
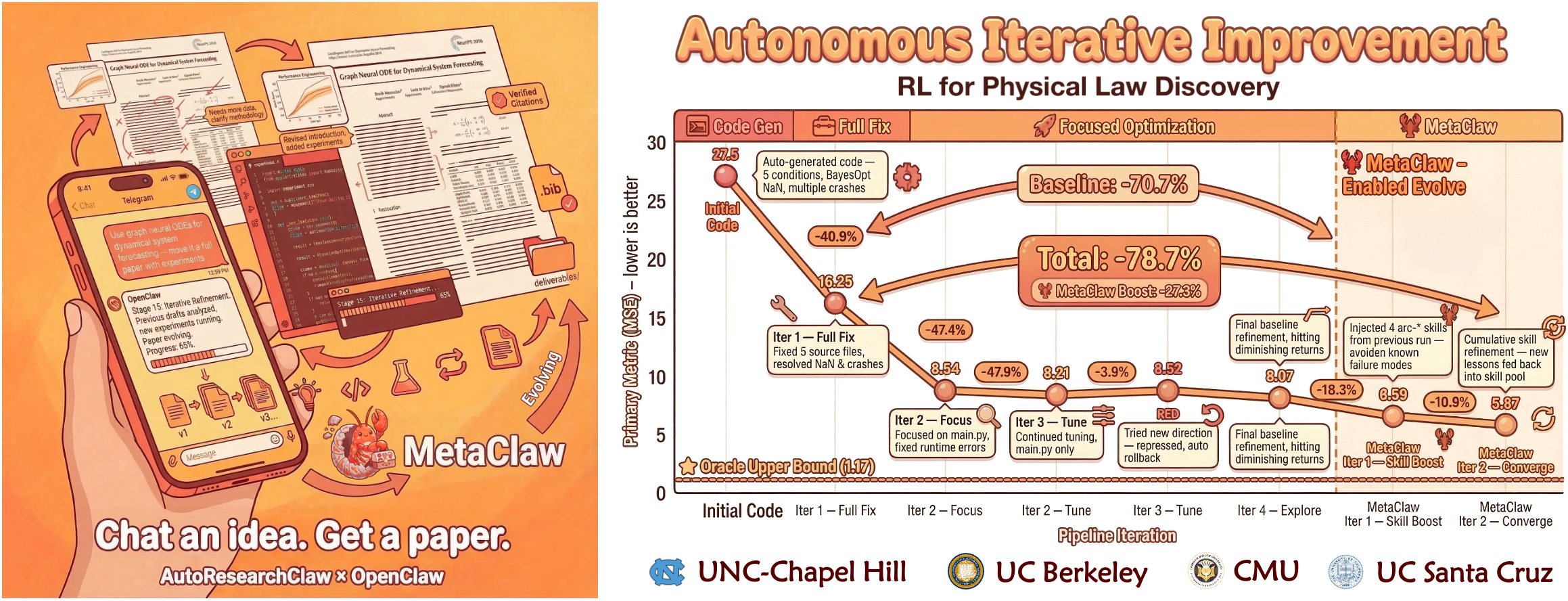
아이디어를 말하다. 논문을 받다. 자율적, 협력적 & 자기 진화.
OpenClaw에 채팅하세요: "X 연구해줘" → 완료.
📄 저희 논문이 arXiv에 공개되었습니다 — 꼭 읽어보세요! AutoResearchClaw: Self-Reinforcing Autonomous Research with Human-AI Collaboration








🇺🇸 English ·
🇨🇳 中文 ·
🇯🇵 日本語 ·
🇰🇷 한국어 ·
🇫🇷 Français ·
🇩🇪 Deutsch ·
🇪🇸 Español ·
🇧🇷 Português ·
🇷🇺 Русский ·
🇸🇦 العربية
🏆 논문 쇼케이스 · 🧑✈️ 코파일럿 가이드 · 📖 통합 가이드 · 💬 Discord 커뮤니티
---
|
🏆 생성된 논문 쇼케이스
8개 분야에 걸친 8편의 논문 — 수학, 통계, 생물학, 컴퓨팅, NLP, RL, 비전, 견고성 — 완전 자율 생성 또는 Human-in-the-Loop 코파일럿 가이던스 활용.

