Aerial Robotic Network for Agricultural Applications
The combination of robotics and precision agriculture.
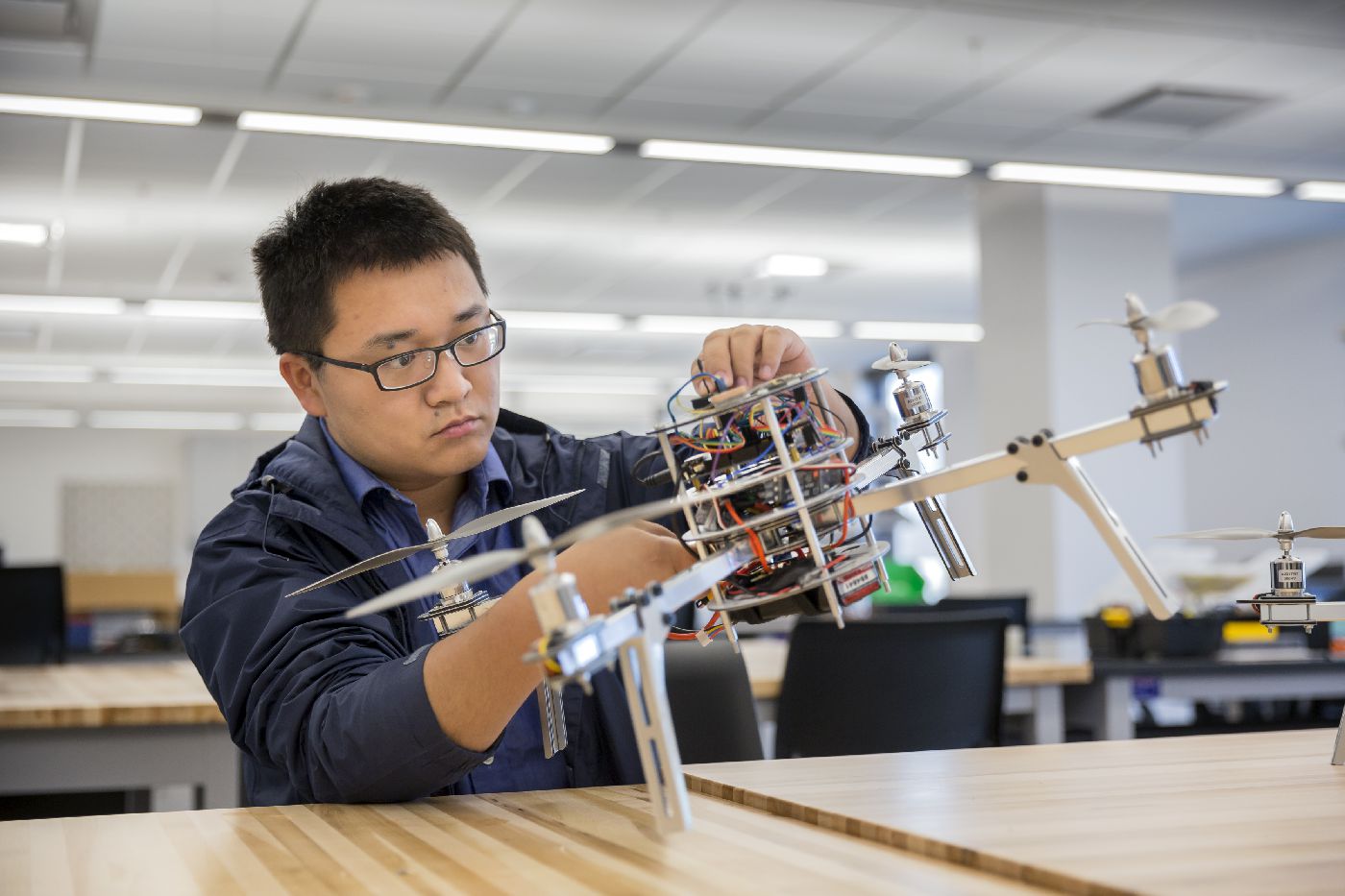
Tairan Liu - Ph.D. Candidate
This research lies at the intersection of precision agriculture and robotics. The long-term objective of this research is to develop multi-agent systems, composed of a network of coordinated autonomous and/or semi-autonomous air and ground vehicles, for sensing and control of agricultural and environmental systems. Applications include inspecting and managing quality attributes for plant crops (e.g., growth, stress conditions, biomass, seeding, and herbicide spraying) and monitoring air/water quality. The idea is motivated by the fact that robotic systems can offer significantly higher temporal and spatial resolution than satellite imagery or manned systems as well as be deployed in areas that are inaccessible to humans. Further, a multi-agent system can provide more efficient and robust data collection and actuation over large geographical areas than a single (manned or unmanned) vehicle. We believe such systems have the potential to increase the effectiveness and efficiency of agriculture field operations (e.g., provide early detection of insect contamination, reduce the use of chemicals, and eliminate herbicide-resistant weeds), which are typically labor intensive and time consuming. The innovation of this research lies in the use of the emerging concept of multi-agent systems as a means of designing mobile, remote sensing networks targeted at agricultural and environmental applications.