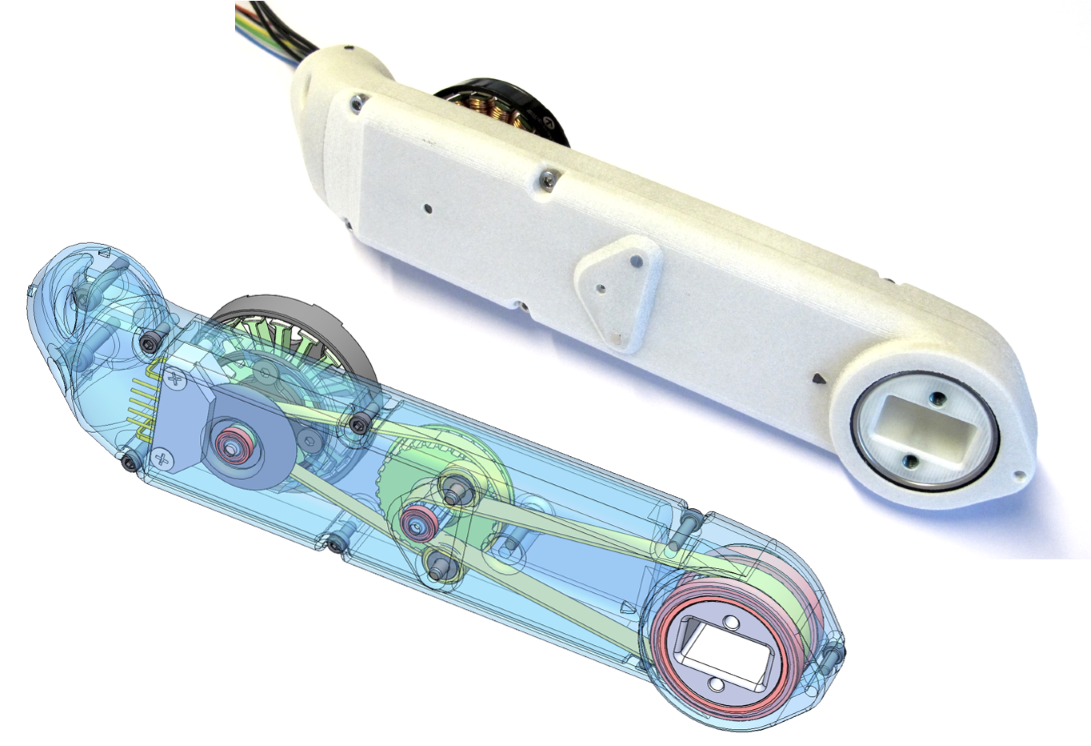
# Details Machined Parts
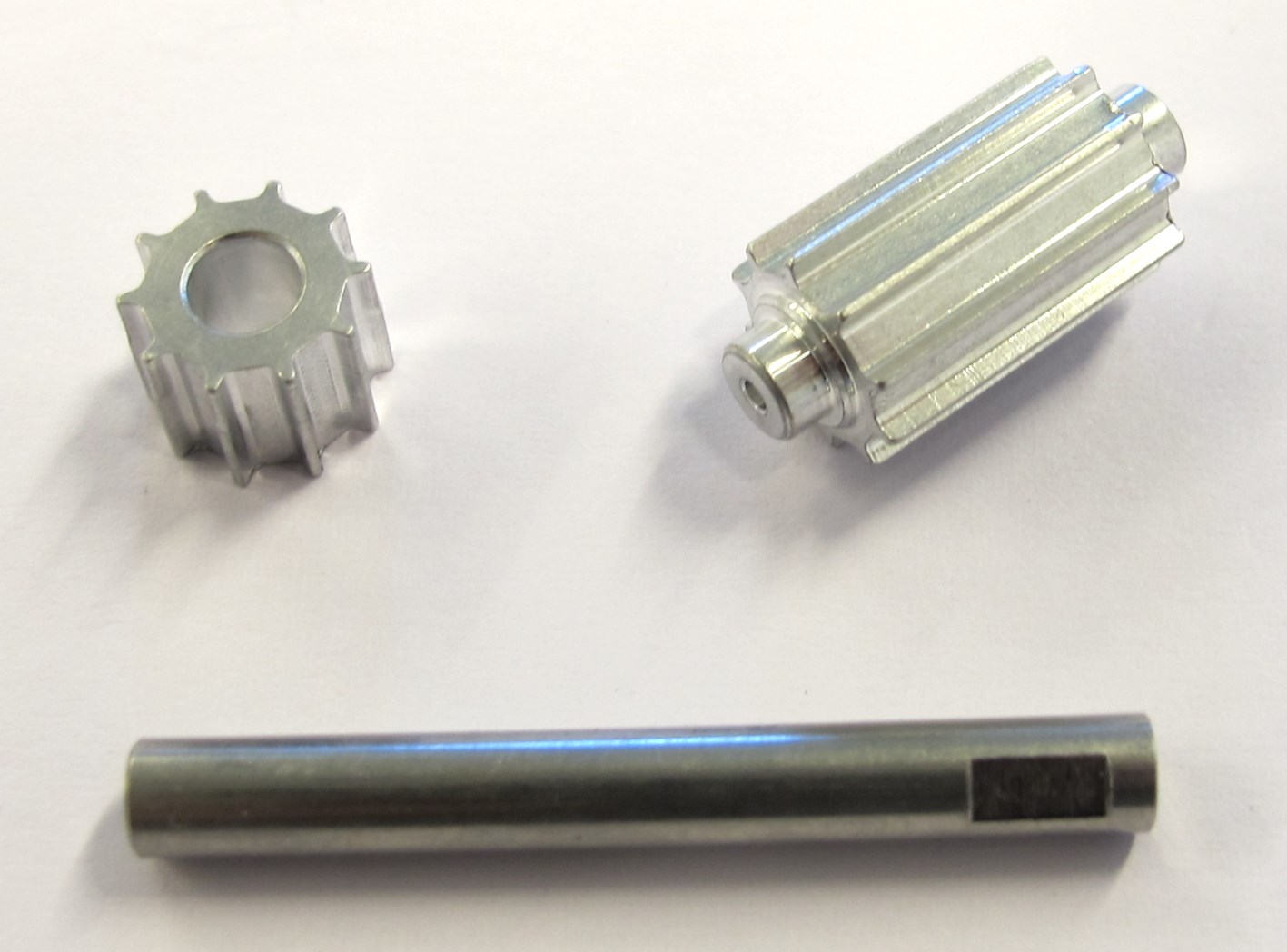
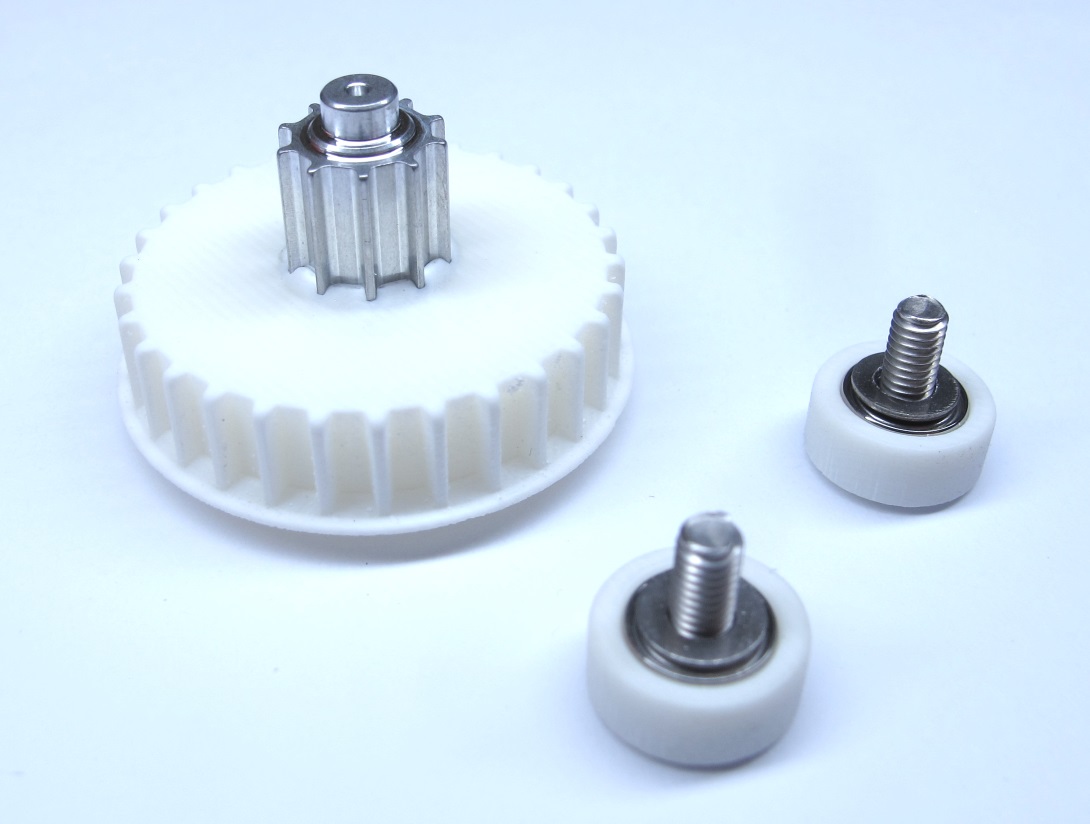
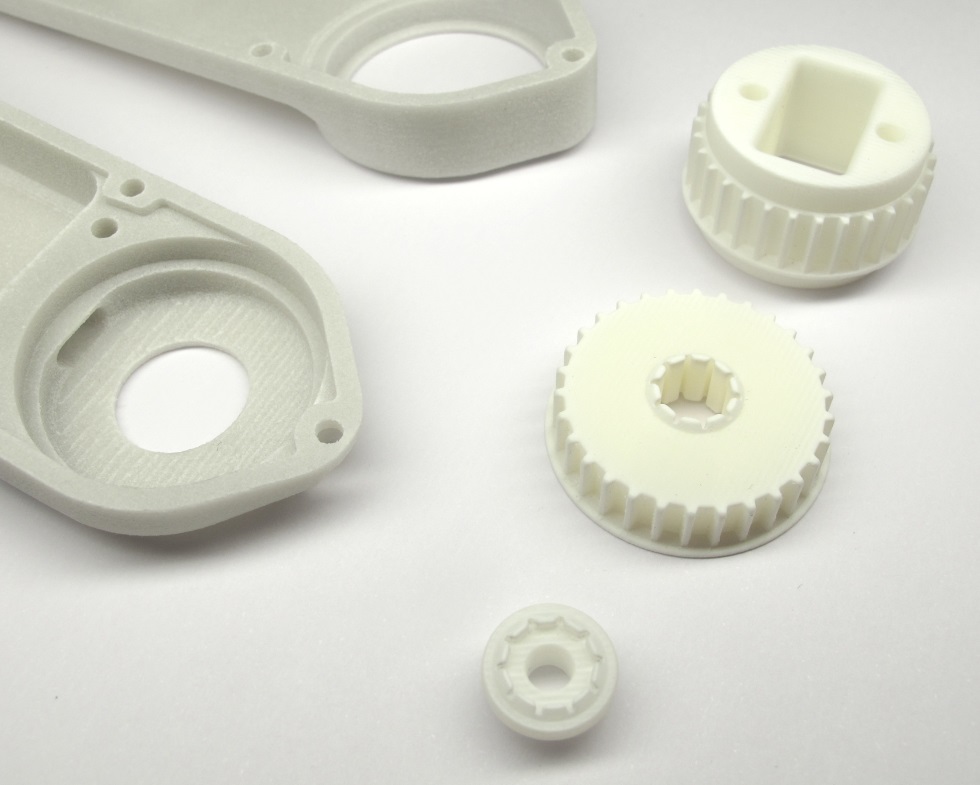
*Machined parts - motor shaft, motor pulley and center pulley.*
There are 3 parts in the actuator module that have to be machined from metal - there is more information below.
Alternatively you can order the ODRI Encoder Kit that includes all the machined parts. More information can be found in the [Actuator Module Core v1.1 Documentation](../actuator_module_v1.1.md#brushless-actuator-module-core-v11).
## Timing Belt Pulleys
### Description:
For best performance the tooth profile of the pulleys has to be very precise.
You can order a custom form cutter with the right cutting profile geometry and machine the parts on a milling machine.
(Option A below)
Alternatively you can use Wire EDM (Wire Electrical Discharge) machining to generate the 2d tooth profile.
(Option B below)
The remaining machining steps can be done on a lathe.
