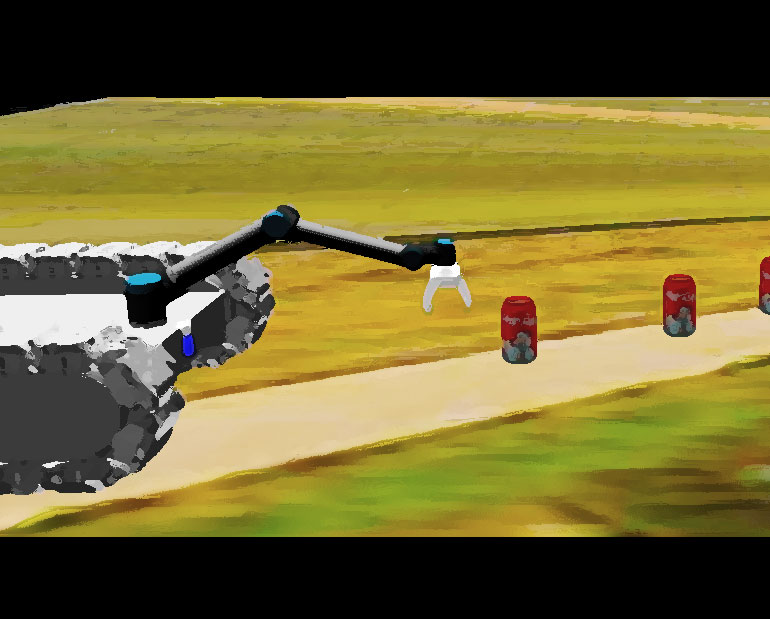
This project was a simulation of a robot prototype for collecting waste from the street and
deposit into a main container. The simulation was done in Gazebo and programmed using Robot Operating System.
Details
Date:August 22, 2016
Client:U.S based startup
Category:Robotics simulation & Application
Skills used:3D modeling and simulation, Robot applications, Robot Vision