| Module name | Short description | Publishes | Subscribes |
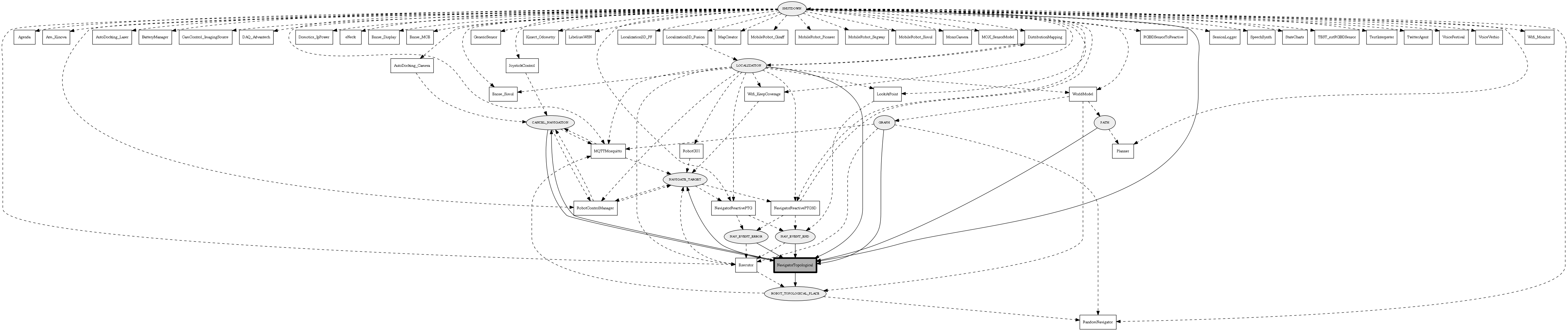
| NavigatorTopological | Module to perform topological navigation | CANCEL_NAVIGATION , NAVIGATE_TARGET , ROBOT_TOPOLOGICAL_PLACE | CANCEL_NAVIGATION , GRAPH , LOCALIZATION , NAV_EVENT_END , NAV_EVENT_ERROR , PATH , SHUTDOWN |
(None)