**Caution: Don't use standard AT3 timing belt pulley dimensions or tools.
We modified the original AT3 tooth profile in order to reduce backlash.**
### Option A - Form Cutter
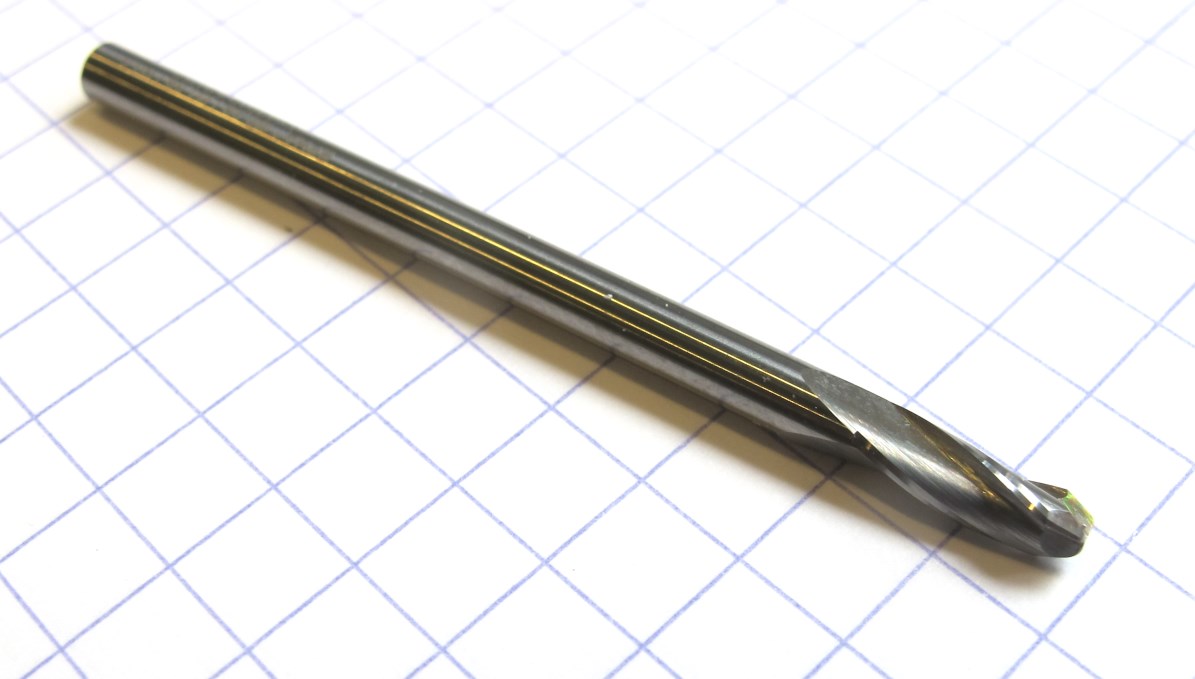
*Custom Form Cutter with AT3 tooth profile*