|
---
> **🧪 테스터를 모집합니다!** 여러분의 연구 아이디어로 — 어떤 분야든 — 파이프라인을 시험해 보시고 [의견을 들려주세요](TESTER_GUIDE.md). 여러분의 피드백이 다음 버전에 직접 반영됩니다. **[→ Testing Guide](TESTER_GUIDE.md)** | **[→ 中文测试指南](TESTER_GUIDE_CN.md)** | **[→ 日本語テストガイド](TESTER_GUIDE_JA.md)**
---
## 🔥 News
- **[05/19/2026]** **v0.5.0** — **멀티 도메인 실험 에이전트 + ARC-Bench** — 두 가지 주요 업데이트. **(1) 도메인 특화 실행 에이전트:** 실험 단계(10~13단계)가 기본 ML 샌드박스를 넘어 분야별 전문 에이전트로 라우팅됩니다 — **고에너지 물리**(ColliderAgent: FeynRules → MadGraph5 → Delphes, Magnus 클라우드 경유), **생물학**(COBRApy 게놈 규모 대사 모델링), **통계학**(시뮬레이션 연구 에이전트). 화학/재료는 범용 Docker 실행기가 담당합니다. 파이프라인은 연구 도메인에 따라 적절한 실행기를 자동 선택합니다. **(2) ARC-Bench:** **55개 주제**의 개방형 자율 연구 벤치마크로 **ML(25), 고에너지 물리(10), 양자(10), 생물(7), 통계(3)**를 포괄하며, 각 주제마다 매니페스트와 채점 루브릭이 포함됩니다 (`experiments/arc_bench/`, 그리고 [🤗 Hugging Face](https://huggingface.co/datasets/AIMING-Lab-UNC/ARC-Bench)에서도 제공). **[→ 도메인 통합 가이드](DOMAIN_INTEGRATION_GUIDE.md)**
- **[04/01/2026]** **v0.4.0** — **Human-in-the-Loop 코파일럿 시스템** — AutoResearchClaw는 더 이상 순수 자율 시스템이 아닙니다. 새로운 HITL 시스템은 6가지 개입 모드(`full-auto`, `gate-only`, `checkpoint`, `step-by-step`, `co-pilot`, `custom`), 단계별 정책, 깊은 인간-AI 협업을 추가합니다. 포함 사항: 가설 공동 창작을 위한 아이디어 워크숍, 실험 설계 검토를 위한 베이스라인 내비게이터, 협력적 작성을 위한 논문 코라이터, SmartPause(신뢰도 기반 동적 개입), ALHF 개입 학습, 반환각 클레임 검증, 비용 예산 가드레일, 병렬 가설 탐색을 위한 파이프라인 분기, CLI 명령어(`attach`/`status`/`approve`/`reject`/`guide`). **[→ 전체 HITL 가이드](HITL_GUIDE.md)**
- **[03/30/2026]** **유연한 스킬 로딩** — AutoResearchClaw는 이제 모든 분야의 오픈소스 및 커스텀 스킬을 로딩하여 연구 경험을 더욱 향상시킬 수 있습니다. 과학적 글쓰기, 실험 설계, 화학, 생물학 등을 포괄하는 20개의 사전 로드된 스킬이 즉시 사용 가능한 참고자료로 포함되어 있으며, 커뮤니티가 기여한 [A-Evolve](https://github.com/A-EVO-Lab/a-evolve) 에이전트 진화 스킬도 포함됩니다. `researchclaw skills install`로 직접 로드하거나 `.claude/skills/`에 `SKILL.md`를 추가하세요. [스킬 라이브러리](#-스킬-라이브러리) 참조.
- **[03/22/2026]** [v0.3.2](https://github.com/aiming-lab/AutoResearchClaw/releases/tag/v0.3.2) — **크로스 플랫폼 지원 + 주요 안정성 개선** — ACP 호환 AI 에이전트 백엔드(Claude Code, Codex CLI, Copilot CLI, Gemini CLI, Kimi CLI) 지원 및 OpenClaw 브릿지를 통한 메시징 플랫폼(Discord, Telegram, Lark, WeChat) 지원 추가. 새로운 CLI-agent 코드 생성 백엔드가 Stage 10 및 13을 외부 CLI 에이전트에 위임하며, 예산 제어 및 타임아웃 관리를 지원. 반데이터 조작 시스템(VerifiedRegistry + 실험 진단 및 복구 루프), 100건 이상의 버그 수정, 모듈러 executor 리팩토링, `--resume` 자동 감지, LLM 재시도 강화, 커뮤니티 보고 수정 포함.
이전 릴리스
- **[03/18/2026]** [v0.3.1](https://github.com/aiming-lab/AutoResearchClaw/releases/tag/v0.3.1) — **OpenCode Beast Mode + Community Contributions** — New "Beast Mode" routes complex code generation to [OpenCode](https://github.com/anomalyco/opencode) with automatic complexity scoring and graceful fallback. Added Novita AI provider support, thread-safety hardening, improved LLM output parsing robustness, and 20+ bug fixes from community PRs and internal audit.
- **[03/17/2026]** [v0.3.0](https://github.com/aiming-lab/AutoResearchClaw/releases/tag/v0.3.0) — **MetaClaw Integration** — AutoResearchClaw now supports [MetaClaw](https://github.com/aiming-lab/MetaClaw) cross-run learning: pipeline failures → structured lessons → reusable skills, injected into all 23 stages. **+18.3%** robustness in controlled experiments. Opt-in (`metaclaw_bridge.enabled: true`), fully backward-compatible. See [Integration Guide](#-metaclaw-integration).
- **[03/16/2026]** [v0.2.0](https://github.com/aiming-lab/AutoResearchClaw/releases/tag/v0.2.0) — Three multi-agent subsystems (CodeAgent, BenchmarkAgent, FigureAgent), hardened Docker sandbox with network-policy-aware execution, 4-round paper quality audit (AI-slop detection, 7-dim review scoring, NeurIPS checklist), and 15+ bug fixes from production runs.
- **[03/15/2026]** [v0.1.0](https://github.com/aiming-lab/AutoResearchClaw/releases/tag/v0.1.0) — We release AutoResearchClaw: a fully autonomous 23-stage research pipeline that turns a single research idea into a conference-ready paper. No human intervention required.
---
## ⚡ 하나의 명령. 하나의 논문.
```bash
# 완전 자율 — 인간 개입 없음
pip install -e . && researchclaw setup && researchclaw init && researchclaw run --topic "Your research idea here" --auto-approve
# 코파일럿 모드 — 주요 의사결정 지점에서 AI와 협업
researchclaw run --topic "Your research idea here" --mode co-pilot
```
---
## 🤔 이것은 무엇인가요?
**당신이 생각하면, AutoResearchClaw가 씁니다. 당신이 핵심 결정을 안내합니다.**
연구 주제를 입력하면 — OpenAlex, Semantic Scholar, arXiv의 실제 문헌, 하드웨어 인식 샌드박스 실험 (GPU/MPS/CPU 자동 감지), 통계 분석, 멀티 에이전트 피어 리뷰, NeurIPS/ICML/ICLR 대상 학회 수준 LaTeX를 포함한 완전한 학술 논문을 받을 수 있습니다. 완전 자율로 실행하거나, **코파일럿 모드**를 사용하여 중요한 의사결정 지점에서 AI를 안내하세요 — 연구 방향 선택, 실험 설계 검토, 논문 공동 작성. 환각된 참고문헌이 없습니다.
