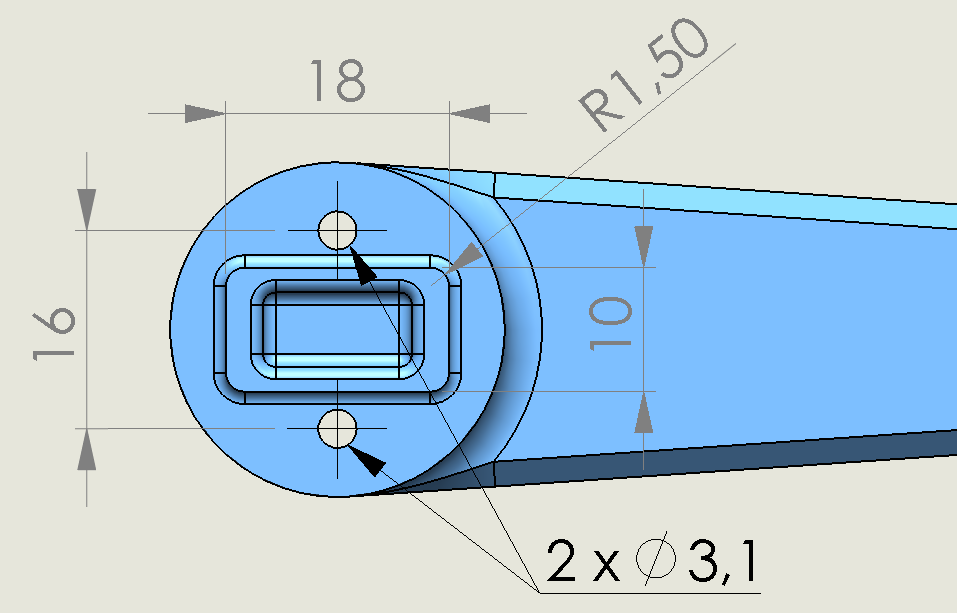
*Mechanical interface for the segments.*
---
## Electronics
### Wiring Conventions
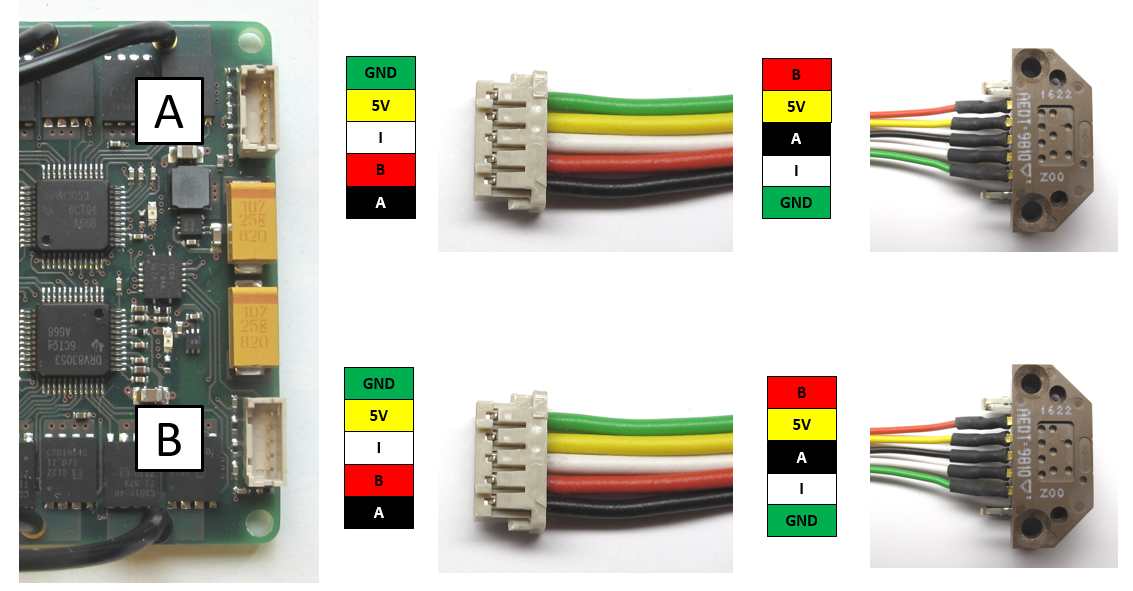
*Click on picture to view the wiring documentation page*
The wiring conventions for the actuator modules and the electronics are documented here: [Details Wiring](../../electronics/details/details_wiring.md)
---
## More Information
[Open Dynamic Robot Initiative - Webpage](https://open-dynamic-robot-initiative.github.io)
[Open Dynamic Robot Initiative - YouTube Channel](https://www.youtube.com/channel/UCx32JW2oIrax47Gjq8zNI-w)
[Open Dynamic Robot Initiative - Forum](https://odri.discourse.group/categories)
[Open Dynamic Robot Initiative - Paper](https://arxiv.org/pdf/1910.00093.pdf)
[Hardware Overview](../../README.md#open-robot-actuator-hardware)
[Software Overview](https://github.com/open-dynamic-robot-initiative/open-dynamic-robot-initiative.github.io/wiki)
## Authors
Felix Grimminger
## License
BSD 3-Clause License
## Copyright
Copyright (c) 2019-2020, Max Planck Gesellschaft and New York University