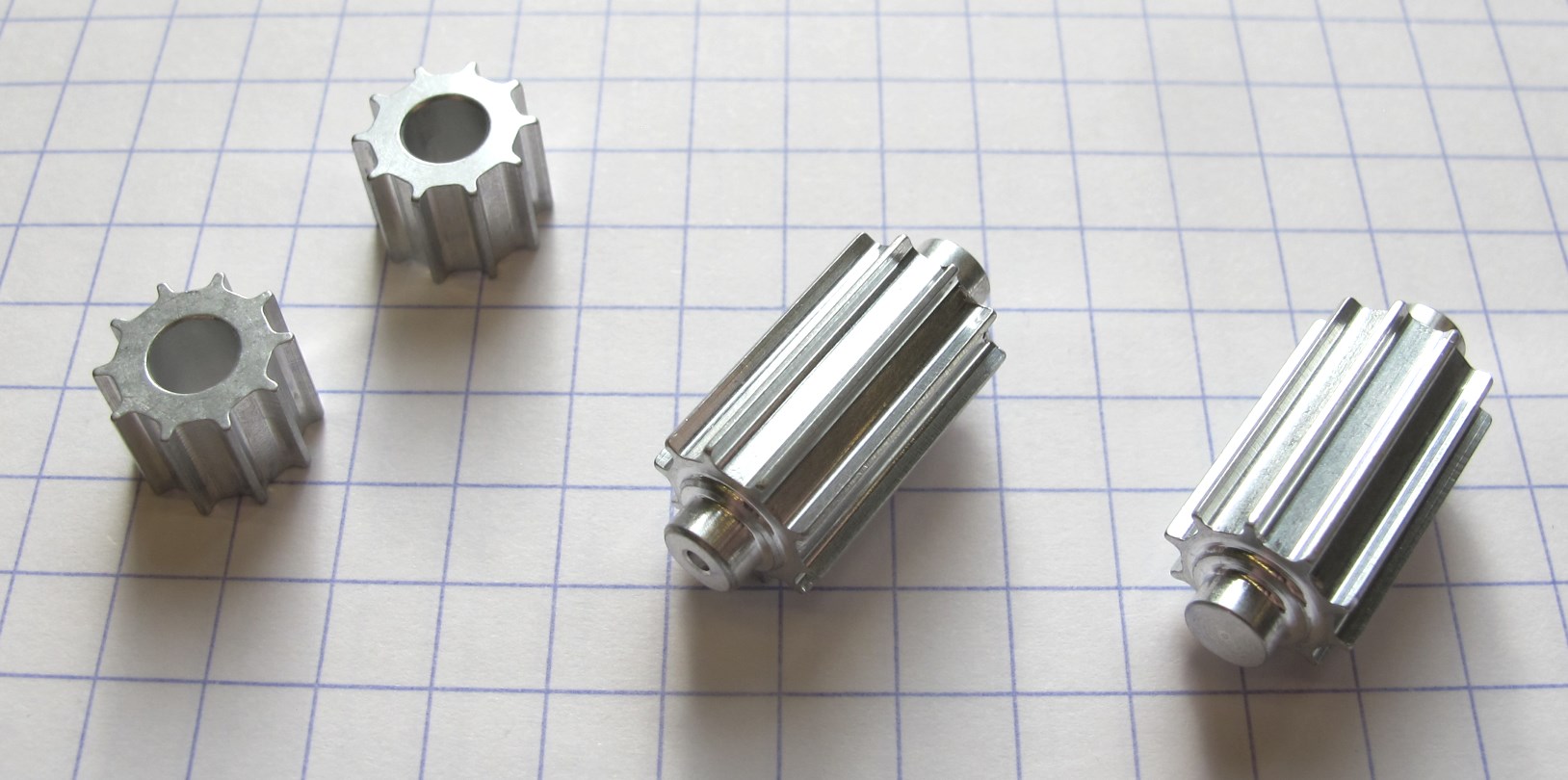
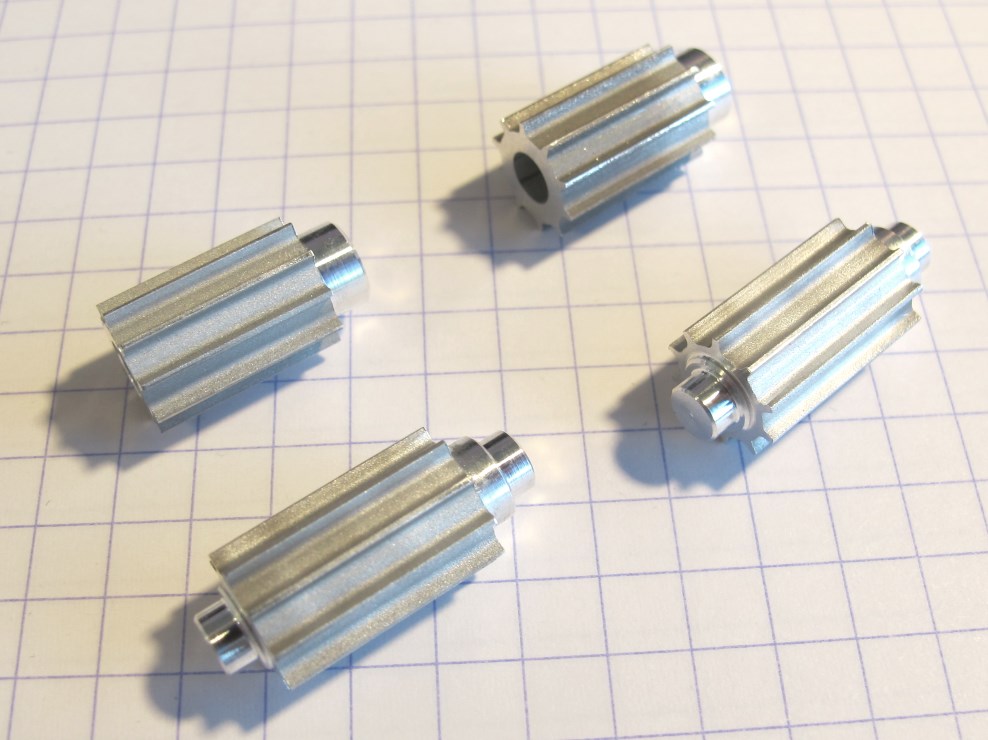
*Aluminum AT3 pulleys machined with Custom Form Cutter*
#### Instructions
* Find a company that offers custom tooling and that can produce custom form cutters.