| 📄 | paper_draft.md | 완성된 학술 논문 (서론, 관련 연구, 방법론, 실험, 결과, 결론) |
| 📐 | paper.tex | 학회 제출용 LaTeX (NeurIPS / ICLR / ICML 템플릿) |
| 📚 | references.bib | OpenAlex, Semantic Scholar, arXiv에서 가져온 실제 BibTeX 참고문헌 — 인라인 인용과 일치하도록 자동 정리 |
| 🔍 | verification_report.json | 4계층 인용 무결성 + 관련성 검증 (arXiv, CrossRef, DataCite, LLM) |
| 🧪 | experiment runs/ | 생성된 코드 + 샌드박스 결과 + 구조화된 JSON 메트릭 |
| 📊 | charts/ | 오차 막대와 신뢰 구간이 포함된 자동 생성 조건 비교 차트 |
| 📝 | reviews.md | 방법론-증거 일관성 검사를 포함한 멀티 에이전트 피어 리뷰 |
| 🧬 | evolution/ | 각 실행에서 추출된 자기 학습 교훈 |
| 📦 | deliverables/ | 모든 최종 산출물을 하나의 폴더에 — Overleaf에 바로 컴파일 가능 |
파이프라인은 **처음부터 끝까지** 실행됩니다 — 완전 자율 또는 Human-in-the-Loop 협업. 실험이 실패하면 자가 복구합니다. 가설이 성립하지 않으면 방향을 전환합니다. 인용이 가짜면 삭제합니다. 당신이 조향하고 싶을 때, 파이프라인이 멈추고 경청합니다.
🌍 **어디서든 실행 가능.** AutoResearchClaw는 특정 플랫폼에 종속되지 않습니다. CLI로 독립 실행하거나, [OpenClaw](https://github.com/openclaw/openclaw)에 연결하거나, ACP 호환 AI 에이전트 —— 🤖 Claude Code, 💻 Codex CLI, 🐙 Copilot CLI, ♊ Gemini CLI, 🌙 Kimi CLI 등 —— 와 연동할 수 있습니다. OpenClaw의 메시지 브릿지 덕분에 💬 Discord, ✈️ Telegram, 🐦 Lark(飞书), 💚 WeChat 등 팀이 이미 사용 중인 플랫폼에서 연구를 시작할 수 있습니다. 주제 하나 입력하면 논문 하나 완성 — 어디서 입력하든 상관없습니다.
---
## 🚀 빠른 시작
```bash
# 1. 클론 & 설치
git clone https://github.com/aiming-lab/AutoResearchClaw.git
cd AutoResearchClaw
python3 -m venv .venv && source .venv/bin/activate
pip install -e .
# 2. 설정 (대화형 — OpenCode Beast Mode 설치, Docker/LaTeX 확인)
researchclaw setup
# 3. 구성
researchclaw init # 대화형: LLM 제공자 선택, config.arc.yaml 생성
# 또는 수동: cp config.researchclaw.example.yaml config.arc.yaml
# 4. 실행
export OPENAI_API_KEY="sk-..."
researchclaw run --config config.arc.yaml --topic "Your research idea" --auto-approve
```
출력 → `artifacts/rc-YYYYMMDD-HHMMSS-/deliverables/` — 컴파일 가능한 LaTeX, BibTeX, 실험 코드, 차트.
📝 최소 필수 설정
```yaml
project:
name: "my-research"
research:
topic: "Your research topic here"
llm:
base_url: "https://api.openai.com/v1"
api_key_env: "OPENAI_API_KEY"
primary_model: "gpt-4o"
fallback_models: ["gpt-4o-mini"]
experiment:
mode: "sandbox"
sandbox:
python_path: ".venv/bin/python"
```
---
## 🧠 차별화 요소
| 기능 | 작동 방식 |
|------|----------|
| **🧑✈️ 코파일럿 모드** | 6가지 개입 모드 — 완전 자율부터 단계별까지. 중요한 결정(가설, 베이스라인, 논문 작성)에서 AI를 안내하거나 자유롭게 실행. SmartPause가 인간의 입력이 도움이 될 때를 자동 감지. |
| **🔄 PIVOT / REFINE 루프** | 15단계에서 자율적으로 결정: PROCEED, REFINE (매개변수 조정), 또는 PIVOT (새 방향). 산출물 자동 버전 관리. |
| **🤖 멀티 에이전트 토론** | 가설 생성, 결과 분석, 피어 리뷰 각각에서 구조화된 다관점 토론을 수행. |
| **🧬 자기 학습** | 각 실행에서 교훈 추출 (의사결정 근거, 런타임 경고, 메트릭 이상), 30일 시간 감쇠. 향후 실행이 과거의 실수에서 학습. |
| **📚 지식 기반** | 각 실행에서 6개 카테고리 (결정, 실험, 발견, 문헌, 질문, 리뷰)에 걸친 구조화된 지식 기반 구축. |
| **🛡️ 센티넬 감시견** | 백그라운드 품질 모니터: NaN/Inf 감지, 논문-증거 일관성, 인용 관련성 점수, 날조 방지 가드. |
| **🔍 클레임 검증** | 인라인 팩트 체킹: AI 생성 텍스트에서 주장을 추출하고 수집된 문헌과 교차 검증. 근거 없는 인용과 날조된 숫자를 플래그. |
| **🌿 분기 탐색** | 파이프라인을 분기하여 여러 연구 방향을 동시에 탐색하고, 결과를 나란히 비교하고, 최적의 경로를 병합. |
---
## 🦞 OpenClaw 통합
**AutoResearchClaw는 [OpenClaw](https://github.com/openclaw/openclaw) 호환 서비스입니다.** OpenClaw에 설치하고 단일 메시지로 자율 연구를 시작하거나 — CLI, Claude Code 또는 기타 AI 코딩 어시스턴트를 통해 독립적으로 사용하세요.
