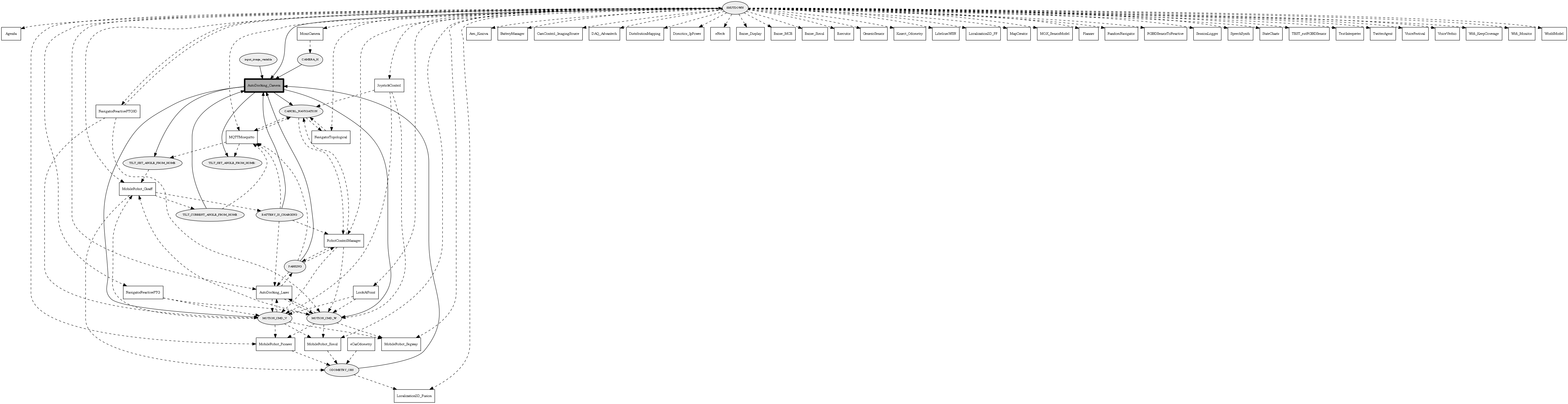
| Module name | Short description | Publishes | Subscribes |
| AutoDocking_Camera | This module endows the robot the capability of autonomous docking. | CANCEL_NAVIGATION , MOTION_CMD_V , MOTION_CMD_W , TILT_SET_ANGLE_FROM_HOME , TILT_SET_ANGLE_FROM_HOME: | BATTERY_IS_CHARGING , CAMERA_H , input_image_variable , ODOMETRY_OBS , PARKING , SHUTDOWN , TILT_CURRENT_ANGLE_FROM_HOME |
(None)