* Send them this [PDF Drawing](../drawings/pulley_at3_t10_form_cutter.PDF) and ask them to quote a custom form cutter that will create the specified profile.
* You should mention that the tool will be used to machine 7075 aluminum.
* We use a 3mm shaft form cutter with 3 teeth at a helix angle of 20 degrees.
* When you have received your custom form cutter send the tool and the drawings below to a machine shop of your choice and have the parts machined.
* [Drawing Motor Pulley](../drawings/motor_pulley_at3_t10.PDF)
* [Drawing Center Pulley](../drawings/center_pulley_at3_t10.PDF)
---
### Option B - Wire EDM Cutting
#### Instructions
* alternatively the tooth profile can be generated with a wire edm machine
* we did some initial tests to evaluate this option
* in terms of cost it doesn't seem to be an advantage and we're not sure how the much rougher surface will affect the life span of the timing belts
* we are therefore not pursuing this option any longer
* [PDF Drawing Wire EDM Geometry](../drawings/pulley_at3_t10_wire_edm.PDF)
* [DXF File Wire EDM Geometry](../drawings/pulley_at3_t10_wire_edm.zip)
---
## Motor Shafts

* for the machining the motor shafts we order 4mm h9 precision ground stainless steel stock material
* the stock material diameter is between 3,99mm and 3,97mm
* the stock material fits the motor bearings without additional adjustments
* we order the stock material from [Weinmann Aach](https://weinmann-aach.de/) in Germany
* Precision Ground Stainless Steel Rod 1.4301 EN10278 h9 4,0mm (erd4)
* machine the motor shafts according to this drawing: [PDF Drawing Motor Shaft](../drawings/motor_shaft.PDF)
---
## Step-by-Step Instructions
| Motor Preparation | Motor Shaft Preparation | Encoder Preparation |Center Pulley Preparation|
| --- | --- | --- | --- |
|  |
|  |
|  |
| |
| Output Pulley Preparation | Shell Preparation | Actuator Module Assembly |Actuator Module Testing|
| --- | --- | --- | --- |
|
|
| Output Pulley Preparation | Shell Preparation | Actuator Module Assembly |Actuator Module Testing|
| --- | --- | --- | --- |
|  |
|  |
|  |
| |
---
## More Details
| Details 3d Printed Parts | Details Machined Parts | Mechanical Tools and Consumables |Electronic Components and Tools|
| --- | --- | --- | --- |
|
|
---
## More Details
| Details 3d Printed Parts | Details Machined Parts | Mechanical Tools and Consumables |Electronic Components and Tools|
| --- | --- | --- | --- |
| ||
|| |
| |
---
## More Information
[Open Dynamic Robot Initiative - Webpage](https://open-dynamic-robot-initiative.github.io)
[Open Dynamic Robot Initiative - YouTube Channel](https://www.youtube.com/channel/UCx32JW2oIrax47Gjq8zNI-w)
[Open Dynamic Robot Initiative - Forum](https://odri.discourse.group/categories)
[Open Dynamic Robot Initiative - Paper](https://arxiv.org/pdf/1910.00093.pdf)
[Hardware Overview](../../../README.md#open-robot-actuator-hardware)
[Software Overview](https://github.com/open-dynamic-robot-initiative/open-dynamic-robot-initiative.github.io/wiki)
[Back to Actuator Module](../README.md)
[Back to Top of Page](#details-machined-parts)
---
## Authors
Felix Grimminger
## License
BSD 3-Clause License
## Copyright
Copyright (c) 2019-2021, Max Planck Gesellschaft and New York University
|
---
## More Information
[Open Dynamic Robot Initiative - Webpage](https://open-dynamic-robot-initiative.github.io)
[Open Dynamic Robot Initiative - YouTube Channel](https://www.youtube.com/channel/UCx32JW2oIrax47Gjq8zNI-w)
[Open Dynamic Robot Initiative - Forum](https://odri.discourse.group/categories)
[Open Dynamic Robot Initiative - Paper](https://arxiv.org/pdf/1910.00093.pdf)
[Hardware Overview](../../../README.md#open-robot-actuator-hardware)
[Software Overview](https://github.com/open-dynamic-robot-initiative/open-dynamic-robot-initiative.github.io/wiki)
[Back to Actuator Module](../README.md)
[Back to Top of Page](#details-machined-parts)
---
## Authors
Felix Grimminger
## License
BSD 3-Clause License
## Copyright
Copyright (c) 2019-2021, Max Planck Gesellschaft and New York University