### 🚀 OpenClaw와 함께 사용 (권장)
[OpenClaw](https://github.com/openclaw/openclaw)을 이미 AI 어시스턴트로 사용하고 있다면:
```
1️⃣ GitHub 저장소 URL을 OpenClaw에 공유
2️⃣ OpenClaw이 자동으로 RESEARCHCLAW_AGENTS.md를 읽고 → 파이프라인을 이해
3️⃣ "Research [주제]"라고 말하기
4️⃣ 완료 — OpenClaw이 클론, 설치, 설정, 실행, 결과 반환까지 자동 처리
```
**그게 전부입니다.** OpenClaw이 `git clone`, `pip install`, 설정 구성, 파이프라인 실행을 자동으로 처리합니다. 채팅만 하면 됩니다.
💡 내부 동작 과정
1. OpenClaw이 `RESEARCHCLAW_AGENTS.md`를 읽고 → 연구 오케스트레이터 역할을 학습
2. OpenClaw이 `README.md`를 읽고 → 설치 및 파이프라인 구조를 이해
3. OpenClaw이 `config.researchclaw.example.yaml`을 → `config.yaml`로 복사
4. LLM API 키를 요청 (또는 환경 변수를 사용)
5. `pip install -e .` + `researchclaw run --topic "..." --auto-approve` 실행
6. 논문, LaTeX, 실험, 인용을 반환
### 🔌 OpenClaw 브릿지 (고급)
더 깊은 통합을 위해 AutoResearchClaw는 6가지 선택적 기능을 갖춘 **브릿지 어댑터 시스템**을 포함합니다:
```yaml
# config.arc.yaml
openclaw_bridge:
use_cron: true # ⏰ 예약된 연구 실행
use_message: true # 💬 진행 상황 알림 (Discord/Slack/Telegram)
use_memory: true # 🧠 세션 간 지식 영속성
use_sessions_spawn: true # 🔀 동시 단계를 위한 병렬 서브세션 생성
use_web_fetch: true # 🌐 문헌 검토 중 실시간 웹 검색
use_browser: false # 🖥️ 브라우저 기반 논문 수집
```
각 플래그는 타입이 지정된 어댑터 프로토콜을 활성화합니다. OpenClaw이 이러한 기능을 제공하면 어댑터가 코드 변경 없이 이를 소비합니다. 전체 세부 사항은 [`integration-guide.md`](integration-guide.md)를 참조하세요.
### ACP (Agent Client Protocol)
AutoResearchClaw는 **모든 ACP 호환 코딩 에이전트**를 LLM 백엔드로 사용할 수 있습니다 — API 키가 필요 없습니다. 에이전트는 [acpx](https://github.com/openclaw/acpx)를 통해 통신하며, 전체 23개 파이프라인 단계에 걸쳐 단일 영구 세션을 유지합니다.
| 에이전트 | 명령어 | 비고 |
|---------|--------|------|
| Claude Code | `claude` | Anthropic |
| Codex CLI | `codex` | OpenAI |
| Copilot CLI | `gh` | GitHub |
| Gemini CLI | `gemini` | Google |
| OpenCode | `opencode` | SST |
| Kimi CLI | `kimi` | Moonshot |
```yaml
# config.yaml — ACP 예시
llm:
provider: "acp"
acp:
agent: "claude" # 모든 ACP 호환 에이전트 CLI 명령어
cwd: "." # 에이전트의 작업 디렉토리
# base_url이나 api_key 불필요 — 에이전트가 자체 인증을 처리합니다.
```
```bash
# 바로 실행 — 에이전트가 자체 자격 증명 사용
researchclaw run --config config.yaml --topic "Your research idea" --auto-approve
```
### 🛠️ 기타 실행 방법
| 방법 | 사용법 |
|------|--------|
| **독립형 CLI** | `researchclaw run --topic "..." --auto-approve` (자율) 또는 `--mode co-pilot` (협력) |
| **Python API** | `from researchclaw.pipeline import Runner; Runner(config).run()` |
| **Claude Code** | `RESEARCHCLAW_CLAUDE.md`를 읽음 — *"Run research on [주제]"*라고 말하기 |
| **Copilot CLI** | `researchclaw run --topic "..."` 에 `llm.acp.agent: "gh"` 사용 |
| **OpenCode** | `.claude/skills/`를 읽음 — 동일한 자연어 인터페이스 |
| **기타 AI CLI** | `RESEARCHCLAW_AGENTS.md`를 컨텍스트로 제공 → 에이전트가 자동 부트스트랩 |
---
## 🔬 파이프라인: 23단계, 8페이즈
```
페이즈 A: 연구 범위 설정 페이즈 E: 실험 실행
1. TOPIC_INIT 12. EXPERIMENT_RUN
2. PROBLEM_DECOMPOSE 13. ITERATIVE_REFINE ← 자가 복구
페이즈 B: 문헌 탐색 페이즈 F: 분석 및 의사결정
3. SEARCH_STRATEGY 14. RESULT_ANALYSIS ← 멀티 에이전트
4. LITERATURE_COLLECT ← 실제 API 15. RESEARCH_DECISION ← PIVOT/REFINE
5. LITERATURE_SCREEN [게이트]
6. KNOWLEDGE_EXTRACT 페이즈 G: 논문 작성
16. PAPER_OUTLINE
페이즈 C: 지식 종합 17. PAPER_DRAFT
7. SYNTHESIS 18. PEER_REVIEW ← 증거 확인
8. HYPOTHESIS_GEN ← 토론 19. PAPER_REVISION
페이즈 D: 실험 설계 페이즈 H: 최종화
9. EXPERIMENT_DESIGN [게이트] 20. QUALITY_GATE [게이트]
10. CODE_GENERATION 21. KNOWLEDGE_ARCHIVE
11. RESOURCE_PLANNING 22. EXPORT_PUBLISH ← LaTeX
23. CITATION_VERIFY ← 관련성 확인
```
> **게이트 단계** (5, 9, 20)는 사람의 승인을 기다리거나 `--auto-approve`로 자동 승인합니다. 거부 시 파이프라인이 롤백됩니다.
