12/21/21-12/23/21¶
12/21/21¶
Attendance: ☐ Brody, ☑ Derek, ☐ Jack¶
Goals:¶
Continue building the new robot.
Accomplished:¶
☑ Attach the back lift to the drive base.
How:¶
Derek built the drive base and connected it to the drive base. He also added a physical stop to ensure that the back lift does not extend farther than it needs to. Currently this lift is only using one piston to tilt the lift but once we get another double acting piston we will be able to add it which will strengthen the lift.
Why:¶
Due to lack of parts Derek altered the CAD to make the drive base 32 wholes long instead of the planned 33 wholes long. Since the ordered parts will not arrive in time for the January comp we are instead using the drive base c-channels from our first robot.
Since we are unable to order more pneumatic pistons, we must wait and borrow one from Wando High School. Until then we will just be using one pneumatic on the back lift.
12/22/21¶
Attendance: ☐ Brody, ☑ Derek, ☐ Jack¶
Goals:¶
Build the Lift.
Accomplished:¶
☑ Build the Lift.
☑ Build and attach the front clamp.
How:¶
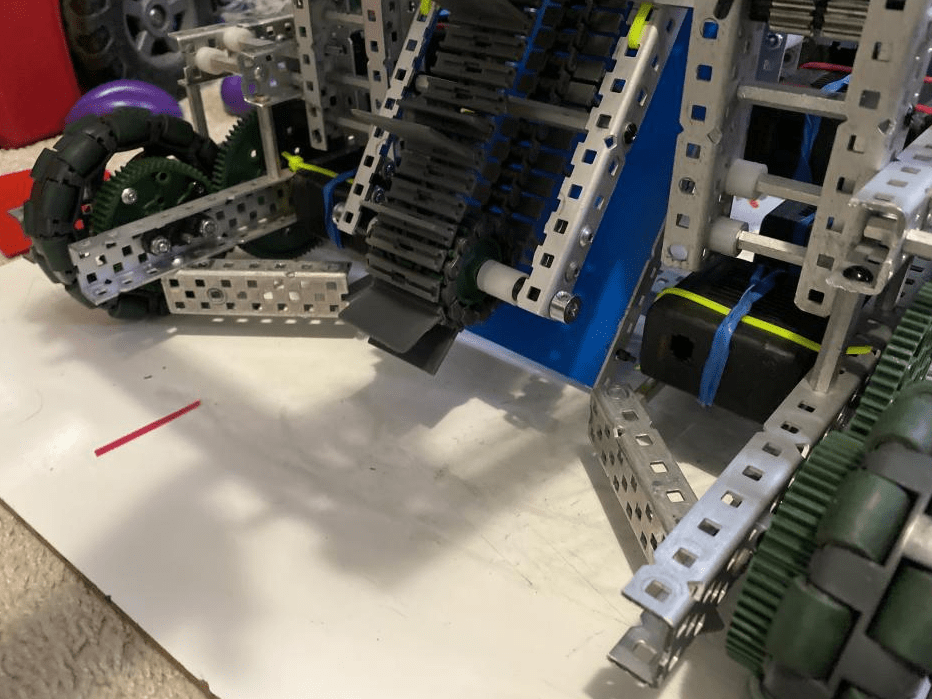
Derek built the lift today and attached it to the rest of the robot. He also built and attached the front clamp onto the lift. The improvement to the front clamp is that this new one also has a c-channel rest flat on the top of the mobile goals which allows it to hold onto the goal with a very secure grip.
Why:¶
Derek designed the front clamp like this because this design will majorly increase the strength of our front lift which will most likely be holding a yellow goal which opposing teams will try and grab from our robot, so having a tight grip on the goal will be crucial.
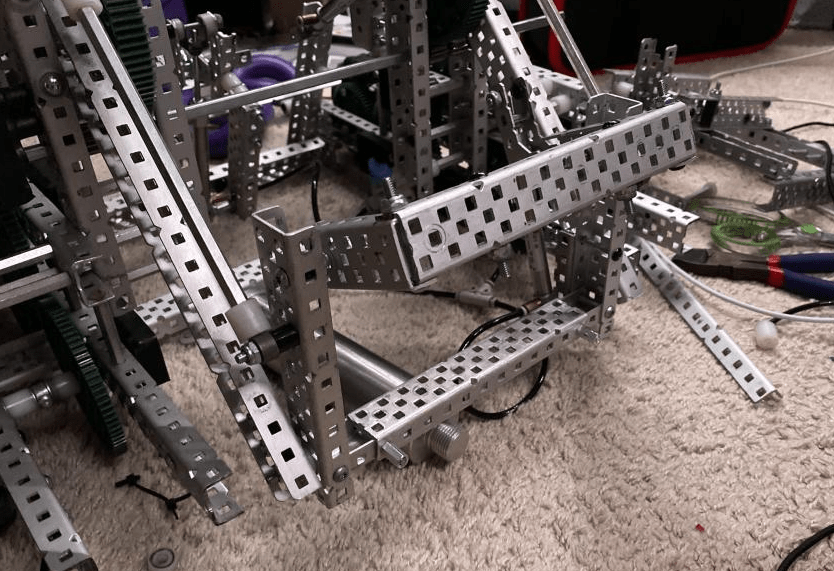
Fig. 33 A view of the front clamp¶
12/23/21¶
Attendance: ☐ Brody, ☑ Derek, ☐ Jack¶
Goals:¶
Build and implement the conveyer belt.