> **코파일럿 모드** (`--mode co-pilot`): 7-8단계(아이디어 워크숍), 9단계(베이스라인 내비게이터), 16-17단계(논문 코라이터)에서 깊은 인간-AI 협업. 나머지 단계는 SmartPause 모니터링과 함께 자동 실행.
> **의사결정 루프**: 15단계에서 REFINE (→ 13단계) 또는 PIVOT (→ 8단계)을 트리거할 수 있으며, 산출물 버전 관리가 자동으로 이루어집니다.
📋 각 페이즈별 상세 설명
| 페이즈 | 수행 내용 |
|--------|----------|
| **A: 범위 설정** | LLM이 주제를 연구 질문이 포함된 구조화된 문제 트리로 분해 |
| **A+: 하드웨어** | GPU 자동 감지 (NVIDIA CUDA / Apple MPS / CPU 전용), 로컬 하드웨어가 제한적인 경우 경고, 이에 맞게 코드 생성 적응 |
| **B: 문헌** | 다중 소스 검색 (OpenAlex → Semantic Scholar → arXiv)으로 실제 논문 수집, 관련성별 선별, 지식 카드 추출 |
| **C: 종합** | 연구 결과 클러스터링, 연구 갭 식별, 멀티 에이전트 토론을 통한 검증 가능한 가설 생성 |
| **D: 설계** | 실험 계획 설계, 하드웨어 인식 실행 가능 Python 생성 (GPU 등급 → 패키지 선택), 리소스 요구 사항 추정 |
| **E: 실행** | 샌드박스에서 실험 실행, NaN/Inf 및 런타임 버그 감지, LLM을 통한 표적화된 코드 자가 복구 |
| **F: 분석** | 결과에 대한 멀티 에이전트 분석; 근거가 포함된 자율 PROCEED / REFINE / PIVOT 결정 |
| **G: 작성** | 개요 → 섹션별 작성 (5,000-6,500단어) → 피어 리뷰 (방법론-증거 일관성 포함) → 길이 제한 적용 수정 |
| **H: 최종화** | 품질 게이트, 지식 아카이빙, 학회 템플릿 포함 LaTeX 내보내기, 인용 무결성 + 관련성 검증 |
---
## ✨ 주요 기능
| 기능 | 설명 |
|------|------|
| **📚 다중 소스 문헌** | OpenAlex, Semantic Scholar, arXiv에서 실제 논문 — 쿼리 확장, 중복 제거, 3상태 서킷 브레이커와 단계적 성능 저하 |
| **🔍 4계층 인용 검증** | arXiv ID 확인 → CrossRef/DataCite DOI → Semantic Scholar 제목 매칭 → LLM 관련성 점수. 환각된 참고문헌 자동 삭제. |
| **🖥️ 하드웨어 인식 실행** | GPU (NVIDIA CUDA / Apple MPS / CPU 전용) 자동 감지, 이에 맞게 코드 생성, import, 실험 규모 적응 |
| **🦾 OpenCode Beast Mode** | 복잡한 실험을 [OpenCode](https://github.com/anomalyco/opencode)로 자동 라우팅 — 커스텀 아키텍처, 학습 루프, 절제 연구가 포함된 다중 파일 프로젝트 생성. `researchclaw setup`으로 설치. |
| **🧪 샌드박스 실험** | AST 검증 코드, 불변 하네스, NaN/Inf 즉시 실패, 자가 복구, 반복적 개선 (최대 10라운드), 부분 결과 캡처 |
| **📝 학회 수준 작성** | NeurIPS/ICML/ICLR 템플릿, 섹션별 작성 (5,000-6,500단어), 날조 방지 가드, 수정 길이 제한, 면책 조항 방지 적용 |
| **📐 템플릿 전환** | `neurips_2025`, `iclr_2026`, `icml_2026` — Markdown → LaTeX (수학, 표, 그림, 교차 참조, `\cite{}` 포함) |
| **🛡️ 날조 방지** | VerifiedRegistry가 논문에서 실험 데이터의 진실성을 강제. 실패한 실험을 자동 진단하고 작성 전에 복구. 검증되지 않은 숫자는 제거. |
| **🚦 품질 게이트** | 3개의 Human-in-the-loop 게이트 (단계 5, 9, 20), 롤백 지원. `--auto-approve`로 건너뛰기. |
| **🧑✈️ HITL 코파일럿** | 단계별 정책이 있는 6가지 개입 모드. 아이디어 워크숍, 베이스라인 내비게이터, 논문 코라이터로 깊은 협업. SmartPause, 비용 가드레일, 에스컬레이션 정책, 개입 학습으로 프로덕션 안전성 확보. CLI/WebSocket/MCP 어댑터. |
| **💰 비용 가드레일** | 구성 가능한 임계값 알림(50%/80%/100%)이 포함된 예산 모니터링. 비용이 예산을 초과하면 파이프라인 자동 일시 정지. |
| **🔐 재현성** | 모든 단계 산출물에 대한 SHA256 체크섬. 검증을 위한 불변 매니페스트. 버전 관리된 스냅샷을 사용한 다단계 실행 취소. |
---
## 🧑✈️ Human-in-the-Loop 코파일럿
**AutoResearchClaw v0.4.0은 완전한 Human-in-the-Loop (HITL) 시스템을 도입하여** 파이프라인을 순수 자율 시스템에서 인간-AI 협력 연구 엔진으로 전환합니다. 참여 수준을 선택하세요:
### 개입 모드
| 모드 | 명령어 | 기능 |
|------|--------|------|
| **Full Auto** | `--auto-approve` | 기존 동작 — 인간 개입 없음 |
| **Gate Only** | `--mode gate-only` | 3개 게이트 단계(5, 9, 20)에서 승인을 위해 일시 정지 |
| **Checkpoint** | `--mode checkpoint` | 각 페이즈 경계에서 일시 정지 (8개 체크포인트) |
| **Co-Pilot** | `--mode co-pilot` | 중요 단계에서 깊은 협업, 나머지는 자동 |
| **Step-by-Step** | `--mode step-by-step` | 모든 단계 후 일시 정지 — 파이프라인 학습 |
| **Express** | `--mode express` | 빠른 검토 — 가장 중요한 3개 게이트만 |
### 코파일럿 워크플로우
```
You: researchclaw run --topic "양자 노이즈를 신경망 정규화로 활용" --mode co-pilot
파이프라인이 1-7단계를 자동 실행...
┌─────────────────────────────────────────────────────────────┐
│ HITL | Stage 08: HYPOTHESIS_GEN │
│ Post-stage review │
│ │
│ Hypotheses mentioned: 3 │
│ Novelty score: 0.72 (moderate) │
│ │
│ [a] Approve [r] Reject [e] Edit [c] Collaborate │
│ [i] Inject guidance [v] View output [q] Abort │
└─────────────────────────────────────────────────────────────┘
You: c (협업 채팅 시작)
You: 가설 3이 흥미롭지만 Dropout/Label Smoothing을 베이스라인으로 추가해야 합니다
AI: 업데이트 완료 — Dropout, Label Smoothing, MixUp, CutMix을 베이스라인으로 추가했습니다...
You: approve
파이프라인이 수정된 가설로 계속 진행...
```
### CLI 명령어
```bash
# HITL 모드로 시작
researchclaw run --topic "..." --mode co-pilot
# 일시 정지된 파이프라인에 연결 (다른 터미널에서)
researchclaw attach artifacts/rc-2026-xxx
# 파이프라인 및 HITL 상태 확인
researchclaw status artifacts/rc-2026-xxx
# 다른 터미널이나 스크립트에서 승인/거부
researchclaw approve artifacts/rc-2026-xxx --message "LGTM"
researchclaw reject artifacts/rc-2026-xxx --reason "핵심 베이스라인 누락"
# 단계에 가이던스 주입 (실행 전에도 가능)
researchclaw guide artifacts/rc-2026-xxx --stage 9 --message "ResNet-50을 주요 베이스라인으로 사용"
```
### 주요 기능
| 기능 | 설명 |
|------|------|
| **아이디어 워크숍** | 가설을 협력적으로 브레인스토밍, 평가, 정제 (7-8단계) |
| **베이스라인 내비게이터** | AI가 베이스라인 제안 + 인간이 추가/제거 + 재현성 체크리스트 (9단계) |
| **논문 코라이터** | 인간 편집과 AI 다듬기를 통한 섹션별 작성 (16-19단계) |
| **SmartPause** | 신뢰도 기반 동적 일시 정지 — 인간의 입력이 도움이 될 때를 자동 감지 |
| **클레임 검증** | 수집된 문헌과 대조한 인라인 팩트 체킹 — 근거 없는 주장을 플래그 |
| **비용 가드레일** | 50%/80%/100% 임계값 알림이 포함된 예산 모니터링 |
| **개입 학습** | ALHF — 검토 패턴에서 학습하여 향후 일시 정지 결정을 최적화 |
| **분기 탐색** | 파이프라인을 분기하여 여러 가설을 탐색, 비교, 최적 경로 병합 |
| **에스컬레이션 정책** | 계층형 알림 (터미널 → Slack → 이메일 → 자동 중지) 무인 시 |
| **3가지 어댑터** | CLI (터미널), WebSocket (웹 대시보드), MCP (외부 에이전트) |
### 설정
```yaml
# config.arc.yaml
hitl:
enabled: true
mode: co-pilot # full-auto | gate-only | checkpoint | co-pilot | custom
cost_budget_usd: 50.0 # 비용이 예산을 초과하면 일시 정지 (0 = 제한 없음)
notifications:
on_pause: true
on_quality_drop: true
channels: ["terminal"] # terminal | slack | webhook
timeouts:
default_human_timeout_sec: 86400 # 24시간 기본 대기
auto_proceed_on_timeout: false
collaboration:
max_chat_turns: 50
save_chat_history: true
# 단계별 커스텀 정책 (선택, 'custom' 모드용)
stage_policies:
8: { require_approval: true, enable_collaboration: true }
9: { require_approval: true, allow_edit_output: true }
```
### 하위 호환성
- **기본값: 꺼짐.** `hitl.enabled: true` 또는 `--mode` 없이는 파이프라인이 이전과 정확히 동일하게 동작합니다.
- **`--auto-approve`는 그대로 작동.** HITL 모드를 오버라이드합니다.
- **기존 2,699개 테스트 모두 통과** (HITL 코드 포함).
---
## 🧠 MetaClaw 통합
**AutoResearchClaw + [MetaClaw](https://github.com/aiming-lab/MetaClaw) = 모든 실행에서 학습하는 파이프라인.**
MetaClaw는 AutoResearchClaw에 **교차 실행 지식 전이**를 추가합니다. 활성화되면 파이프라인이 실패와 경고에서 자동으로 교훈을 추출하고, 이를 재사용 가능한 스킬로 변환하여 후속 실행의 전체 23단계에 주입합니다 — 같은 실수를 다시 반복하지 않습니다.
### 작동 방식
```
Run N executes → failures/warnings captured as Lessons
↓
MetaClaw Lesson → Skill conversion
↓
arc-* Skill files stored in ~/.metaclaw/skills/
↓
Run N+1 → build_overlay() injects skills into every LLM prompt
↓
LLM avoids known pitfalls → higher quality, fewer retries
```
### 빠른 설정
```bash
# 1. MetaClaw 설치 (미설치 시)
pip install metaclaw
# 2. 설정에서 활성화
```
```yaml
# config.arc.yaml
metaclaw_bridge:
enabled: true
proxy_url: "http://localhost:30000" # MetaClaw 프록시 (선택)
skills_dir: "~/.metaclaw/skills" # 스킬 저장 위치
fallback_url: "https://api.openai.com/v1" # 직접 LLM 폴백
fallback_api_key: "" # 폴백 URL의 API 키
lesson_to_skill:
enabled: true
min_severity: "warning" # warning + error 변환
max_skills_per_run: 3
```
```bash
# 3. 평소대로 실행 — MetaClaw가 투명하게 작동
researchclaw run --config config.arc.yaml --topic "Your idea" --auto-approve
```
각 실행 후 `~/.metaclaw/skills/arc-*/SKILL.md`를 확인하여 파이프라인이 학습한 스킬을 확인하세요.
### 실험 결과
대조 A/B 실험 (동일 주제, 동일 LLM, 동일 설정):
| 메트릭 | 기준선 | MetaClaw 사용 시 | 개선 |
|--------|--------|-----------------|------|
| 단계 재시도율 | 10.5% | 7.9% | **-24.8%** |
| Refine 사이클 수 | 2.0 | 1.2 | **-40.0%** |
| 파이프라인 단계 완료율 | 18/19 | 19/19 | **+5.3%** |
| 전체 견고성 점수 (종합) | 0.714 | 0.845 | **+18.3%** |
> 종합 견고성 점수는 단계 완료율 (40%), 재시도 감소 (30%), Refine 사이클 효율성 (30%)의 가중 평균입니다.
### 하위 호환성
- **기본값: 꺼짐.** `metaclaw_bridge`가 없거나 `enabled: false`이면 파이프라인은 이전과 정확히 동일하게 동작합니다.
- **새로운 종속성 없음.** MetaClaw는 선택 사항입니다 — 핵심 파이프라인은 MetaClaw 없이도 동작합니다.
- **기존 2,699개 테스트 모두 통과** (통합 코드 포함).
---
## 🧩 스킬 라이브러리
AutoResearchClaw는 이제 연구 경험을 더욱 향상시키기 위해 **오픈소스 및 커스텀 스킬** 로딩을 지원합니다. 과학적 글쓰기, 문헌 검색, 화학, 생물학 등을 포괄하는 **20개의 사전 로드된 내장 스킬**도 즉시 사용 가능한 참고자료로 제공되어 높은 유연성을 제공합니다. frontmatter에 `enabled: false`를 추가하여 스킬을 비활성화할 수 있습니다.
**내장 스킬 예시:**
| 카테고리 | 스킬 | 설명 |
|----------|------|------|
| **작성** | `scientific-writing` | IMRAD 구조, 인용 서식, 보고 가이드라인 |
| **도메인** | `chemistry-rdkit` | 분자 분석, SMILES, 핑거프린트, 신약 발견 |
| **실험** | `literature-search` | 체계적 리뷰, PRISMA 방법론 |
> `researchclaw skills list`로 20개 전체 스킬을 확인하세요.
### 직접 스킬 로딩
```bash
# 옵션 1: 스킬 설치 (프로젝트 간 영구 유지)
researchclaw skills install /path/to/my-skill/
# 옵션 2: 프로젝트에 SKILL.md 추가
mkdir -p .claude/skills/my-custom-skill
# YAML frontmatter(name, description, trigger-keywords, applicable-stages)가 포함된 SKILL.md를 생성
# 옵션 3: config.arc.yaml에서 공유 스킬 디렉토리 설정
# skills:
# custom_dirs:
# - /path/to/team-shared-skills
```
### 스킬 사용
스킬은 자동으로 로드되어 LLM 프롬프트에 주입됩니다 — 수동 활성화가 필요 없습니다. CLI로 확인:
```bash
researchclaw skills list # 소스와 함께 로드된 모든 스킬 표시
researchclaw skills validate ./my-skill # SKILL.md 형식 확인
```
커뮤니티 스킬 찾아보기: [K-Dense-AI/claude-scientific-skills](https://github.com/K-Dense-AI/claude-scientific-skills) (여러 분야에 걸친 150개 이상의 과학 스킬).
---
## ⚙️ 설정 참고서
전체 설정 참고서 펼치기
```yaml
# === 프로젝트 ===
project:
name: "my-research" # 프로젝트 식별자
mode: "docs-first" # docs-first | semi-auto | full-auto
# === 연구 ===
research:
topic: "..." # 연구 주제 (필수)
domains: ["ml", "nlp"] # 문헌 검색용 연구 분야
daily_paper_count: 8 # 검색 쿼리당 목표 논문 수
quality_threshold: 4.0 # 논문 최소 품질 점수
# === 런타임 ===
runtime:
timezone: "America/New_York" # 타임스탬프용
max_parallel_tasks: 3 # 동시 실험 제한
approval_timeout_hours: 12 # 게이트 단계 타임아웃
retry_limit: 2 # 단계 실패 시 재시도 횟수
# === LLM ===
llm:
provider: "openai-compatible" # openai | openrouter | deepseek | minimax | acp | openai-compatible
base_url: "https://..." # API 엔드포인트 (openai-compatible 필수)
api_key_env: "OPENAI_API_KEY" # API 키용 환경 변수 (openai-compatible 필수)
api_key: "" # 또는 키를 직접 입력
primary_model: "gpt-4o" # 기본 모델
fallback_models: ["gpt-4o-mini"] # 폴백 체인
s2_api_key: "" # Semantic Scholar API 키 (선택, 더 높은 속도 제한)
acp: # provider: "acp" 인 경우에만 사용
agent: "claude" # ACP 에이전트 CLI 명령어 (claude, codex, gemini 등)
cwd: "." # 에이전트의 작업 디렉토리
# === 실험 ===
experiment:
mode: "sandbox" # simulated | sandbox | docker | ssh_remote
time_budget_sec: 300 # 실행당 최대 실행 시간 (기본값: 300초)
max_iterations: 10 # 최대 최적화 반복 횟수
metric_key: "val_loss" # 기본 메트릭 이름
metric_direction: "minimize" # minimize | maximize
sandbox:
python_path: ".venv/bin/python"
gpu_required: false
allowed_imports: [math, random, json, csv, numpy, torch, sklearn]
max_memory_mb: 4096
docker:
image: "researchclaw/experiment:latest"
network_policy: "setup_only" # none | setup_only | pip_only | full
gpu_enabled: true
memory_limit_mb: 8192
auto_install_deps: true # import 자동 감지 → requirements.txt
ssh_remote:
host: "" # GPU 서버 호스트명
gpu_ids: [] # 사용 가능한 GPU ID
remote_workdir: "/tmp/researchclaw_experiments"
opencode: # OpenCode Beast Mode (`researchclaw setup`으로 자동 설치)
enabled: true # 마스터 스위치 (기본값: true)
auto: true # 확인 없이 자동 트리거 (기본값: true)
complexity_threshold: 0.2 # 0.0-1.0 — 높을수록 복잡한 실험에서만 트리거
model: "" # 모델 오버라이드 (비어있으면 llm.primary_model 사용)
timeout_sec: 600 # OpenCode 생성 최대 초
max_retries: 1 # 실패 시 재시도 횟수
workspace_cleanup: true # 수집 후 임시 작업 공간 제거
# === 내보내기 ===
export:
target_conference: "neurips_2025" # neurips_2025 | iclr_2026 | icml_2026
authors: "Anonymous"
bib_file: "references"
# === 프롬프트 ===
prompts:
custom_file: "" # 사용자 정의 프롬프트 YAML 경로 (비어 있으면 기본값)
# === HITL 코파일럿 (v0.4.0 신규) ===
hitl:
enabled: false # true로 설정하여 HITL 활성화
mode: co-pilot # full-auto | gate-only | checkpoint | step-by-step | co-pilot | custom
cost_budget_usd: 0.0 # USD 비용 한도 (0 = 제한 없음)
notifications:
on_pause: true # 파이프라인 일시 정지 시 알림
on_quality_drop: true # 품질 문제 시 알림
channels: ["terminal"] # terminal | slack | webhook
timeouts:
default_human_timeout_sec: 86400 # 인간 입력 최대 24시간 대기
auto_proceed_on_timeout: false # true이면 타임아웃 시 자동 승인
collaboration:
max_chat_turns: 50 # 협업 세션당 최대 턴 수
save_chat_history: true # 채팅 로그 영구 저장
stage_policies: {} # 단계별 오버라이드 ('custom' 모드용)
# === 보안 ===
security:
hitl_required_stages: [5, 9, 20] # 사람의 승인이 필요한 단계
allow_publish_without_approval: false
redact_sensitive_logs: true
# === 지식 기반 ===
knowledge_base:
backend: "markdown" # markdown | obsidian
root: "docs/kb"
# === 알림 ===
notifications:
channel: "console" # console | discord | slack
target: ""
# === MetaClaw Bridge (선택) ===
metaclaw_bridge:
enabled: false # true로 설정하여 교차 실행 학습 활성화
proxy_url: "http://localhost:30000" # MetaClaw 프록시 URL
skills_dir: "~/.metaclaw/skills" # arc-* 스킬 저장 위치
fallback_url: "" # 프록시 장애 시 직접 LLM 폴백
fallback_api_key: "" # 폴백 엔드포인트의 API 키
lesson_to_skill:
enabled: true # 교훈을 스킬로 자동 변환
min_severity: "warning" # 변환할 최소 심각도
max_skills_per_run: 3 # 파이프라인 실행당 최대 새 스킬 수
prm: # Process Reward Model 품질 게이트 (선택)
enabled: false # LLM-as-judge를 사용하여 단계 출력 점수 매기기
model: "gpt-5.4" # PRM 심사 모델
votes: 3 # 다수결 투표 수
gate_stages: [5, 9, 15, 20] # PRM 게이트를 적용할 단계
# === OpenClaw 브릿지 ===
openclaw_bridge:
use_cron: false # 예약된 연구 실행
use_message: false # 진행 상황 알림
use_memory: false # 세션 간 지식 영속성
use_sessions_spawn: false # 병렬 서브세션 생성
use_web_fetch: false # 실시간 웹 검색
use_browser: false # 브라우저 기반 논문 수집
```
---
## 🙏 감사의 말
다음 프로젝트에서 영감을 받았습니다:
- 🔬 [AI Scientist](https://github.com/SakanaAI/AI-Scientist) (Sakana AI) — 자동화 연구의 선구자
- 🧠 [AutoResearch](https://github.com/karpathy/autoresearch) (Andrej Karpathy) — 엔드투엔드 연구 자동화
- 🌐 [FARS](https://analemma.ai/blog/introducing-fars/) (Analemma) — 완전 자동 연구 시스템
---
## 📄 라이선스
MIT — 자세한 내용은 [LICENSE](../LICENSE)를 참조하세요.
---
## 📌 인용
AutoResearchClaw가 유용했다면, 아래를 인용해 주세요:
```bibtex
@misc{liu2026autoresearchclawselfreinforcingautonomousresearch,
title={AutoResearchClaw: Self-Reinforcing Autonomous Research with Human-AI Collaboration},
author={Jiaqi Liu and Shi Qiu and Mairui Li and Bingzhou Li and Haonian Ji and Siwei Han and Xinyu Ye and Peng Xia and Zihan Dong and Congyu Zhang and Letian Zhang and Guiming Chen and Haoqin Tu and Xinyu Yang and Lu Feng and Xujiang Zhao and Haifeng Chen and Jiawei Zhou and Xiao Wang and Weitong Zhang and Hongtu Zhu and Yun Li and Jieru Mei and Hongliang Fei and Jiaheng Zhang and Linjie Li and Linjun Zhang and Yuyin Zhou and Sheng Wang and Caiming Xiong and James Zou and Zeyu Zheng and Cihang Xie and Mingyu Ding and Huaxiu Yao},
year={2026},
eprint={2605.20025},
archivePrefix={arXiv},
primaryClass={cs.AI},
url={https://arxiv.org/abs/2605.20025},
}
```
Built with 🦞 by the AutoResearchClaw team